Recognition: unknown
Hybrid Visual Telemetry for Bandwidth-Constrained Robotic Vision: A Pilot Study with HEVC Base Video and JPEG ROI Stills
Pith reviewed 2026-05-10 14:35 UTC · model grok-4.3
The pith
Hybrid transmission of low-bitrate HEVC video plus selective JPEG ROI stills refines object classification better than video alone at the same total bitrate.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
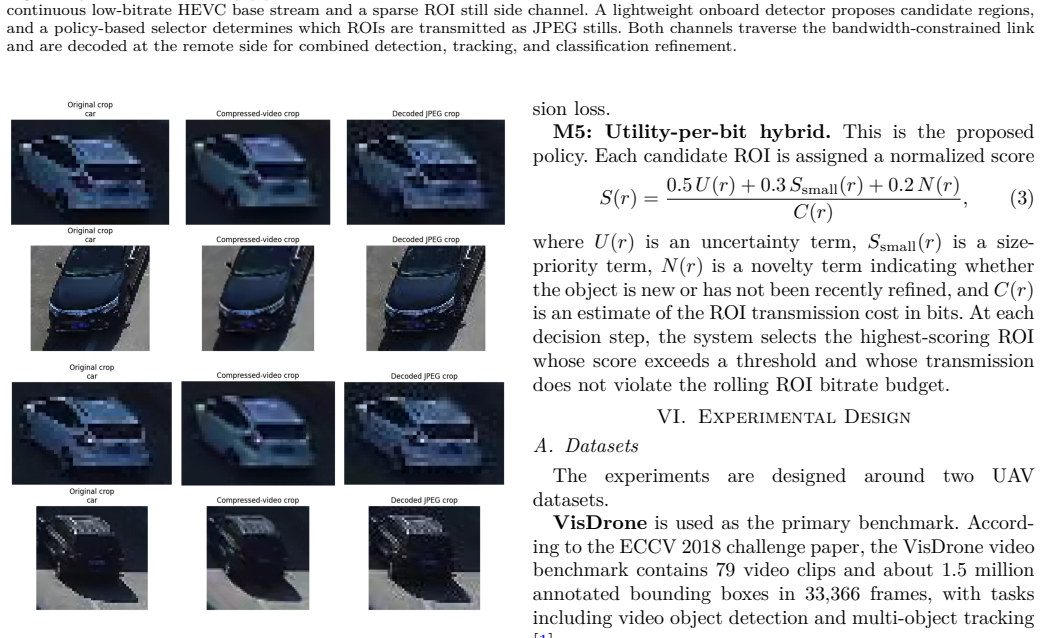
The central claim is that a two-channel scheme consisting of a continuous low-bitrate HEVC video stream augmented by event-driven high-detail JPEG ROI stills supports better object-level classification refinement than video-only transmission when total communication budget is fixed. This is shown through direct comparison on UAV datasets across two bitrate regimes and several ROI triggering policies, establishing the hybrid paradigm itself with standard codecs.
What carries the argument
The hybrid two-channel telemetry scheme that pairs a continuous HEVC base video stream for scene awareness with selectively transmitted JPEG ROI stills for local detail refinement, chosen by triggering policies to respect the overall bitrate constraint.
If this is right
- Object-level classification accuracy improves when high-detail ROI stills supplement the low-bitrate video stream.
- The fine local information lost in HEVC compression can be restored selectively without raising total data cost.
- The experimental protocol with matched budgets and UAV data provides a reusable method for testing other still-image codecs in the same hybrid setup.
- ROI selection policies act as the control mechanism that balances detail gain against bandwidth cost.
Where Pith is reading between the lines
- The separation of continuous awareness and high-detail analytics channels may extend to other constrained robotic platforms if ROI policies are tuned to new environments.
- Adding semantic information to the triggering decision could further reduce unnecessary still transmissions while preserving classification gains.
- The results imply that pure video streams are fundamentally limited for recognition tasks and that hybrid designs are a practical response to that limit.
Load-bearing premise
That ROI triggering policies can reliably select regions where the extra detail improves classification without consuming a disproportionate share of the bandwidth budget.
What would settle it
Compare hybrid and video-only performance on a new UAV dataset with different object types and bitrates; if classification accuracy is not higher for the hybrid scheme at matched total bitrate, the central claim fails.
Figures

read the original abstract
Bandwidth-constrained robotic and surveillance systems often rely on a single compressed video stream to support both continuous scene awareness and downstream machine perception. In practice, this creates a mismatch: low-bitrate video can preserve motion and coarse context, but often loses the fine local detail needed for reliable object recognition and decision-making. Motivated by a hybrid architecture in which low-resolution video supports dynamic scene understanding while eventdriven high-detail regions of interest (ROIs) support close-up identification and analytics, this paper formalizes a two-channel visual telemetry scheme in which a continuous low-bitrate video stream is augmented by selectively transmitted high-detail still ROIs. This first paper does not attempt to prove the superiority of a new still-image codec. Instead, it establishes the hybrid transmission paradigm itself using a practical and reproducible codec stack: x265/HEVC for the base video stream and JPEG stills for ROI refinement. We formulate the problem as bitrate-constrained information selection for robotic vision and define an experimental protocol in which video-only and hybrid schemes are compared under matched total communication budgets. The study is designed around UAV-oriented datasets, two practical bitrate regimes, several ROI triggering policies, and object-level classification refinement on selectively transmitted ROI stills. The resulting paper lays the methodological foundation for a second-stage investigation of JPEG AI as the semantic still-image channel within the same hybrid architecture.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a hybrid visual telemetry architecture for bandwidth-constrained robotic and UAV systems. A continuous low-bitrate HEVC (x265) video stream provides dynamic scene context while selectively triggered high-detail JPEG ROI stills supply fine-grained detail for object-level classification refinement. The authors formalize the two-channel scheme as bitrate-constrained information selection, define a reproducible experimental protocol that compares video-only versus hybrid transmission under matched total communication budgets, and evaluate the protocol on UAV-oriented datasets across two bitrate regimes and multiple ROI triggering policies. The work explicitly positions itself as a methodological pilot that does not claim to demonstrate superiority of any new codec but instead establishes the hybrid paradigm as a foundation for subsequent studies using semantic still-image codecs such as JPEG AI.
Significance. If the defined protocol is sound and reproducible, the manuscript supplies a practical baseline for hybrid visual telemetry that directly addresses the mismatch between low-bitrate video's motion preservation and the fine-detail requirements of downstream machine perception. The choice of widely available codecs (HEVC and JPEG) and the explicit matched-budget comparison framework increase the likelihood that other researchers can extend the work. The stress-test concern that ROI triggering policies must demonstrably deliver classification gains does not land as a load-bearing issue for this manuscript, because the paper states it does not attempt to prove superiority and instead focuses on establishing the transmission paradigm and experimental design itself.
major comments (1)
- [Abstract and §3] Abstract and §3 (Experimental Protocol): the manuscript states that video-only and hybrid schemes are compared under matched total communication budgets, yet supplies no quantitative classification accuracy figures, error bars, or tables summarizing the outcomes of those comparisons. Without these data the reader cannot verify whether the protocol actually isolates the contribution of the JPEG ROI channel.
minor comments (3)
- [§3] Clarify the exact formulas or heuristics used for the ROI triggering policies and how the total bit budget is partitioned between the HEVC stream and the JPEG stills (e.g., average bits per still, trigger frequency).
- [§4] Provide explicit references and version numbers for the UAV datasets and the x265/HEVC and JPEG encoder configurations employed.
- [§3.2] Add a short discussion of how object-level classification refinement is measured (e.g., top-1 accuracy, mAP on the ROI crops) to make the evaluation metric unambiguous.
Simulated Author's Rebuttal
We thank the referee for the constructive review and the recommendation for minor revision. We address the single major comment below.
read point-by-point responses
-
Referee: [Abstract and §3] Abstract and §3 (Experimental Protocol): the manuscript states that video-only and hybrid schemes are compared under matched total communication budgets, yet supplies no quantitative classification accuracy figures, error bars, or tables summarizing the outcomes of those comparisons. Without these data the reader cannot verify whether the protocol actually isolates the contribution of the JPEG ROI channel.
Authors: We agree that the manuscript as submitted does not include explicit quantitative classification accuracy figures, error bars, or summary tables for the matched-budget video-only versus hybrid comparisons. Although the work is framed as a methodological pilot that establishes the hybrid paradigm and reproducible protocol rather than claiming superiority, the referee is correct that these data are needed for readers to verify isolation of the JPEG ROI channel's contribution. In the revised manuscript we will add a table (and supporting text) in §3 that reports mean classification accuracies and standard deviations for both schemes across the two bitrate regimes and ROI triggering policies; the abstract will be updated to reference these results. This addition will be limited to the outcomes of the existing experimental protocol and will not alter the paper's positioning as a foundation for subsequent JPEG AI studies. revision: yes
Circularity Check
No circularity: empirical protocol using existing codecs with no derivations or fitted predictions
full rationale
The paper describes an experimental setup comparing hybrid HEVC video plus selective JPEG ROI stills against video-only transmission under matched total bit budgets on UAV datasets. It formulates the problem as bitrate-constrained information selection and defines triggering policies and classification refinement metrics, but introduces no mathematical derivations, parameter fits, or predictions that reduce to the inputs by construction. The central claim rests on empirical outcomes rather than self-definitional equations, self-cited uniqueness theorems, or renamed known results. Existing codecs (x265/HEVC and JPEG) are used without modification or ansatz smuggling, and the protocol is presented as a methodological foundation for future work rather than a closed-form result. This is a standard self-contained empirical pilot study with no load-bearing circular steps.
Axiom & Free-Parameter Ledger
free parameters (2)
- bitrate regimes
- ROI triggering policies
axioms (2)
- domain assumption Total communication budget can be matched exactly between video-only and hybrid transmissions
- domain assumption UAV-oriented datasets are representative of operational robotic vision conditions
Forward citations
Cited by 1 Pith paper
-
Mobile Traffic Camera Calibration from Road Geometry for UAV-Based Traffic Surveillance
Road geometry including lane markings and borders is used to calibrate monocular UAV video into a stable metric BEV representation supporting vehicle speed, heading, and 3D cuboid estimation.
Reference graph
Works this paper leans on
-
[1]
VisDrone- VDT2018: The Vision Meets Drone Video Detection and Track- ing Challenge Results,
P. Zhu, L. Wen, X. Bian, H. Ling, and Q. Hu, “VisDrone- VDT2018: The Vision Meets Drone Video Detection and Track- ing Challenge Results,” inProc. ECCV Workshops, 2018
2018
-
[2]
The Unmanned Aerial Vehicle Bench- mark: Object Detection and Tracking,
D. Du, Y. Qi, H. Yu, Y. Yang, K. Duan, G. Li, W. Zhang, Q. Huang, and Q. Tian, “The Unmanned Aerial Vehicle Bench- mark: Object Detection and Tracking,” inProc. ECCV, 2018
2018
-
[3]
JPEG XL,
JPEG Committee, “JPEG XL,” Official project pages and doc- umentation, 2023–2026
2023
-
[4]
x265 — Leading Open-Source HEVC Video Encoder,
MulticoreWare, “x265 — Leading Open-Source HEVC Video Encoder,” Official product page and documentation
-
[5]
HEVC Overview / H.265-HEVC,
Fraunhofer HHI, “HEVC Overview / H.265-HEVC,” Official overview pages
-
[6]
Deep Residual Learning for Image Recognition,
K. He, X. Zhang, S. Ren, and J. Sun, “Deep Residual Learning for Image Recognition,” inProc. CVPR, 2016, pp. 770–778
2016
-
[7]
YOLOX: Exceeding YOLO Series in 2021
Z. Ge, S. Liu, F. Wang, Z. Li, and J. Sun, “YOLOX: Exceeding YOLO Series in 2021,”arXiv preprint arXiv:2107.08430, 2021
work page internal anchor Pith review arXiv 2021
-
[8]
ByteTrack: Multi-Object Tracking by Associating Every Detection Box,
Y. Zhang, P. Sun, Y. Jiang, D. Yu, F. Weng, Z. Yuan, P. Luo, W. Liu, and X. Wang, “ByteTrack: Multi-Object Tracking by Associating Every Detection Box,” inProc. ECCV, 2022
2022
-
[9]
Workplan and Specifications of JPEG AI,
JPEG Committee, “Workplan and Specifications of JPEG AI,” Official workplan page; see also ISO/IEC 6048-1:2025 and ITU- T T.840.1
2025
-
[10]
Diff-ICMH: Harmonizing Machine and Human Vision in Image Compression with Generative Prior,
R. Feng, Y. Qi, J. Liu, Y. Gao, X. Li, X. Jin, and Z. Chen, “Diff-ICMH: Harmonizing Machine and Human Vision in Image Compression with Generative Prior,” 2025
2025
-
[11]
Adapt-ICMH: Image Compression for Machine and Human Vision with Lightweight Adapter-Based Tuning,
Anonymous, “Adapt-ICMH: Image Compression for Machine and Human Vision with Lightweight Adapter-Based Tuning,” arXiv preprint, 2024
2024
-
[12]
HI-MoE: Hierarchical Instance-Conditioned Mixture-of-Experts for Object Detection
N. Trukhina and V. Vashkelis, “HI-MoE: Hierarchical Instance- Conditioned Mixture-of-Experts for Object Detection,”arXiv preprint arXiv:2604.04908, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.