Recognition: 2 theorem links
· Lean TheoremBasilisk and Docker for Reproducible GN&C Simulation: A Workflow Reference
Pith reviewed 2026-05-13 03:48 UTC · model grok-4.3
The pith
Docker containerization makes Basilisk GN&C simulations reproducible across different machines and operating systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that a Docker-based containerization workflow encapsulates Basilisk's complete build environment, dependencies, and simulation infrastructure in a portable image, enabling reproducible GN&C simulations as shown by progressive demonstration cases from basic orbital scripts to full attitude dynamics with Monte Carlo analysis.
What carries the argument
The Docker container image that holds the complete Basilisk build environment, dependencies, and simulation infrastructure.
If this is right
- The same Basilisk scripts produce matching results on any machine that can run the container.
- GN&C researchers can advance from standalone orbital dynamics to BSKSim-based attitude control and Monte Carlo studies without reconfiguring local systems.
- Detailed descriptions of the class hierarchy and execution patterns allow direct reuse or modification of the flight software examples.
Where Pith is reading between the lines
- Other open-source simulation tools in aerospace could adopt similar container packaging to reduce setup friction for new users.
- Widespread use of the workflow might make it easier to verify published GN&C results by allowing reviewers to execute the exact same environment.
Load-bearing premise
The assumption that a single Docker image can fully encapsulate and resolve all practical challenges related to dependency management, operating system compatibility, and software configuration for Basilisk across heterogeneous environments.
What would settle it
Running the supplied Docker image on a new operating system or hardware configuration and obtaining different numerical outputs or failed builds compared with the paper's reported results would falsify the reproducibility claim.
Figures



read the original abstract
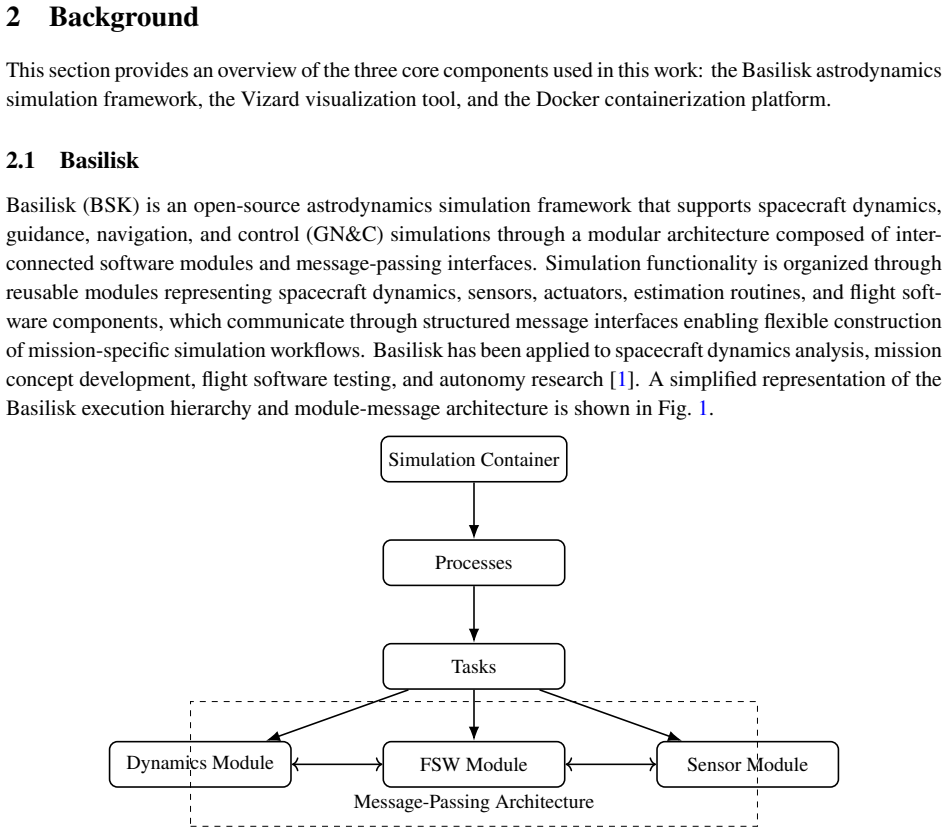
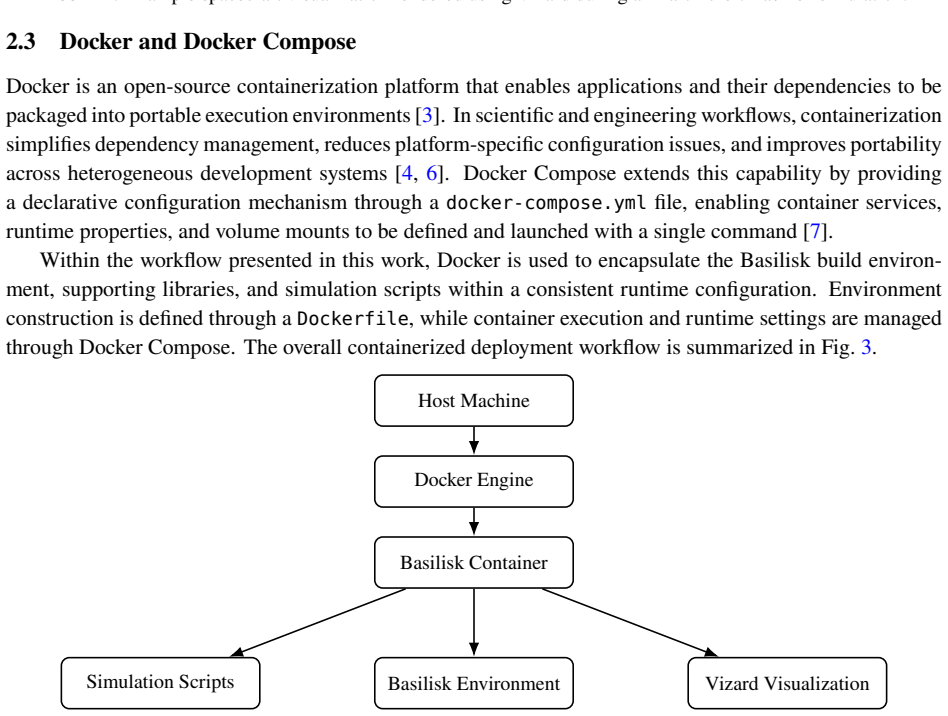
Basilisk is an open-source astrodynamics simulation framework widely used for spacecraft guidance, navigation, and control (GN&C) research and development. Despite its flexibility and computational capabilities, configuring Basilisk consistently across heterogeneous development environments presents practical challenges due to dependency management, operating system compatibility, and software configuration requirements. This paper presents a Docker-based containerization workflow for Basilisk that encapsulates the complete build environment, dependencies, and simulation infrastructure within a portable container image. The workflow is demonstrated through a progression of simulation scenarios of increasing complexity, from standalone orbital dynamics scripts to BSKSim-based attitude dynamics and control simulations with Monte Carlo analysis. The BSKSim class hierarchy, dynamics model architecture, flight software implementation, and scenario execution patterns are described in detail. The presented workflow provides a self-contained implementation reference for GN&C engineers and researchers seeking reproducible and portable Basilisk simulation environments. This work expands upon a workshop presentation delivered at the 46th Rocky Mountain AAS GN&C Conference, February 2024, available at https://doi.org/10.5281/zenodo.15008785.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a Docker-based containerization workflow for the Basilisk open-source astrodynamics simulation framework to address challenges in dependency management, OS compatibility, and configuration for GN&C research. It describes the BSKSim class hierarchy, dynamics model architecture, and flight software implementation, then demonstrates the workflow via a progression of simulation scenarios of increasing complexity, from standalone orbital dynamics scripts to attitude dynamics/control simulations with Monte Carlo analysis. The work positions itself as a self-contained implementation reference and expands on a prior workshop presentation.
Significance. If the workflow and examples are correctly documented and functional, this manuscript provides a useful practical contribution to the GN&C community by supplying a portable, reproducible Basilisk environment. The emphasis on containerization directly tackles a recurring barrier to consistent simulation setups across heterogeneous platforms, which can reduce setup time and improve research reproducibility. The detailed description of BSKSim architecture combined with concrete scenario examples strengthens its value as a reference implementation; the reproducible-code aspect via Docker is a clear strength that aligns with best practices in computational engineering.
minor comments (2)
- [Abstract] Abstract: the DOI link to the workshop presentation is provided but could be accompanied by a one-sentence statement of the specific extensions (e.g., additional scenarios or BSKSim details) added in the current manuscript.
- The manuscript would benefit from a short table or enumerated list summarizing the simulation scenarios by complexity level, key Basilisk modules used, and Docker-specific commands, to improve quick reference usability.
Simulated Author's Rebuttal
We thank the referee for the positive review and recommendation to accept the manuscript. The comments confirm that the Docker-based workflow and BSKSim examples address a practical need in the GN&C community for reproducible simulation environments.
Circularity Check
No significant circularity
full rationale
The manuscript is a descriptive workflow reference for Docker-based containerization of Basilisk GN&C simulations. It presents no equations, derivations, fitted parameters, predictions, or uniqueness theorems. All content consists of architectural descriptions, code patterns, and example scenarios that stand independently as implementation guidance. The single self-reference to a prior workshop presentation is non-load-bearing and does not underpin any claimed result. The paper is therefore self-contained with no reduction of outputs to inputs by construction.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclearThe presented workflow provides a self-contained implementation reference for GN&C engineers and researchers seeking reproducible and portable Basilisk simulation environments.
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclearDocker-based containerization workflow for Basilisk that encapsulates the complete build environment, dependencies, and simulation infrastructure within a portable container image.
Reference graph
Works this paper leans on
-
[1]
Basilisk:AFlexible,ScalableandModularAstrodynam- ics Simulation Framework
P.W.Kenneally,S.Piggott,andH.Schaub.“Basilisk:AFlexible,ScalableandModularAstrodynam- ics Simulation Framework”.Journal of Aerospace Information Systems17.9 (2020), pp. 496–507. doi:https://doi.org/10.2514/1.I010762
-
[2]
Flexible Basilisk astrodynamics visualizationsoftwareusingtheUnityrenderingengine
J. Wood, M. C. Margenet, P. Kenneally, H. Schaub, and S. Piggott. “Flexible Basilisk astrodynamics visualizationsoftwareusingtheUnityrenderingengine”.In:AASGuidanceandControlConference, Breckenridge, CO. 2018
work page 2018
-
[3]
Docker: Lightweight Linux Containers for Consistent Development and Deployment
D. Merkel. “Docker: Lightweight Linux Containers for Consistent Development and Deployment”. Linux j239.2 (2014), p. 2
work page 2014
-
[4]
AnIntroductiontoDockerandAnalysisofitsPerformance
B.B.Rad,H.J.Bhatti,andM.Ahmadi.“AnIntroductiontoDockerandAnalysisofitsPerformance”. International Journal of Computer Science and Network Security (IJCSNS)17.3 (2017), p. 228
work page 2017
-
[5]
Gupta.Basilisk and Docker for Streamlined GN&C Simulation
A. Gupta.Basilisk and Docker for Streamlined GN&C Simulation. Presentation at the 46th Rocky MountainAASGN&CConference.Breckenridge,CO,USA,2024.doi:10.5281/zenodo.15008785
-
[6]
An Introduction to Docker for Reproducible Research
C. Boettiger. “An Introduction to Docker for Reproducible Research”.ACM SIGOPS Operating Systems Review49.1 (2015), pp. 71–79.doi:https://doi.org/10.1145/2723872.2723882
-
[7]
A Study of How Docker Compose is used to Compose Multi-component Systems
I. M. Hasan, S. Mohammed, and A. E. Hassan. “A Study of How Docker Compose is used to Compose Multi-component Systems”.Empirical Software Engineering26.6 (2021).doi:https : //doi.org/10.1007/s10664-021-10025-1
-
[8]
Gupta.Basilisk and Docker for Reproducible GN&C Simulation
A. Gupta.Basilisk and Docker for Reproducible GN&C Simulation. Zenodo. 2026.doi:10.5281/ zenodo.20132421
work page 2026
-
[9]
TheGGM03mean earth gravity model from GRACE
B.Tapley,J.Ries,S.Bettadpur,D.Chambers,M.Cheng,F.Condi,andS.Poole.“TheGGM03mean earth gravity model from GRACE”. In:AGU Fall Meeting Abstracts. Vol. 2007. 2007, G42A–03
work page 2007
-
[10]
R. H. Battin.An Introduction to the Mathematics and Methods of Astrodynamics. AIAA, 1999.doi: https://doi.org/10.2514/4.861543
-
[11]
R. R. Bate, D. D. Mueller, J. E. White, and W. W. Saylor.Fundamentals of Astrodynamics. 2nd ed. Mineola, NY: Dover Publications, 2020
work page 2020
-
[12]
C. H. Acton.An Overview of SPICE.https://naif.jpl.nasa.gov/pub/naif/toolkit _docs/ Tutorials/pdf/individual_docs/03_spice_overview.pdf. 1998
work page 1998
-
[13]
Spice:AMeans for Determining Observation Geometry
C.Acton,N.Bachman,J.DiazDelRio,B.Semenov,E.Wright,andY.Yamamoto.“Spice:AMeans for Determining Observation Geometry”. In:EPSC–DPS Joint Meeting. Vol. 553. 2011. 20
work page 2011
-
[14]
M. Costa. “SPICE for ESA Planetary Missions: Geometry and Visualization Support to Studies, Operations and Data Analysis within Your Reach”. In:2018 SpaceOps Conference. 2018, p. 2553. doi:https://doi.org/10.2514/6.2018-2553
-
[15]
The Planetary and Lunar EphemeridesDE430andDE431
W. M. Folkner, J. G. Williams, D. H. Boggs, R. S. Park, and P. Kuchynka. “The Planetary and Lunar EphemeridesDE430andDE431”.InterplanetaryNetworkProgressReport196.1(2014),pp.42–196
work page 2014
-
[16]
H. Schaub and J. L. Junkins.Analytical Mechanics of Space Systems. 3rd ed. Reston, VA: AIAA, 2014. 21
work page 2014
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.