Recognition: no theorem link
Control of Fully Actuated Aerial Vehicles: A Comparison of Model-based and Sensor-based Dynamic Inversion
Pith reviewed 2026-05-13 05:09 UTC · model grok-4.3
The pith
Sensor-based INDI yields lower position errors than geometric NDI for fully actuated hexarotors under mismatches and gusts, though NDI tracks attitude better at reduced frequencies.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
On a fixed-tilt fully actuated hexarotor with decoupled translational and rotational dynamics, the incremental nonlinear dynamic inversion controller that estimates incremental forces and moments from sensor measurements achieves lower position tracking errors than the geometric nonlinear dynamic inversion controller under 50 percent rotor force coefficient mismatch, lateral external loads, wind gust disturbances, and injected sensor degradation, while the geometric controller delivers superior attitude tracking at reduced control frequencies; this constitutes the first experimental validation of full pose tracking using INDI on such a platform.
What carries the argument
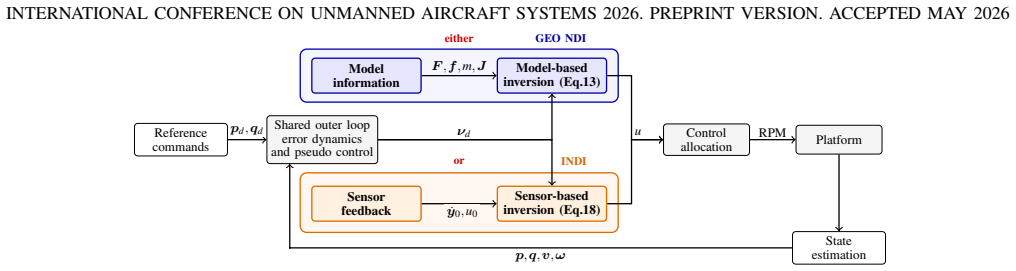
The inversion strategy, where geometric NDI inverts an analytical dynamic model to compute required actuator commands from desired accelerations and INDI instead uses sensor-derived incremental state derivatives to compute actuator increments without needing an exact model.
If this is right
- INDI maintains lower position errors than geometric NDI across the full controller-frequency sweep.
- Geometric NDI produces better attitude tracking than INDI when control frequency is reduced.
- INDI demonstrates clear advantages for robustness against actuator parameter mismatch, wind gusts, and sensor degradation.
- The shared outer-loop structure and 500 Hz execution rate isolate the inversion strategy as the source of measured differences.
- INDI enables the first validated full pose tracking with decoupled dynamics on a fully actuated hexarotor.
Where Pith is reading between the lines
- Control designers may favor INDI for UAV applications where model accuracy cannot be guaranteed in advance.
- A switched or blended controller could use geometric NDI for high-rate attitude tasks and INDI for position robustness under uncertainty.
- Repeating the comparison on variable-tilt or over-actuated platforms would test whether the observed trade-offs generalize beyond the fixed-tilt hexarotor.
- The results point toward testing INDI in GPS-denied environments where sensor degradation is more severe.
Load-bearing premise
Observed performance gaps can be attributed primarily to the choice of inversion method because both controllers share an identical outer loop and run at the same frequency.
What would settle it
An experiment in which both controllers experience identical 50 percent rotor force mismatch and geometric NDI produces position errors equal to or lower than INDI would falsify the reported advantage of INDI under parameter mismatch.
Figures





read the original abstract
Fully actuated multirotor platforms decouple translational force generation from vehicle attitude, enabling independent control of position and orientation and shifting performance limitations from attitude authority to actuator dynamics and control effectiveness. This paper compares a model-based nonlinear dynamic inversion controller (geometric NDI) with a sensor-based incremental dynamic inversion controller (INDI) on a fixed-tilt fully actuated hexarotor. Both controllers share an identical outer-loop structure and are both executed at 500 Hz; therefore, performance differences can be attributed primarily to the inversion strategy. Controller performance is evaluated in five experiments covering attitude step tracking under nominal conditions and under a 50% mismatch in the rotor force coefficient, hover disturbance rejection under an external lateral load, waypoint tracking in the presence of wind gust disturbances, reduced control frequency, and injected sensor degradation. The results show that INDI offers clear advantages under parameter mismatch, gust disturbances, and sensor degradation, and maintains lower position errors across the controller-frequency sweep. However, its advantages are not universal: geometric NDI yields better attitude tracking at reduced control frequencies. To the authors' best knowledge, this work presents the first experimental validation of a full pose tracking INDI controller with decoupled translational and rotational dynamics. These findings highlight the trade-off between measurement-based and model-based inversion for robust control and rapid deployment of fully actuated UAVs.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript compares a model-based geometric nonlinear dynamic inversion (NDI) controller with a sensor-based incremental dynamic inversion (INDI) controller on a fixed-tilt fully actuated hexarotor. Both controllers share an identical outer-loop structure and execute at 500 Hz, allowing the authors to attribute performance differences primarily to the inversion method. Five experiments evaluate attitude step tracking (nominal and 50% rotor force coefficient mismatch), hover disturbance rejection under lateral load, waypoint tracking with wind gusts, reduced control frequency, and injected sensor degradation. Results indicate INDI advantages under parameter mismatch, gusts, and sensor degradation with lower position errors across the frequency sweep, while geometric NDI yields better attitude tracking at reduced frequencies. The work claims to be the first experimental validation of full-pose INDI with decoupled translational and rotational dynamics.
Significance. If the isolation of the inversion strategy holds, the paper provides useful empirical evidence on trade-offs between model-based and sensor-based inversion for fully actuated UAVs, particularly highlighting INDI robustness in uncertain conditions. The multi-scenario experimental design with directionally consistent outcomes across nominal, mismatched, and degraded cases strengthens the practical relevance for rapid deployment of such platforms.
major comments (1)
- [Abstract; implementation and experimental setup sections] The central claim that performance gaps (e.g., INDI's lower position errors and advantages under mismatch/gusts/sensor degradation) can be attributed primarily to the inversion strategy rests on the shared outer-loop structure and identical 500 Hz execution. However, without explicit confirmation that inner-loop interfacing, force/torque allocation, and handling of decoupled dynamics are identical between geometric NDI (full nonlinear inversion) and INDI (incremental sensor-based updates), other implementation differences could explain the observed results. This is load-bearing for both the comparison conclusions and the 'first full-pose INDI validation' claim.
minor comments (2)
- Add explicit details on actuator allocation logic and any post-processing of sensor data to support reproducibility and rule out confounding factors.
- Clarify the exact error metrics (e.g., RMSE definitions) and any statistical tests used in the frequency sweep and disturbance rejection results.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and the opportunity to strengthen the manuscript. We address the major comment below and will revise the paper to provide the requested explicit confirmation.
read point-by-point responses
-
Referee: [Abstract; implementation and experimental setup sections] The central claim that performance gaps (e.g., INDI's lower position errors and advantages under mismatch/gusts/sensor degradation) can be attributed primarily to the inversion strategy rests on the shared outer-loop structure and identical 500 Hz execution. However, without explicit confirmation that inner-loop interfacing, force/torque allocation, and handling of decoupled dynamics are identical between geometric NDI (full nonlinear inversion) and INDI (incremental sensor-based updates), other implementation differences could explain the observed results. This is load-bearing for both the comparison conclusions and the 'first full-pose INDI validation' claim.
Authors: We agree that explicit confirmation of identical components beyond the outer loop and execution rate is essential to isolate the inversion strategy. Both controllers are implemented within the same ROS-based onboard software stack and share: (i) identical inner-loop interfacing to the Pixhawk autopilot via the same MAVLink message format and wrench-to-rotor allocation module (using the fixed-tilt hexarotor mixing matrix described in Section III-B); (ii) the same force/torque allocation logic that converts the desired wrench into individual rotor speed commands; and (iii) identical handling of decoupled translational/rotational dynamics through the shared outer-loop position controller that generates the reference wrench. The sole difference is the dynamic inversion block itself (full nonlinear geometric NDI versus incremental sensor-based INDI). We will revise the implementation section to include a side-by-side block diagram and pseudocode table explicitly labeling shared versus differing modules, thereby reinforcing both the comparison conclusions and the novelty claim. revision: yes
Circularity Check
No circularity: experimental comparison without derivation
full rationale
The paper is an empirical study comparing geometric NDI and INDI controllers on a hexarotor platform through five physical experiments (attitude tracking, mismatch, disturbances, frequency sweep, sensor degradation). Both controllers share an identical outer-loop structure and 500 Hz execution rate, so performance differences are attributed to the inversion strategy on the basis of measured outcomes rather than any internal equations. No mathematical derivation, prediction, or uniqueness theorem is presented that reduces to fitted parameters, self-citations, or ansatzes by construction. The work is self-contained against external benchmarks (real hardware data) and contains no load-bearing steps that collapse to their own inputs.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Both controllers share an identical outer-loop structure and run at the same 500 Hz rate, allowing attribution of differences to the inner-loop inversion method.
Reference graph
Works this paper leans on
-
[1]
Geometric tracking control of a quadrotor uav on se(3),
T. Lee, M. Leok, and N. H. McClamroch, “Geometric tracking control of a quadrotor uav on se(3),” in49th IEEE Conference on Decision and Control (CDC). IEEE, Dec. 2010, p. 5420–5425
work page 2010
-
[2]
Cascaded incremental nonlinear dynamic inversion for mav disturbance rejection,
E. Smeur, G. de Croon, and Q. Chu, “Cascaded incremental nonlinear dynamic inversion for mav disturbance rejection,”Control Engineering Practice, vol. 73, p. 79–90, Apr. 2018
work page 2018
-
[3]
F. Grondman, G. Looye, R. O. Kuchar, Q. P. Chu, and E.-J. Van Kam- pen, “Design and flight testing of incremental nonlinear dynamic inversion-based control laws for a passenger aircraft,” in2018 AIAA Guidance, Navigation, and Control Conference. American Institute of Aeronautics and Astronautics, Jan. 2018
work page 2018
-
[4]
F. A. Goodarzi, D. Lee, and T. Lee, “Geometric adaptive tracking control of a quadrotor unmanned aerial vehicle on se(3) for agile maneuvers,”Journal of Dynamic Systems, Measurement, and Control, vol. 137, no. 9, June 2015
work page 2015
-
[5]
In- cremental nonlinear dynamic inversion control for quadrotor uav with an angular accelerometer,
Q. Zhang, M. Fu, C. Zhai, S. Wang, K. Ning, and M. Wang, “In- cremental nonlinear dynamic inversion control for quadrotor uav with an angular accelerometer,” in2023 42nd Chinese Control Conference (CCC). IEEE, July 2023, p. 657–662
work page 2023
-
[6]
M. Ryll, H. H. B ¨ulthoff, and P. R. Giordano, “A novel overactuated quadrotor unmanned aerial vehicle: Modeling, control, and experimen- tal validation,”IEEE Transactions on Control Systems Technology, vol. 23, no. 2, pp. 540–556, 2015
work page 2015
-
[7]
The voliro omniorientational hexacopter: An agile and maneuverable tiltable-rotor aerial vehicle,
M. Kamel, S. Verling, O. Elkhatib, C. Sprecher, P. Wulkop, Z. Tay- lor, R. Siegwart, and I. Gilitschenski, “The voliro omniorientational hexacopter: An agile and maneuverable tiltable-rotor aerial vehicle,” IEEE Robotics & ; Automation Magazine, vol. 25, no. 4, p. 34–44, Dec. 2018
work page 2018
-
[8]
S. Seshasayanan and S. R. Sahoo, “Nonlinear control of a tilt aug- mented multi-rotor uav with a fixed maximum convergence rate in presence of inertia uncertainties,”Control Engineering Practice, vol. 168, p. 106747, Mar. 2026
work page 2026
-
[9]
Minimum snap trajectory generation and control for quadrotors,
D. Mellinger and V . Kumar, “Minimum snap trajectory generation and control for quadrotors,” in2011 IEEE International Conference on Robotics and Automation. IEEE, May 2011, p. 2520–2525
work page 2011
-
[10]
M. Faessler, A. Franchi, and D. Scaramuzza, “Differential flatness of quadrotor dynamics subject to rotor drag for accurate tracking of high-speed trajectories,”IEEE Robotics and Automation Letters, vol. 3, no. 2, p. 620–626, Apr. 2018
work page 2018
-
[11]
6d physical interaction with a fully actuated aerial robot,
M. Ryll, G. Muscio, F. Pierri, E. Cataldi, G. Antonelli, F. Caccavale, and A. Franchi, “6d physical interaction with a fully actuated aerial robot,” in2017 IEEE International Conference on Robotics and Automation (ICRA). IEEE, May 2017, p. 5190–5195
work page 2017
-
[12]
An omni-directional multirotor vehicle,
D. Brescianini and R. D’Andrea, “An omni-directional multirotor vehicle,”Mechatronics, vol. 55, p. 76–93, Nov. 2018
work page 2018
-
[13]
S. Sieberling, Q. P. Chu, and J. A. Mulder, “Robust flight control using incremental nonlinear dynamic inversion and angular acceleration prediction,”Journal of Guidance, Control, and Dynamics, vol. 33, no. 6, pp. 1732–1742, 2010
work page 2010
-
[14]
P. Simpl ´ıcio, M. Pavel, E. van Kampen, and Q. Chu, “An acceleration measurements-based approach for helicopter nonlinear flight control using incremental nonlinear dynamic inversion,”Control Engineering Practice, vol. 21, no. 8, pp. 1065–1077, 2013
work page 2013
-
[15]
Adaptive incremental nonlinear dynamic inversion for attitude control of micro air vehicles,
E. J. J. Smeur, Q. Chu, and G. C. H. E. de Croon, “Adaptive incremental nonlinear dynamic inversion for attitude control of micro air vehicles,”Journal of Guidance, Control, and Dynamics, vol. 39, no. 3, pp. 450–461, 2016
work page 2016
-
[16]
Ro- bust nonlinear spacecraft attitude control using incremental nonlinear dynamic inversion,
P. Acquatella, W. Falkena, E.-J. Van Kampen, and Q. Chu, “Ro- bust nonlinear spacecraft attitude control using incremental nonlinear dynamic inversion,” inAIAA Guidance, Navigation, and Control Conference, 01 2012
work page 2012
-
[17]
Full pose tracking via robust control for over-actuated multirotors,
M. Hachem, C. Roos, T. Miquel, and M. Bronz, “Full pose tracking via robust control for over-actuated multirotors,” in2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, Oct. 2025, p. 5031–5038
work page 2025
-
[18]
Zhao, Chenfeng Xu, Chen Tang, Chenran Li, Mingyu Ding, Masayoshi Tomizuka, and Wei Zhan
T. M. Blaha, E. J. J. Smeur, and B. D. W. Remes, “Control of unknown quadrotors from a single throw,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, Oct. 2024, p. 10350–10355. [Online]. Available: http://dx.doi.org/10.1109/IROS58592.2024.10801514
-
[19]
Flight test experience of a non-linear dynamic inversion control law on the vaac harrier,
P. Smith and A. Berry, “Flight test experience of a non-linear dynamic inversion control law on the vaac harrier,” inAtmospheric flight mechanics conference, 08 2000
work page 2000
-
[20]
E. Tal and S. Karaman, “Accurate tracking of aggressive quadrotor trajectories using incremental nonlinear dynamic inversion and differ- ential flatness,”IEEE Transactions on Control Systems Technology, vol. 29, no. 3, pp. 1203–1218, 2021
work page 2021
-
[21]
Agile spacecraft attitude con- trol: an incremental nonlinear dynamic inversion approach,
B. P. Acquatella and Q. P. Chu, “Agile spacecraft attitude con- trol: an incremental nonlinear dynamic inversion approach,”IFAC- PapersOnLine, vol. 53, no. 2, pp. 5709–5716, 2020, 21st IFAC World Congress
work page 2020
-
[22]
A. STEINERT, S. RAAB, S. HAFNER, F. HOLZAPFEL, and H. HONG, “From fundamentals to applications of incremental non- linear dynamic inversion: A survey on indi – part i,”Chinese Journal of Aeronautics, vol. 38, no. 11, p. 103553, 2025
work page 2025
-
[23]
Quaternion-based hybrid control for robust global attitude tracking,
C. G. Mayhew, R. G. Sanfelice, and A. R. Teel, “Quaternion-based hybrid control for robust global attitude tracking,”IEEE Transactions on Automatic Control, vol. 56, no. 11, p. 2555–2566, Nov. 2011
work page 2011
-
[24]
F. Bullo and A. D. Lewis,Geometric Control of Mechanical Systems: Modeling, Analysis, and Design for Simple Mechanical Control Sys- tems. Springer New York, 2005
work page 2005
-
[25]
Geometric nonlinear pid control of a quadrotor uav on se(3),
F. Goodarzi, D. Lee, and T. Lee, “Geometric nonlinear pid control of a quadrotor uav on se(3),” in2013 European Control Conference (ECC). IEEE, July 2013, p. 3845–3850
work page 2013
-
[26]
Geometric adaptive control for aerial transportation of a rigid body,
T. Lee, “Geometric adaptive control for aerial transportation of a rigid body,”arXiv preprint arXiv:1503.01148, 2015
-
[27]
Geometric control and differential flatness of a quadrotor UA V with a cable-suspended load,
K. Sreenath, T. Lee, and V . Kumar, “Geometric control and differential flatness of a quadrotor UA V with a cable-suspended load,” in52nd IEEE Conference on Decision and Control. IEEE, Dec. 2013
work page 2013
-
[28]
S. Rajappa, M. Ryll, H. H. Bulthoff, and A. Franchi, “Modeling, control and design optimization for a fully-actuated hexarotor aerial vehicle with tilted propellers,” in2015 IEEE International Conference on Robotics and Automation (ICRA). IEEE, May 2015, p. 4006–4013. [Online]. Available: http://dx.doi.org/10.1109/ICRA.2015.7139759
-
[29]
A. STEINERT, S. RAAB, S. HAFNER, F. HOLZAPFEL, and H. HONG, “Advancements in incremental nonlinear dynamic inversion and its components: A survey on indi – part ii,”Chinese Journal of Aeronautics, vol. 38, no. 11, p. 103591, 2025
work page 2025
-
[30]
T. A. Rupprecht, A. Steinert, C. Kotitschke, and F. Holzapfel, “Indi control law structure for a medevac evtol and its reference models: Feedforward, physical limitations, and innerloop dynamics for optimal tracking,” inAIAA Aviation Forum and Ascend 2024, 2024, p. 4425
work page 2024
-
[31]
Stability analysis for incremental nonlinear dynamic inversion control,
X. Wang, E.-J. van Kampen, Q. Chu, and P. Lu, “Stability analysis for incremental nonlinear dynamic inversion control,”Journal of Guidance, Control, and Dynamics, vol. 42, no. 5, pp. 1116–1129, 2019
work page 2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.