Recognition: 2 theorem links
· Lean TheoremEstimation Problems and the Modulating Function Method: The Algebra of Modulating Functions
Pith reviewed 2026-05-13 04:17 UTC · model grok-4.3
The pith
Modulating functions form a vector space and an algebra, allowing systematic construction of new families and orthonormal bases that avoid matrix inversion in parameter estimation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The set of total modulating functions forms a vector space and an algebra; exploiting this fact yields a construction algorithm for new families and, crucially, an orthonormal basis that performs parameter estimation of the boat roll dynamics without matrix inversion.
What carries the argument
The algebra of modulating functions, the fact that they are closed under addition, scalar multiplication, and pointwise multiplication and therefore constitute both a vector space and an algebra.
If this is right
- A simple algorithm now exists for generating new modulating-function families from existing ones.
- Orthonormal modulating functions can be constructed directly from the vector-space structure.
- Parameter estimation routines using these orthonormal functions require no matrix inversion.
- The same algebraic framework applies uniformly to state estimation, fault detection, and distributed or fractional systems.
Where Pith is reading between the lines
- The orthonormal construction may improve numerical conditioning when the same method is used on higher-dimensional or distributed-parameter models.
- The algebraic view could support adaptive selection of modulating functions during online estimation without recomputing large matrices.
- Similar closure properties might be exploitable in related filter-design problems outside the modulating-function literature.
Load-bearing premise
The algebraic closure and group properties of modulating functions will produce stable, accurate estimates when applied to real dynamical systems that contain noise and model mismatch.
What would settle it
Apply the constructed orthonormal modulating functions to measured roll-angle data from the boat and check whether the resulting parameter estimates match the known dynamics without matrix inversion and remain consistent when realistic sensor noise is added.
Figures

read the original abstract
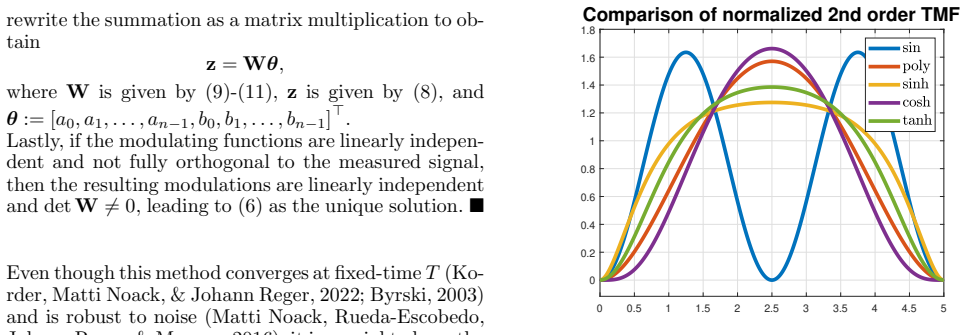
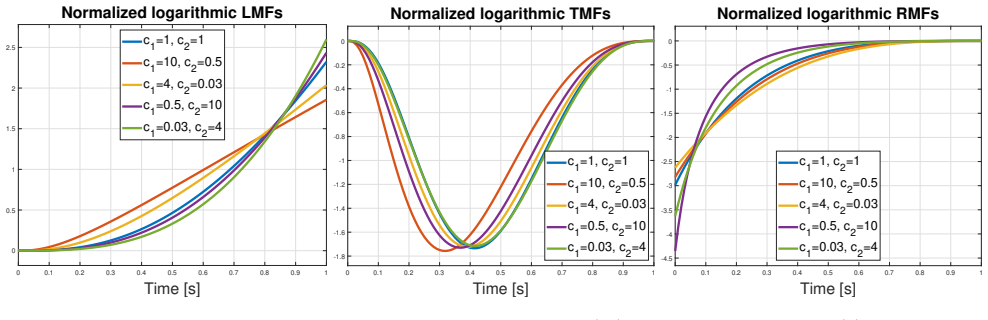
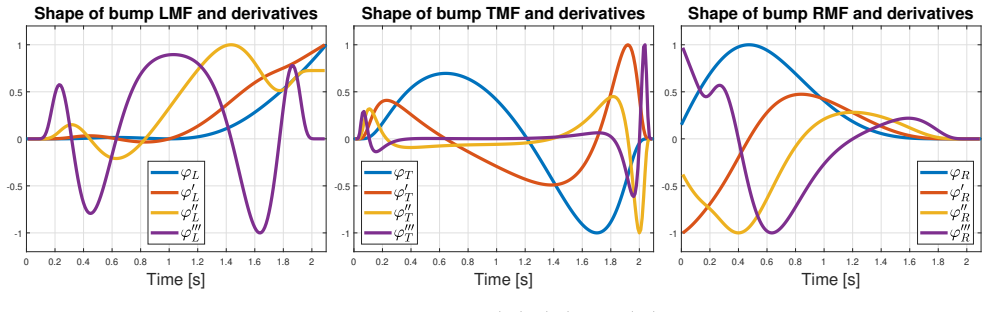
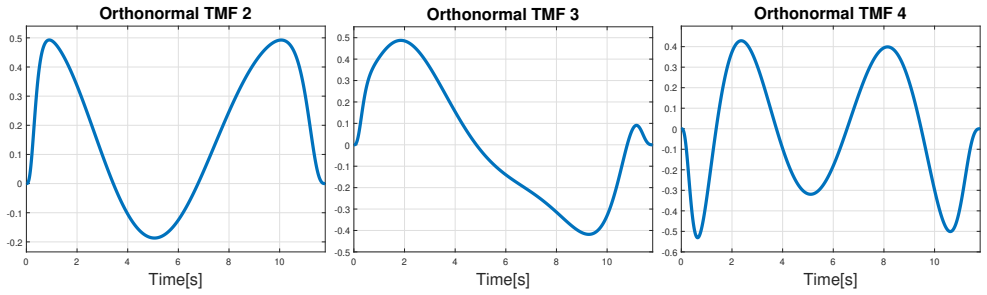
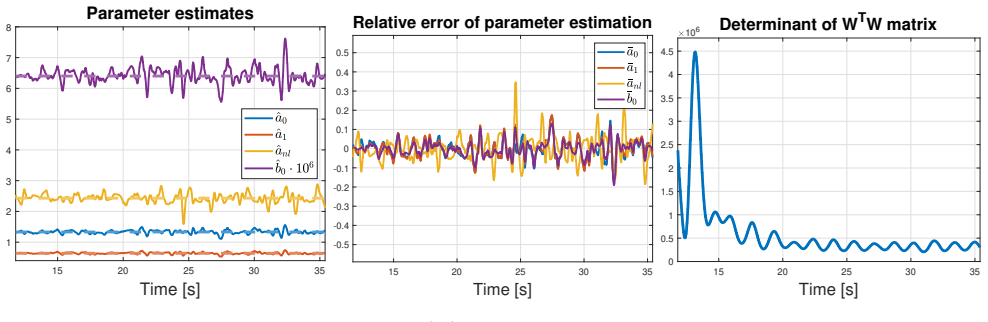
State and parameter estimation, along with fault detection, are three crucial estimation problems within the control systems community. Although different approaches have been proposed for each type of problem, the modulating function method proposes a more unified approach to all three problem classes, being used for state and parameter estimation of lumped systems, fault detection, and estimation of distributed and fractional systems. At the core of the method is the modulating function: a function that evaluates to 0 at the left or right boundaries up to a certain order of derivatives. By selecting the modulating functions, one directly determines the filter characteristics, and, for that reason, different function families have been proposed over the years. Nevertheless, many families of modulating functions are given in a rather similar mathematical structure. In light of these structures, this paper formally discusses the algebraic properties of modulating functions, and, after formalizing the closedness and group properties of modulating functions, a simple algorithm to construct new modulating functions is proposed, discussed, and illustrated with the construction of the newly introduced logarithmic modulating function families and 3 non-analytic modulating function families. Moreover, the fact that total modulating functions form a vector space and an algebra is exploited to construct orthonormal modulating functions, which are then used for the parameter estimation of a boat's roll dynamics, effectively avoiding matrix inversion issues.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper formalizes algebraic properties of modulating functions, establishing that they form a vector space and an algebra, and that certain families are closed under the relevant operations and satisfy group properties. It proposes a simple algorithm to generate new modulating functions (including logarithmic and three non-analytic families) and exploits the vector-space/algebra structure to construct orthonormal modulating functions. These orthonormal functions are then applied to parameter estimation for a boat's roll dynamics model, with the claim that the identity inner-product matrix eliminates the need for matrix inversion in the resulting linear system.
Significance. If the algebraic closure and orthonormality constructions preserve the boundary-vanishing conditions required for modulating functions, the approach offers a systematic way to generate well-conditioned regressors for estimation problems in control systems. The boat-roll example provides a concrete, reproducible illustration of the no-inversion benefit; combined with the explicit construction algorithm, this could reduce numerical sensitivity in lumped-parameter identification tasks. The formalization itself is a modest but useful organizing contribution to the modulating-function literature.
major comments (3)
- [boat-roll example / abstract] Abstract and boat-roll section: the claim that orthonormal modulating functions 'effectively avoid matrix inversion issues' is load-bearing for the practical contribution, yet the manuscript provides no quantitative error analysis, noise-sensitivity study, or comparison against standard (non-orthonormal) modulating-function estimators on the same boat data. Without these, it is impossible to verify that the algebraic construction actually yields more stable or accurate estimates under realistic sensor noise or model mismatch.
- [orthonormal modulating functions construction] Section on orthonormal construction: the inner product used to enforce orthonormality must be shown to commute with the differential operators appearing in the system equations; otherwise the resulting functions may lose the required boundary conditions (vanishing together with derivatives up to order n at the endpoints). The manuscript does not supply this compatibility argument or a counter-example check.
- [algebraic properties section] Formalization of vector-space and algebra properties: while the abstract states that total modulating functions form a vector space and an algebra, the precise operations (pointwise addition/multiplication, convolution, etc.) and the precise function space (support, smoothness class) under which closure holds are not stated with sufficient rigor to allow independent verification of the subsequent construction algorithm.
minor comments (2)
- Notation for the modulating-function families is introduced without a compact summary table listing the defining differential or integral conditions for each family; this would improve readability.
- The boat-roll dynamics model equations should be written explicitly (including the precise differential order and the regressor vector) so that the reader can directly map the orthonormal inner products to the parameter vector.
Simulated Author's Rebuttal
We thank the referee for the thorough and constructive review. The comments highlight important aspects of rigor and empirical validation that we address below. Our responses focus on clarifying the manuscript's contributions while incorporating revisions where they strengthen the work without altering its core algebraic framework.
read point-by-point responses
-
Referee: Abstract and boat-roll section: the claim that orthonormal modulating functions 'effectively avoid matrix inversion issues' is load-bearing for the practical contribution, yet the manuscript provides no quantitative error analysis, noise-sensitivity study, or comparison against standard (non-orthonormal) modulating-function estimators on the same boat data. Without these, it is impossible to verify that the algebraic construction actually yields more stable or accurate estimates under realistic sensor noise or model mismatch.
Authors: The primary claim is algebraic: orthonormality ensures the inner-product matrix is the identity, eliminating inversion by construction. This holds independently of noise. However, we acknowledge that demonstrating practical robustness under sensor noise strengthens the illustration. In the revision we will add a noise-sensitivity study and a direct comparison of estimation errors and condition numbers against a standard (non-orthonormal) modulating-function estimator on the same boat-roll dataset, thereby quantifying the numerical benefit. revision: yes
-
Referee: Section on orthonormal construction: the inner product used to enforce orthonormality must be shown to commute with the differential operators appearing in the system equations; otherwise the resulting functions may lose the required boundary conditions (vanishing together with derivatives up to order n at the endpoints). The manuscript does not supply this compatibility argument or a counter-example check.
Authors: We agree that an explicit compatibility argument is required. The construction applies the inner product within the subspace of functions already satisfying the boundary-vanishing conditions up to order n. Because the Gram-Schmidt orthogonalization (or equivalent projection) is performed entirely inside this closed subspace, the resulting orthonormal set inherits the same vanishing properties. In the revised manuscript we will insert a short lemma establishing that the chosen inner product commutes with the relevant differential operators in the sense that boundary conditions are preserved, together with a verification for the boat-roll example. revision: yes
-
Referee: Formalization of vector-space and algebra properties: while the abstract states that total modulating functions form a vector space and an algebra, the precise operations (pointwise addition/multiplication, convolution, etc.) and the precise function space (support, smoothness class) under which closure holds are not stated with sufficient rigor to allow independent verification of the subsequent construction algorithm.
Authors: We accept that the definitions can be stated more explicitly. The revised version will define the underlying function space as the set of C^{n} functions on [0,T] whose derivatives up to order n vanish at the endpoints, specify that the vector-space operations are pointwise addition and scalar multiplication, and that the algebra operation is pointwise multiplication. We will then prove closure under these operations and show that the construction algorithm remains inside the space, thereby enabling independent verification. revision: yes
Circularity Check
No circularity: algebraic properties and orthonormal construction are derived from the modulating function definition without reduction to inputs or self-citations
full rationale
The paper begins with the standard definition of modulating functions (vanishing at boundaries up to a given derivative order) and uses elementary linear algebra to show they form a vector space and algebra under pointwise operations. From this, it derives a construction algorithm for new families (including logarithmic and non-analytic ones) and orthonormal sets whose inner-product matrix is the identity. These steps are self-contained and do not rely on fitted parameters renamed as predictions, self-citations for uniqueness, or smuggling of ansatzes. The boat-roll estimation example follows directly from the orthonormal property eliminating the need for matrix inversion, with no reduction of the claimed results to the paper's own inputs.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption A modulating function evaluates to zero at the left or right boundary together with its derivatives up to a chosen order.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclearTheorem 7: Φ_T forms an abelian group under scalar addition, a vector space, and an associative and commutative algebra.
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanLogicNat.equivNat unclearConstruction of orthonormal TMFs via Gram-Schmidt on L2 inner product to avoid W^{-1} in parameter estimation (Section 4.3, Theorem 5).
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.