Recognition: 2 theorem links
· Lean TheoremMobile Traffic Camera Calibration from Road Geometry for UAV-Based Traffic Surveillance
Pith reviewed 2026-05-13 06:39 UTC · model grok-4.3
The pith
Road geometry visible in UAV footage calibrates monocular video to metric bird's-eye views for traffic analytics.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Estimating a road-plane homography from visible road geometry in monocular oblique UAV footage produces a local metric bird's-eye-view representation; vehicle ground-contact points then project into this view, supporting estimation of direction, speed, heading, and dynamic 3D cuboids on the road plane.
What carries the argument
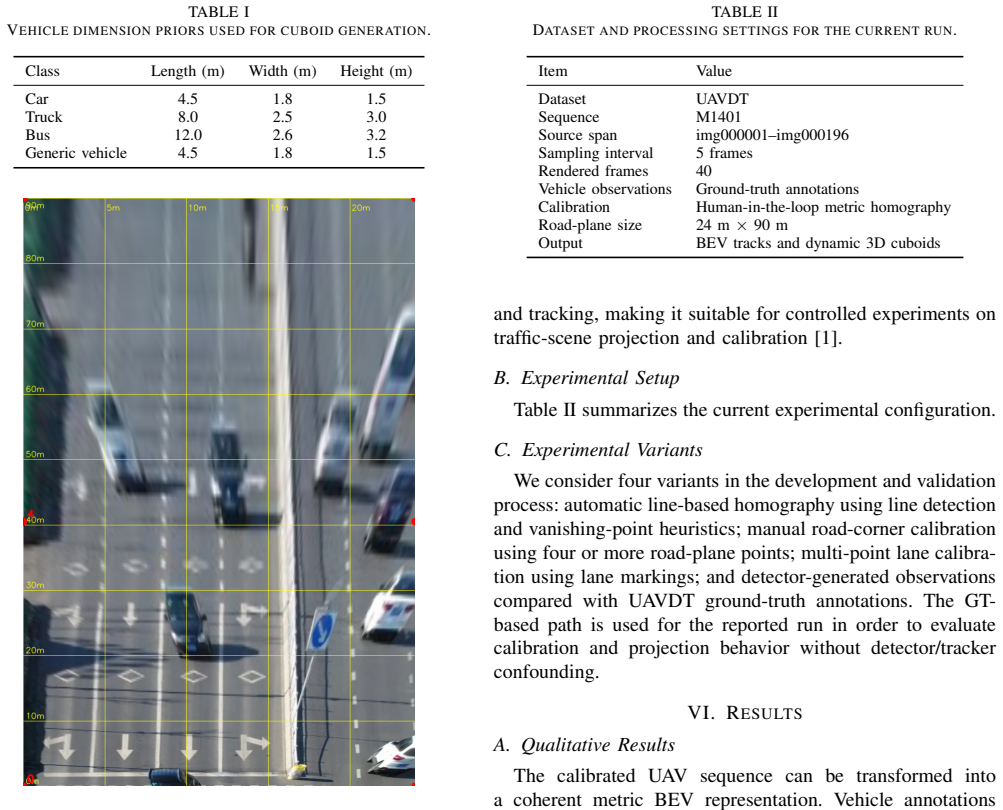
Road-plane homography estimated from lane markings, road borders, and crosswalks, which maps image coordinates to metric ground-plane coordinates for vehicle projection.
If this is right
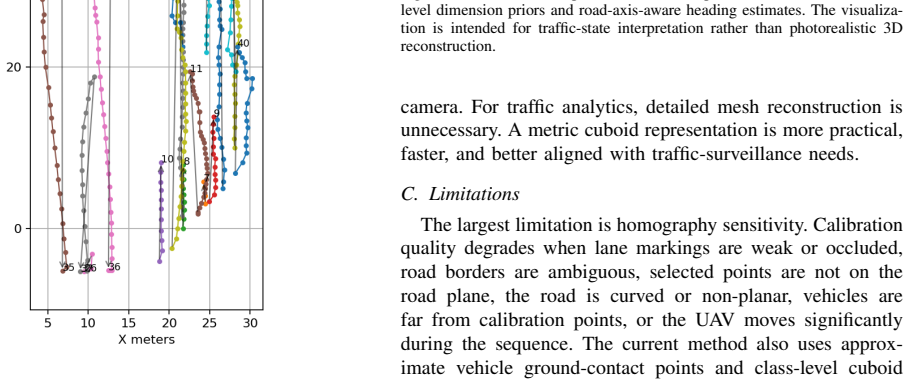
- Vehicle observations yield metric trajectories usable for speed and direction estimation.
- Dynamic 3D cuboids can be placed and visualized directly on the road plane in sync with tracks.
- The pipeline supplies traffic analytics comparable to fixed cameras from movable UAV platforms.
- It supplies a practical starting point for real-time traffic digital-twin systems.
Where Pith is reading between the lines
- Fully automatic road-feature detection would remove the current reliance on manual homography validation.
- The single-plane model could be relaxed by incorporating local plane fitting or depth cues on non-flat sections.
- Temporal consistency across frames might reduce far-field sensitivity without extra hardware.
- The same homography approach could adapt to other oblique moving-camera traffic observations such as vehicle dash cams.
Load-bearing premise
The road surface is treated as a single flat plane and manual validation of the homography remains acceptable for reliable results.
What would settle it
Comparison of projected vehicle positions against independent ground-truth measurements on a sequence containing either non-planar road sections or far-field vehicles would show systematic position errors exceeding the reported accuracy.
Figures



read the original abstract
Unmanned aerial vehicles (UAVs) can provide flexible traffic surveillance where fixed roadside cameras are unavailable, costly, or impractical. However, raw UAV video is difficult to use for traffic analytics because vehicle motion is observed in perspective image coordinates rather than in a stable metric road coordinate system. This paper presents a lightweight pipeline for converting monocular oblique UAV traffic video into a local metric bird's-eye-view (BEV) representation. Visible road geometry, including lane markings, road borders, and crosswalks, is used to estimate a road-plane homography from image coordinates to metric ground-plane coordinates. Vehicle observations from dataset annotations or detectors are then projected to BEV using estimated ground contact points. The resulting trajectories support estimation of vehicle direction, speed, heading, and dynamic 3D cuboids on the road plane. We evaluate the pipeline on UAVDT using ground-truth annotations to isolate calibration and geometric reconstruction from detector and tracker errors. For sequence M1401, 40 sampled frames from img000001-img000196 produce 632 metric cuboid instances across 23 tracks. Results show that road-geometry calibration can transform monocular UAV footage into interpretable traffic-camera-style analytics, including BEV tracks and synchronized 3D cuboid visualizations. They also reveal key limitations: far-field vehicles are sensitive to homography errors, manual validation is currently more reliable than fully automatic calibration, and the single-plane assumption limits performance in non-planar or ambiguous road regions. The proposed pipeline provides a practical foundation for deployable UAV traffic cameras and future real-time traffic digital-twin systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a lightweight pipeline that estimates a metric homography from visible road geometry (lane markings, borders, crosswalks) in monocular oblique UAV traffic video to a local bird's-eye-view (BEV) ground-plane coordinate system. Vehicle detections or annotations are projected via estimated ground contact points to produce BEV trajectories from which direction, speed, heading, and dynamic 3D cuboids are derived. Evaluation isolates calibration accuracy using ground-truth annotations on UAVDT sequence M1401 (40 frames, 632 cuboid instances across 23 tracks), showing qualitative BEV tracks and synchronized cuboid visualizations while explicitly noting limitations on far-field sensitivity, manual validation, and the single-plane road assumption.
Significance. If the geometric claims hold under the stated assumptions, the work supplies a practical, annotation-light route to metric traffic analytics from flexible UAV platforms, independent of vehicle tracking for the calibration step itself. The explicit separation of road-geometry calibration from downstream tracking, together with the concrete instance count on a public sequence, provides a reproducible starting point for UAV-based digital-twin traffic systems.
major comments (2)
- [Abstract and Evaluation] Abstract and Evaluation section: the claim that the pipeline yields 'usable metric tracks' rests on 632 cuboid instances, yet no quantitative error metrics (reprojection error, BEV position RMSE, or speed error against ground-truth metric positions) are reported; only qualitative visualizations are described, leaving the magnitude of far-field homography sensitivity unquantified.
- [Method and Limitations] Method and Limitations: the single-plane road-surface assumption is load-bearing for homography metric accuracy (any camber or grade change induces inconsistent scaling), but the evaluation on M1401 provides no explicit planarity test or sensitivity analysis on the chosen sequence, even though the abstract itself flags this as a performance limiter.
minor comments (2)
- [Abstract] The abstract states that height for the 3D cuboids is recovered, but the manuscript does not specify whether vehicle height is assumed constant, measured from annotations, or derived from another cue.
- [Method] Notation for the homography matrix and ground-contact-point estimation should be introduced with explicit equations rather than descriptive prose to aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major comment point by point below and will revise the manuscript accordingly to strengthen the evaluation.
read point-by-point responses
-
Referee: [Abstract and Evaluation] Abstract and Evaluation section: the claim that the pipeline yields 'usable metric tracks' rests on 632 cuboid instances, yet no quantitative error metrics (reprojection error, BEV position RMSE, or speed error against ground-truth metric positions) are reported; only qualitative visualizations are described, leaving the magnitude of far-field homography sensitivity unquantified.
Authors: We agree that quantitative error metrics are needed to substantiate the claim of usable metric tracks and to quantify far-field sensitivity. The current evaluation isolates calibration accuracy using ground-truth annotations on the public UAVDT M1401 sequence (632 cuboid instances) and presents qualitative BEV tracks and cuboid visualizations. In the revised manuscript we will add explicit quantitative results: homography reprojection error on the road-geometry points, BEV position RMSE for the projected cuboids, and errors in derived speeds and headings where metric ground-truth is available from the annotations. revision: yes
-
Referee: [Method and Limitations] Method and Limitations: the single-plane road-surface assumption is load-bearing for homography metric accuracy (any camber or grade change induces inconsistent scaling), but the evaluation on M1401 provides no explicit planarity test or sensitivity analysis on the chosen sequence, even though the abstract itself flags this as a performance limiter.
Authors: We acknowledge that the single-plane assumption is central to metric accuracy and that the abstract already identifies it as a limitation. The M1401 sequence was selected because visual inspection indicates a largely planar road surface, but no dedicated planarity verification was performed. In the revision we will add an explicit planarity test (e.g., residual analysis when fitting the homography to multiple subsets of road points) together with a sensitivity study that perturbs the plane parameters and reports the resulting changes in calibration and downstream metrics. revision: yes
Circularity Check
No circularity; homography derived from independent road geometry features
full rationale
The derivation estimates a metric homography directly from visible road markings, borders, and crosswalks whose real-world dimensions are known a priori (standard lane widths, etc.). Vehicle tracks and 3D cuboids are then obtained by forward projection under this homography. No equation redefines the homography parameters from the resulting tracks or cuboids, nor does any 'prediction' reduce to a fitted quantity defined by the target output. Evaluation uses ground-truth annotations solely to measure error, without any self-referential fitting loop. The single-plane assumption is stated as an explicit precondition and limitation, not as a derived result.
Axiom & Free-Parameter Ledger
free parameters (1)
- homography estimation parameters
axioms (1)
- domain assumption Road surface is approximately planar
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclearThe core of the method is the image-to-ground homography HI→G. Calibration is obtained from road-plane point correspondences: (ui,vi)↔(xi,yi)... The homography is estimated with more than four correspondences when available, using lane markings, road borders, crosswalk corners...
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclearThe current method assumes that the relevant traffic surface is locally planar... The single-plane assumption limits performance in non-planar or ambiguous road regions.
Reference graph
Works this paper leans on
-
[1]
The Unmanned Aerial Vehicle Benchmark: Object Detection and Tracking,
D. Du, Y . Qi, H. Yu, Y . Yang, K. Duan, G. Li, W. Zhang, Q. Huang, and Q. Tian, “The Unmanned Aerial Vehicle Benchmark: Object Detection and Tracking,” inProc. European Conference on Computer Vision (ECCV), 2018, pp. 370–386
work page 2018
-
[2]
Road Traffic Monitoring from UA V Images Using Deep Learning Networks,
S. Byun, D. Lee, H. Park, and H. Choi, “Road Traffic Monitoring from UA V Images Using Deep Learning Networks,”Remote Sensing, vol. 13, no. 20, Art. no. 4027, 2021
work page 2021
-
[3]
Vehicle Tracking and Speed Estimation from UA V Videos,
S. M. Tilon, T. Nex, and G. V osselman, “Vehicle Tracking and Speed Estimation from UA V Videos,”ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, vol. X-1/W1-2023, pp. 431–438, 2023
work page 2023
-
[4]
Automated Camera Calibration via Homography Estimation with GNNs,
G. D’Amicantonio, E. Bondarev, and P. H. N. de With, “Automated Camera Calibration via Homography Estimation with GNNs,” inProc. IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2024, pp. 5876–5883
work page 2024
-
[5]
Lift, Splat, Shoot: Encoding Images from Arbitrary Camera Rigs by Implicitly Unprojecting to 3D,
J. Philion and S. Fidler, “Lift, Splat, Shoot: Encoding Images from Arbitrary Camera Rigs by Implicitly Unprojecting to 3D,” inProc. European Conference on Computer Vision (ECCV), 2020, pp. 194–210
work page 2020
-
[6]
N. Trukhina and V . Vashkelis, “Hybrid Visual Telemetry for Bandwidth- Constrained Robotic Vision: A Pilot Study with HEVC Base Video and JPEG ROI Stills,” arXiv preprint arXiv:2605.01826, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.