Recognition: 3 theorem links
· Lean TheoremImproving Diffusion Posterior Samplers with Lagged Temporal Corrections for Image Restoration
Pith reviewed 2026-05-14 20:43 UTC · model grok-4.3
The pith
LAMP improves diffusion posterior sampling by adding a lagged temporal correction from second-order discretization while preserving the posterior structure.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
LAMP merges the second-order discretization of the diffusion reverse process with the residual correction that enforces data consistency in posterior sampling, thereby inheriting a lagged temporal correction that preserves the overall structure of a posterior sampler and improves the transition step via a bias-variance tradeoff.
What carries the argument
The LAMP update rule, formed by replacing the first-order discretization in a posterior sampler with its second-order counterpart while retaining the data-consistency residual term.
If this is right
- LAMP can be inserted as a modular plug-in into existing posterior sampling backbones without altering their structure.
- The one-step risk analysis identifies conditions under which the bias-variance tradeoff favors LAMP over standard first-order updates.
- Performance gains appear consistently across imaging inverse problems without requiring additional denoising evaluations.
Where Pith is reading between the lines
- Similar lagged corrections could be tested in diffusion models for video or temporal data where consecutive estimates vary smoothly.
- Extending the risk analysis from one step to the full trajectory would clarify stability over long reverse paths.
- The modular design suggests LAMP could be combined with other acceleration techniques that also operate on consecutive estimates.
Load-bearing premise
The second-order discretization term remains stable and beneficial across the full reverse trajectory when combined with the residual correction.
What would settle it
A full-trajectory experiment on a standard imaging benchmark where LAMP increases error or artifacts relative to the unmodified posterior sampler would falsify the claimed improvement.
Figures







read the original abstract
Diffusion-based posterior sampling (PS) is a leading framework for imaging inverse problems, combining learned priors with measurement constraints. Yet, its standard formulations rely on instantaneous data-consistent estimates, which induce temporal variability in the reverse dynamics. We reinterpret PS from a dynamical perspective, showing that the standard PS update corresponds to a first-order discretization of the diffusion dynamics plus a residual correction capturing the mismatch between the denoised prediction and the data-consistent estimate. A second-order discretization, however, naturally introduces a temporal correction based on the variation of consecutive estimates. Building on this, we propose LAMP, combining the second-order update with the residual correction characterizing a PS technique. LAMP thus inherits a lagged temporal correction, and it can be implemented as a modular plug-in over the PS backbone. We show that LAMP preserves the structure of a posterior sampler, and we perform a one-step risk analysis to characterize when LAMP improves the reverse transition via a bias-variance trade-off. Experiments across multiple imaging tasks demonstrate consistent improvements over strong baselines such as DiffPIR and DDRM, without increasing the number of denoising evaluations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper reinterprets standard diffusion posterior sampling (PS) updates as a first-order discretization of the reverse dynamics plus a residual correction for data consistency. It proposes LAMP, which augments this with a second-order discretization term to introduce a lagged temporal correction, shows that LAMP preserves the posterior-sampler structure, derives a one-step risk analysis establishing a bias-variance improvement, and reports consistent empirical gains over DiffPIR and DDRM on multiple image restoration tasks without extra denoising network evaluations.
Significance. If the multi-step behavior matches the one-step analysis, LAMP supplies a modular, zero-cost plug-in that improves existing PS backbones with a clean dynamical-systems interpretation and a bias-variance justification; the absence of additional function evaluations is a practical strength.
major comments (3)
- [§4] §4 (one-step risk analysis): the bias-variance characterization is derived only for a single reverse step; no multi-step error-propagation bound or stability argument is supplied for the combined lagged residual over the full trajectory of hundreds of steps, leaving open whether accumulated discretization drift or residual mismatch can erase the reported one-step gain.
- [§3.2] §3.2 (LAMP definition): the claim that LAMP 'preserves the structure of a posterior sampler' is stated after the update rule, but the proof sketch does not explicitly verify that the lagged correction term remains a valid data-consistency operator when the second-order term is active across varying noise levels.
- [Experiments] Experiments section: reported gains are shown without error bars, without stating the number of random seeds, and without specifying how many distinct inverse problems or measurement operators were used; this weakens the claim of 'consistent improvements' relative to the one-step analysis.
minor comments (2)
- Notation for the lagged correction term is introduced without a clear forward reference to its implementation cost (zero extra network calls).
- Figure captions could more explicitly label which curves correspond to the one-step analysis versus full-trajectory results.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and outline targeted revisions to strengthen the manuscript.
read point-by-point responses
-
Referee: [§4] §4 (one-step risk analysis): the bias-variance characterization is derived only for a single reverse step; no multi-step error-propagation bound or stability argument is supplied for the combined lagged residual over the full trajectory of hundreds of steps, leaving open whether accumulated discretization drift or residual mismatch can erase the reported one-step gain.
Authors: We agree that the risk analysis is performed for a single reverse step. The one-step characterization is intentional, as it isolates the bias-variance trade-off introduced by the lagged correction. Empirical results across full trajectories (hundreds of steps) on multiple tasks show consistent gains without evidence of drift or instability. In revision we will add a short discussion section on multi-step behavior, including a brief numerical study of residual accumulation under the LAMP update, to better connect the one-step analysis to observed performance. revision: partial
-
Referee: [§3.2] §3.2 (LAMP definition): the claim that LAMP 'preserves the structure of a posterior sampler' is stated after the update rule, but the proof sketch does not explicitly verify that the lagged correction term remains a valid data-consistency operator when the second-order term is active across varying noise levels.
Authors: The lagged correction is constructed directly from the same data-consistency residual used in standard PS methods; the second-order term is a linear extrapolation that does not alter the measurement-matching property at each noise level. We will expand the proof sketch (currently in the appendix) to explicitly verify that the composite operator remains a valid data-consistency map for arbitrary sigma schedules, including a short inductive argument over consecutive steps. revision: yes
-
Referee: [Experiments] Experiments section: reported gains are shown without error bars, without stating the number of random seeds, and without specifying how many distinct inverse problems or measurement operators were used; this weakens the claim of 'consistent improvements' relative to the one-step analysis.
Authors: We accept this observation. The revised manuscript will report results with error bars computed over 5 independent random seeds, explicitly state the seed count, and detail the exact number of distinct inverse problems (four restoration tasks) together with the measurement operators employed for each task. revision: yes
Circularity Check
No significant circularity; derivation self-contained
full rationale
The paper reinterprets standard PS updates as first-order discretization plus residual correction, defines LAMP as the modular combination of second-order discretization with that residual, verifies posterior-sampler structure preservation directly from the construction, and supplies an independent one-step risk analysis for the claimed bias-variance improvement. No equation reduces to a fitted input renamed as prediction, no load-bearing premise rests on self-citation, and no ansatz or uniqueness claim is smuggled via prior work by the same authors. The multi-step stability concern raised by the skeptic is a question of empirical reach, not a definitional collapse of the derivation chain.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The reverse diffusion process can be discretized to second order while preserving the data-consistency property of posterior sampling.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
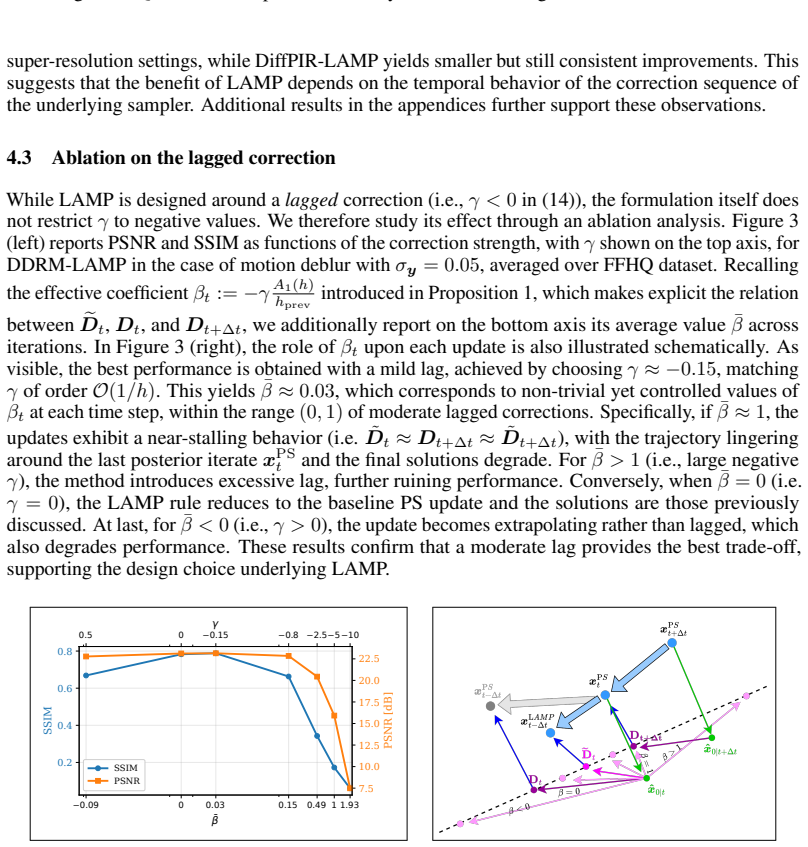
LAMP update xLAMP_{t−Δt} := x2M_{t−Δt} + α_{t−Δt} e^{-h} (Dt − x̂0|t) … eDt = (1−βt)Dt + βt Dt+Δt (Prop. 1)
-
IndisputableMonolith/Foundation/AlphaCoordinateFixation.leanJ_uniquely_calibrated_via_higher_derivative unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
one-step risk comparison … βt ∥rt∥² < 2(1−βt)(1−ρt) tr(Σt) (Prop. 2)
-
IndisputableMonolith/Foundation/DimensionForcing.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
second-order discretization … A1(h) ≈ h²/2 … lagged temporal correction
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Hyungjin Chung, Jeongsol Kim, Michael T. McCann, Marc L. Klasky, and Jong Chul Ye. Diffusion posterior sampling for general noisy inverse problems. InInternational Conference on Learning Representations (ICLR), 2023
work page 2023
-
[2]
Hyungjin Chung, Byeongsu Sim, Dohoon Ryu, and Jong Chul Ye. Improving diffusion models for inverse problems using manifold constraints.Advances in Neural Information Processing Systems, 35:25683–25696, 2022
work page 2022
-
[3]
Diffusion models beat gans on image synthesis
Prafulla Dhariwal and Alex Nichol. Diffusion models beat gans on image synthesis. InNeurIPS, 2021
work page 2021
-
[4]
Denoising diffusion probabilistic models
Jonathan Ho, Ajay Jain, and Pieter Abbeel. Denoising diffusion probabilistic models. In Advances in Neural Information Processing Systems, 2020
work page 2020
-
[5]
Denoising diffusion restoration models
Bahjat Kawar, Michael Elad, Stefano Ermon, and Jiaming Song. Denoising diffusion restoration models. InAdvances in Neural Information Processing Systems (NeurIPS), 2022
work page 2022
-
[6]
Snips: Solving noisy inverse problems stochastically
Bahjat Kawar et al. Snips: Solving noisy inverse problems stochastically. InNeurIPS, 2021
work page 2021
-
[7]
Pseudo numerical methods for diffusion models on manifolds
Luping Liu, Yi Ren, Zhijie Lin, and Zhou Zhao. Pseudo numerical methods for diffusion models on manifolds. InICLR, 2022
work page 2022
-
[8]
Dpm-solver++: Fast solver for guided sampling
Cheng Lu, Yuhao Zhou, Fan Bao, Jianfei Chen, Chongxuan Li, and Jun Zhu. Dpm-solver++: Fast solver for guided sampling. InarXiv preprint, 2022
work page 2022
-
[9]
Dpm-solver++: Fast solver for guided sampling of diffusion probabilistic models
Cheng Lu, Yuhao Zhou, Fan Bao, Jianfei Chen, Chongxuan Li, and Jun Zhu. Dpm-solver++: Fast solver for guided sampling of diffusion probabilistic models. InAdvances in Neural Information Processing Systems (NeurIPS), 2022. 9
work page 2022
-
[10]
Deep unsuper- vised learning using nonequilibrium thermodynamics.ICML, 2015
Jascha Sohl-Dickstein, Eric Weiss, Niru Maheswaranathan, and Surya Ganguli. Deep unsuper- vised learning using nonequilibrium thermodynamics.ICML, 2015
work page 2015
-
[11]
Denoising diffusion implicit models
Jiaming Song, Chenlin Meng, and Stefano Ermon. Denoising diffusion implicit models. In International Conference on Learning Representations, 2021
work page 2021
-
[12]
Kingma, Abhishek Kumar, Stefano Ermon, and Ben Poole
Yang Song, Jascha Sohl-Dickstein, Diederik P. Kingma, Abhishek Kumar, Stefano Ermon, and Ben Poole. Score-based generative modeling through stochastic differential equations. In International Conference on Learning Representations, 2021
work page 2021
-
[13]
Statistical properties of inverse gaussian distributions
Maurice CK Tweedie. Statistical properties of inverse gaussian distributions. i.The Annals of Mathematical Statistics, 28(2):362–377, 1957
work page 1957
-
[14]
Zero-shot image restoration using denoising diffusion null-space model
Yinhuai Wang, Jiwen Yu, and Jian Zhang. Zero-shot image restoration using denoising diffusion null-space model. InInternational Conference on Learning Representations, 2023
work page 2023
-
[15]
Jay Whang, Mauricio Delbracio, Hossein Talebi, Chitwan Saharia, Alexandros G. Dimakis, and Peyman Milanfar. Deblurring via stochastic refinement. InIEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2022
work page 2022
-
[16]
Fast sampling of diffusion models with exponential integrator.arXiv preprint, 2023
Qinsheng Zhang et al. Fast sampling of diffusion models with exponential integrator.arXiv preprint, 2023
work page 2023
-
[17]
Denoising diffusion models for plug-and-play image restoration
Yuanzhi Zhu, Kai Zhang, Jingyun Liang, Jiezhang Cao, Bihan Wen, Radu Timofte, and Luc Van Gool. Denoising diffusion models for plug-and-play image restoration. InIEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2023. 10 A Definition of the Measurement-Aware Estimate for DiffPIR and DDRM This section describes how the measurement-awar...
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.