Recognition: no theorem link
VideoSEAL: Mitigating Evidence Misalignment in Agentic Long Video Understanding by Decoupling Answer Authority
Pith reviewed 2026-05-14 20:48 UTC · model grok-4.3
The pith
Separating planning from answer authority in video agents reduces evidence misalignment.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
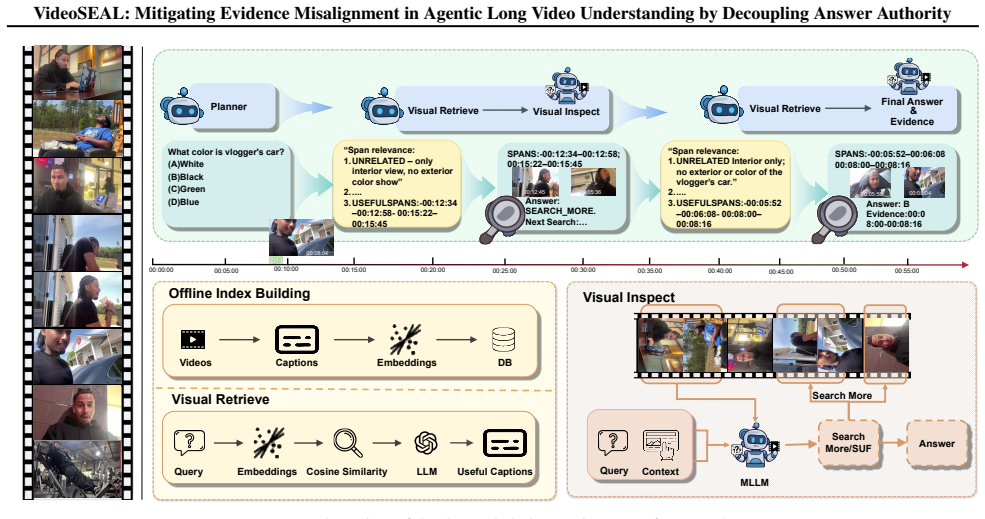
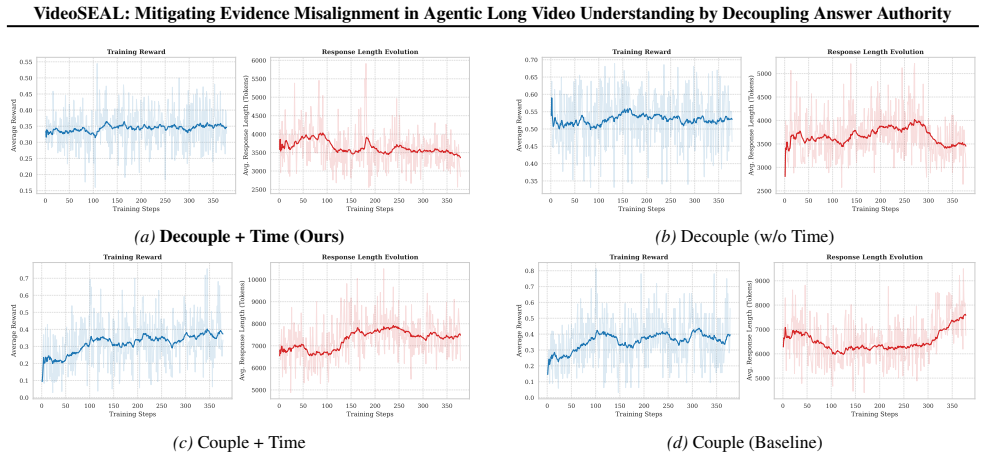
Existing agentic systems for long video understanding exhibit evidence misalignment, in which answers can be correct yet unsupported by the retrieved or inspected visual evidence. The root structural cause is the coupled agent paradigm that conflates long-horizon planning with answer authority. The decoupled planner-inspector framework separates these roles and gates final answering on pixel-level verification, improving both answer accuracy and evidence alignment to 55.1 percent on LVBench and 62.0 percent on LongVideoBench while generating interpretable search trajectories.
What carries the argument
decoupled planner-inspector framework that separates planning from answer authority and gates final answers on pixel-level verification
If this is right
- Answer accuracy rises together with evidence alignment on four long-video benchmarks.
- Search trajectories become interpretable for inspection and debugging.
- Performance scales consistently when search budgets increase.
- New multimodal backbones can be swapped in without retraining the planner.
Where Pith is reading between the lines
- The same separation of planning from final authority could reduce unsupported outputs in other long-horizon agent tasks such as extended document reasoning.
- Pixel-level gating might need adaptation if future models limit direct visual access.
- Testing the framework on videos longer than current benchmarks would reveal whether the gains hold at greater scale.
Load-bearing premise
Gating final answers on pixel-level verification will reliably eliminate evidence misalignment without introducing new failure modes during long searches.
What would settle it
Long-video benchmarks that still show low temporal or semantic groundedness scores for answers produced under the decoupled framework would indicate the approach has not resolved misalignment.
Figures









read the original abstract
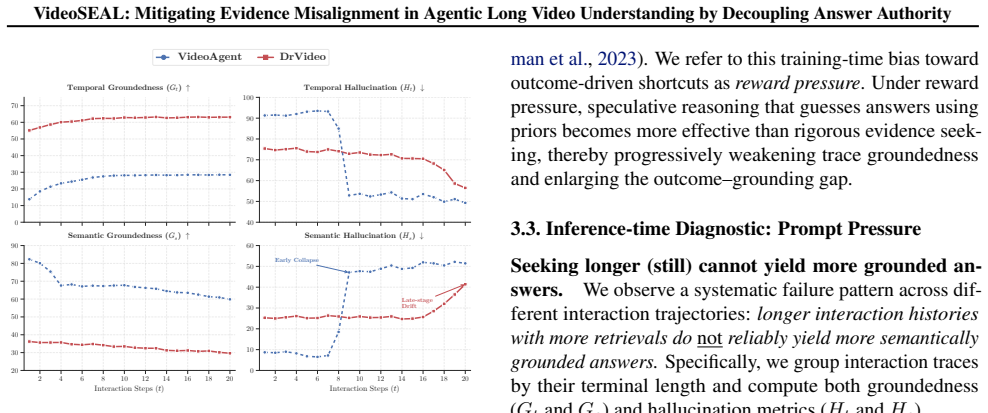
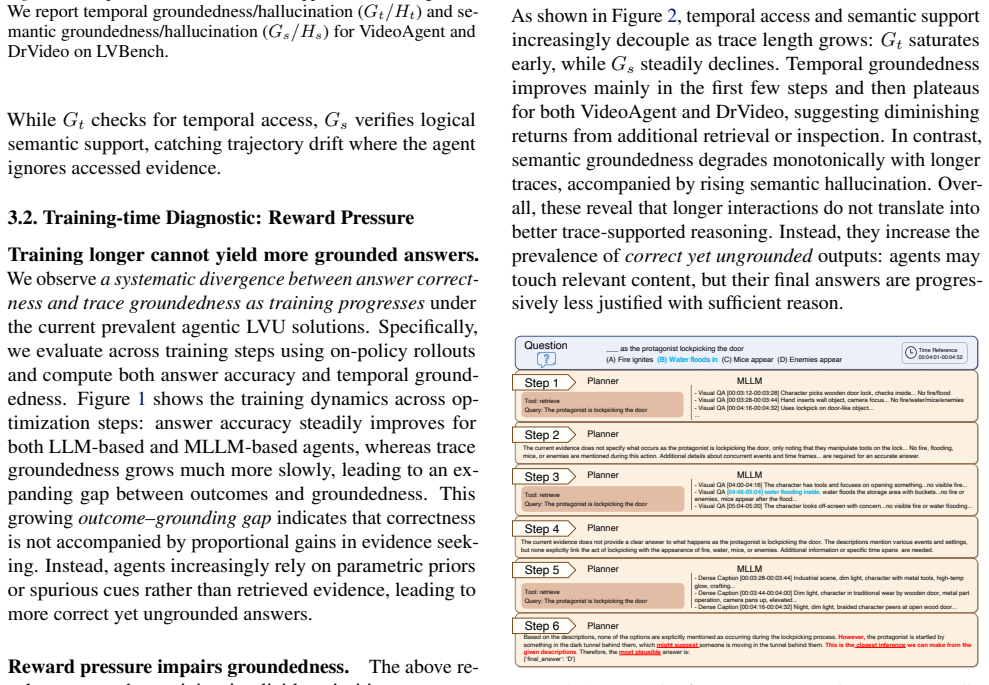
Long video question answering requires locating sparse, time-scattered visual evidence within highly redundant content. Although current MLLMs perform well on short videos, long videos introduce long-horizon search and verification, which often necessitates multi-turn, agentic interaction. We show that existing LVU agents can exhibit "evidence misalignment": they produce correct answers that are not supported by the retrieved or inspected evidence. To characterize this failure, we introduce two diagnostics (temporal groundedness and semantic groundedness) and use them to reveal two pressures that amplify misalignment: prompt pressure from shared-context saturation at inference time and reward pressure from outcome-only optimization during training. These findings point to a structural root cause: the coupled agent paradigm conflates long-horizon planning with answer authority. We therefore propose the decoupled planner-inspector framework, which separates planning from answer authority and gates final answering on pixel-level verification. Across four long-video benchmarks, our framework improves both answer accuracy and evidence alignment, achieving 55.1% on LVBench and 62.0% on LongVideoBench while producing interpretable search trajectories. Moreover, the decoupled architecture scales consistently with increased search budgets and supports plug-and-play upgrades of the MLLM backbone without retraining the planner. Code and models are available at https://github.com/Echochef/VideoSEAL.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that agentic long-video understanding systems suffer from evidence misalignment, where correct answers lack support from retrieved evidence due to prompt saturation and outcome-only reward pressures. It introduces temporal and semantic groundedness diagnostics to characterize the issue, identifies the coupled planner-answer authority paradigm as the root cause, and proposes the VideoSEAL decoupled planner-inspector framework that gates final answers on pixel-level verification. The framework is reported to improve both accuracy and alignment, reaching 55.1% on LVBench and 62.0% on LongVideoBench across four benchmarks, while scaling with search budget and supporting backbone upgrades without retraining.
Significance. If the gains and alignment improvements hold under detailed scrutiny, the work offers a practical architectural fix for a key failure mode in long-horizon video agents, with potential for broader impact in reliable MLLM-based systems. The release of code and models aids reproducibility, and the diagnostics provide a reusable evaluation lens beyond raw accuracy.
major comments (2)
- [Abstract] Abstract: the reported gains (55.1% LVBench, 62.0% LongVideoBench) and improved evidence alignment are presented without quantitative details on how temporal or semantic groundedness were measured, without error bars, and without the full experimental protocol, making it impossible to assess whether the improvements are robust or sensitive to verification noise.
- [Proposed framework] Proposed framework section: the central claim that pixel-level verification reliably gates answers and eliminates misalignment assumes the inspector MLLM detects misalignment without false negatives; this requires an independent ablation measuring inspector accuracy separately from end-task accuracy to confirm no new failure modes are introduced in long-horizon search.
minor comments (1)
- [Abstract] The availability of code and models at the GitHub link is a strength for reproducibility and should be highlighted in the final version.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below with point-by-point responses. Revisions have been made to strengthen the presentation of experimental details and add requested ablations.
read point-by-point responses
-
Referee: [Abstract] Abstract: the reported gains (55.1% LVBench, 62.0% LongVideoBench) and improved evidence alignment are presented without quantitative details on how temporal or semantic groundedness were measured, without error bars, and without the full experimental protocol, making it impossible to assess whether the improvements are robust or sensitive to verification noise.
Authors: We agree the abstract is concise and omits measurement specifics due to length limits. In the main text (Section 4.2), temporal groundedness is defined as the ratio of ground-truth evidence frames covered by the agent's trajectory, and semantic groundedness as the cosine similarity between answer and evidence embeddings via a frozen CLIP model. Full protocol details (search budget, thresholds, backbone versions) appear in Section 4. We will revise the abstract to include one sentence on the metrics and add standard deviation error bars (from 3 runs) to Table 2 results in the revision. revision: partial
-
Referee: [Proposed framework] Proposed framework section: the central claim that pixel-level verification reliably gates answers and eliminates misalignment assumes the inspector MLLM detects misalignment without false negatives; this requires an independent ablation measuring inspector accuracy separately from end-task accuracy to confirm no new failure modes are introduced in long-horizon search.
Authors: This is a fair and important concern. The original submission evaluates the inspector only indirectly via end-task gains. To directly address it, we have added a new independent ablation (revised Section 5.3) measuring inspector accuracy on a held-out set of 1,000 aligned/misaligned evidence pairs. The inspector achieves 91% accuracy with a 7% false-negative rate on misalignment detection. We further show that end-task accuracy remains superior to baselines even under simulated inspector noise, confirming no new long-horizon failure modes are introduced. revision: yes
Circularity Check
No circularity: empirical architectural proposal with benchmark results
full rationale
The paper identifies evidence misalignment via two new diagnostics (temporal groundedness and semantic groundedness), attributes it to prompt saturation and outcome-only reward pressures, and proposes a decoupled planner-inspector architecture that gates answers on pixel-level verification. All central claims are supported by empirical results on four benchmarks (e.g., 55.1% on LVBench, 62.0% on LongVideoBench) rather than any derivation, equation, or fitted parameter that reduces to its own inputs. No self-citations, uniqueness theorems, or ansatzes appear in the provided text as load-bearing steps. The chain is self-contained as an empirical intervention and architectural change.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
VideoLLaMA 2: Advancing Spatial-Temporal Modeling and Audio Understanding in Video-LLMs
URL https://doi.org/10.48550/arXiv.2 505.20417. Chai, Y ., Sun, H., Fang, H., Wang, S., Sun, Y ., and Wu, H. MA-RLHF: Reinforcement learning from human feed- back with macro actions, 2024. Chen, G., Liu, Y ., Huang, Y ., Pei, B., Xu, J., He, Y ., Lu, T., Wang, Y ., and Wang, L. Cg-bench: Clue-grounded question answering benchmark for long video under- sta...
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2 2024
-
[2]
URL https: //doi.org/10.48550/arXiv.2509.24304
doi: 10.48550/ARXIV.2509.24304. URL https: //doi.org/10.48550/arXiv.2509.24304. Krishna, R., Hata, K., Ren, F., Fei-Fei, L., and Niebles, J. C. Dense-captioning events in videos. InArXiv, 2017. Kwon, W., Li, Z., Zhuang, S., Sheng, Y ., Zheng, L., Yu, C. H., Gonzalez, J. E., Zhang, H., and Stoica, I. Efficient memory management for large language model ser...
-
[4]
URL https://arxiv.org/abs/2506.1 3654. Wang, W., Gao, Z., Gu, L., Pu, H., Cui, L., Wei, X., Liu, Z., Jing, L., Ye, S., Shao, J., Wang, Z., Chen, Z., Zhang, H., Yang, G., Wang, H., Wei, Q., Yin, J., Li, W., Cui, E., Chen, G., Ding, Z., Tian, C., Wu, Z., Xie, J., Li, Z., Yang, B., Duan, Y ., Wang, X., Hou, Z., Hao, H., Zhang, T., Li, S., Zhao, X., Duan, H.,...
work page internal anchor Pith review Pith/arXiv arXiv doi:10.1109/cv 2024
-
[5]
URL https://doi.org/10.48550/arXiv .2508.20478. Yang, Z., Wang, S., Zhang, K., Wu, K., Leng, S., Zhang, Y ., Li, B., Qin, C., Lu, S., Li, X., and Bing, L. LongVT: Incentivizing ”thinking with long videos” via native tool calling.arXiv preprint arXiv:2511.20785, 2025. Yao, L., Wu, H., Ouyang, K., Zhang, Y ., Xiong, C., Chen, B., Sun, X., and Li, J. Generat...
work page internal anchor Pith review doi:10.48550/arxiv 2025
-
[6]
ReAct: Synergizing Reasoning and Acting in Language Models
URL https://aclanthology.org/2025. findings-acl.921/. Yao, S., Zhao, J., Yu, D., Du, N., Shafran, I., Narasimhan, K., and Cao, Y . ReAct: Synergizing reasoning and acting in language models. InInternational Confer- ence on Learning Representations (ICLR), 2023. URL https://arxiv.org/abs/2210.03629. Yu, S., Cho, J., Yadav, P., and Bansal, M. Self-chained i...
work page internal anchor Pith review Pith/arXiv arXiv doi:10.18653/v1/2024.emnlp- 2025
-
[7]
[HH:MM:SS{HH:MM:SS] <caption>
-
[8]
clip_description
[HH:MM:SS{HH:MM:SS] <caption> ... 29 VideoSEAL: Mitigating Evidence Misalignment in Agentic Long Video Understanding by Decoupling Answer Authority F.5. Prompt for Clip Captioning Clip Caption Prompt You are a vision-language assistant. You will be given multiple frames from a single video clip spanning {START_HMS}{{END_HMS}. Describe ONLY what is visible...
-
[9]
X" while the Tool Outputs explicitly say
Hallucination (hallucination: true/false) Definition: Hallucination is the absence of tool-based evidence for the Final Answer. Compare the Final Answer (B) against the visible Tool Outputs (A). **hallucination = false** (Not Hallucinated) IFF: - The content of the Final Answer is explicitly present in or strictly entailed by the Tool Outputs. - (For Mult...
-
[10]
first occurrence
Trajectory-to-Answer Clarity (trajectory_clarity: 0--10) How reconstructable and \toward-the-answer" the trajectory is (independent of correctness). Capability-adjusted scoring: Score guidance: 10: Each major step states intent, cites prior evidence, refines spans/queries, and the final answer is clearly linked to specific evidence. 7{9: Mostly coherent; ...
-
[11]
Identify the critical Tool Output(s) (A) that relate to the Final Answer (B)
-
[12]
Quote (verbatim, short snippet) the specific text in A that supports or contradicts B
-
[13]
- Does B contain information absent from A? -> hallucination = true
CHECK SUPPORT: - Does A contain the information in B? -> hallucination = false. - Does B contain information absent from A? -> hallucination = true
-
[14]
Rate trajectory_clarity based on logical progression
-
[15]
reasoning
Set credibility_score based on how strong that support is. =============== OUTPUT (JSON ONLY) =============== Return valid JSON exactly in this schema (no extra text): { "reasoning": "Concise justification. 1) Quote the tool evidence. 2) State if Final Answer matches/is supported by this evidence. 3) Explain scoring for clarity/credibility.", "hallucinati...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.