Recognition: unknown
Revealing Interpretable Failure Modes of VLMs
Pith reviewed 2026-05-14 20:24 UTC · model grok-4.3
The pith
REVELIO uncovers interpretable concept compositions that cause consistent failures in vision-language models.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
REVELIO defines a failure mode as any composition of interpretable, domain-relevant concepts under which a target VLM consistently behaves incorrectly, then solves the exponential search problem by running diversity-aware beam search to map the failure landscape and Gaussian-process Thompson Sampling to explore more complex modes, and applies the procedure to autonomous-driving and indoor-robotics settings to expose previously unreported vulnerabilities such as weak spatial grounding that produces simulated crashes and either missed hazards or excessive false alarms that reduce efficiency.
What carries the argument
REVELIO framework that combines diversity-aware beam search and Gaussian-process Thompson Sampling to explore combinatorial spaces of concepts for VLM failure modes.
Load-bearing premise
The concept compositions returned by the search correspond to genuine, consistent real-world failure modes rather than artifacts created by the search heuristics.
What would settle it
Execute the VLMs on high-fidelity simulations or physical deployments that instantiate exactly the same concept combinations reported by REVELIO and measure whether the predicted error rate actually appears.
Figures







read the original abstract
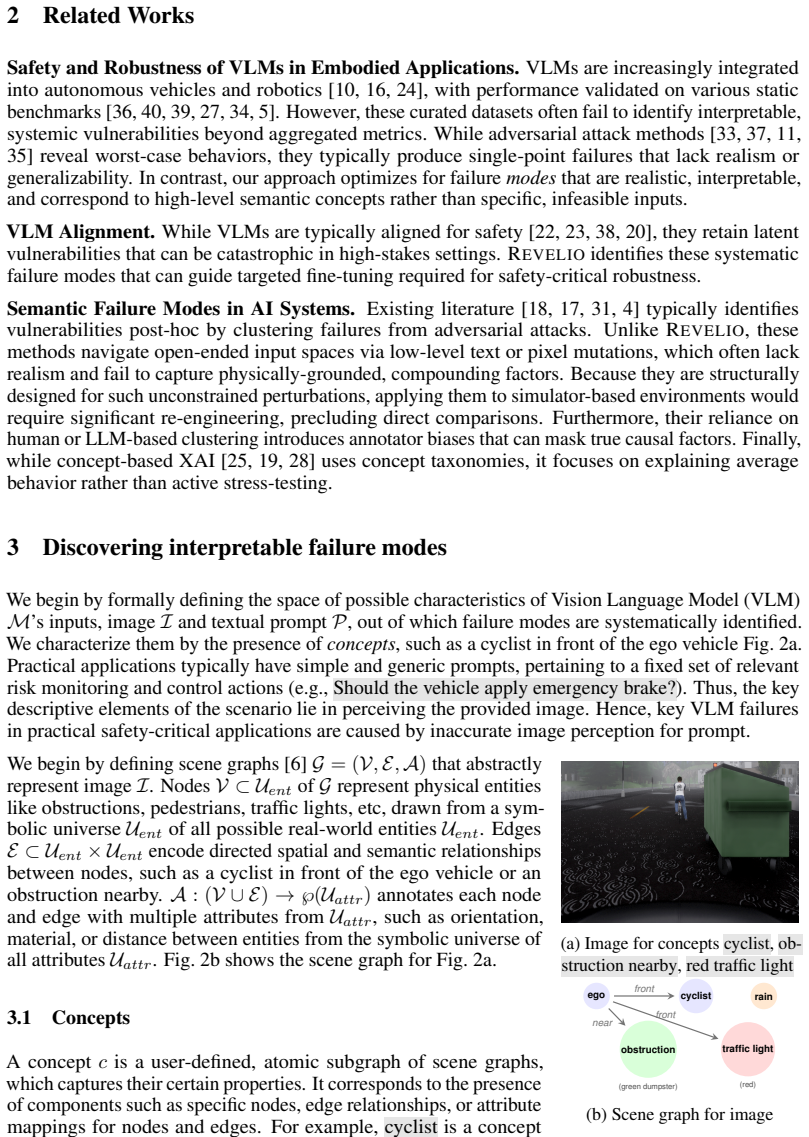
Vision-Language Models (VLMs) are increasingly used in safety-critical applications because of their broad reasoning capabilities and ability to generalize with minimal task-specific engineering. Despite these advantages, they can exhibit catastrophic failures in specific real-world situations, constituting failure modes. We introduce REVELIO, a framework for systematically uncovering interpretable failure modes in VLMs. We define a failure mode as a composition of interpretable, domain-relevant concepts-such as pedestrian proximity or adverse weather conditions-under which a target VLM consistently behaves incorrectly. Identifying such failures requires searching over an exponentially large discrete combinatorial space. To address this challenge, REVELIO combines two search procedures: a diversity-aware beam search that efficiently maps the failure landscape, and a Gaussian-process Thompson Sampling strategy that enables broader exploration of complex failure modes. We apply REVELIO to autonomous driving and indoor robotics domains, uncovering previously unreported vulnerabilities in state-of-the-art VLMs. In driving environments, the models often demonstrate weak spatial grounding and fail to account for major obstructions, leading to recommendations that would result in simulated crashes. In indoor robotics tasks, VLMs either miss safety hazards or behave excessively conservatively, producing false alarms and reducing operational efficiency. By identifying structured and interpretable failure modes, REVELIO offers actionable insights that can support targeted VLM safety improvements.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces REVELIO, a framework that combines diversity-aware beam search and Gaussian-process Thompson Sampling to search over compositions of interpretable concepts (e.g., pedestrian proximity + adverse weather) and thereby uncover failure modes in VLMs. Applied to simulated autonomous-driving and indoor-robotics environments, the method is claimed to reveal previously unreported vulnerabilities such as weak spatial grounding that produces simulated crashes and overly conservative or missed-hazard behaviors that produce false alarms.
Significance. If the discovered failure modes prove reproducible and transferable beyond the chosen simulators and concept vocabularies, the work would provide a valuable systematic tool for safety analysis of VLMs in critical applications, moving beyond ad-hoc prompting or manual testing.
major comments (3)
- [Abstract / Experiments] Abstract and Experiments: the central claim that REVELIO uncovers 'consistent' failures is unsupported by any reported quantitative threshold (e.g., failure rate across repeated trials), statistical test, or error bars; only qualitative descriptions of 'simulated crashes' and 'false alarms' are given.
- [Method] Method: the two search procedures introduce free hyperparameters (beam width, diversity parameters, Thompson-sampling acquisition parameters) whose influence on the discovered modes is not ablated; without such controls it is unclear whether the reported modes are robust or artifacts of the chosen search bias.
- [Experiments] Experiments: no transfer experiments to real sensor data, physical robots, or out-of-distribution concept combinations are presented, leaving open the possibility that the identified modes are simulation-specific rather than intrinsic VLM weaknesses.
minor comments (1)
- [Method] The precise definition of a 'failure mode' (a concept composition under which the VLM 'consistently behaves incorrectly') would benefit from an explicit mathematical formulation or pseudocode in the method section.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment point by point below, with revisions made where the manuscript can be strengthened without misrepresenting the work.
read point-by-point responses
-
Referee: [Abstract / Experiments] Abstract and Experiments: the central claim that REVELIO uncovers 'consistent' failures is unsupported by any reported quantitative threshold (e.g., failure rate across repeated trials), statistical test, or error bars; only qualitative descriptions of 'simulated crashes' and 'false alarms' are given.
Authors: We agree that the original presentation relied primarily on qualitative descriptions. In the revised manuscript we now report failure rates over five independent trials per mode, include standard error bars, and define 'consistent' explicitly as failure in at least 70 % of trials. These additions are placed in the Experiments section and referenced in the abstract. revision: yes
-
Referee: [Method] Method: the two search procedures introduce free hyperparameters (beam width, diversity parameters, Thompson-sampling acquisition parameters) whose influence on the discovered modes is not ablated; without such controls it is unclear whether the reported modes are robust or artifacts of the chosen search bias.
Authors: We acknowledge the value of sensitivity analysis. The chosen hyperparameter settings were guided by preliminary runs balancing coverage and compute. The revision adds an ablation subsection (and supplementary figures) varying beam width (5–20), diversity weight (0.1–0.5), and Thompson-sampling beta (0.1–1.0). The top-ranked failure modes remain stable across these ranges, supporting that they are not artifacts of a single bias setting. revision: yes
-
Referee: [Experiments] Experiments: no transfer experiments to real sensor data, physical robots, or out-of-distribution concept combinations are presented, leaving open the possibility that the identified modes are simulation-specific rather than intrinsic VLM weaknesses.
Authors: This is a legitimate scope limitation. The current study deliberately uses controlled simulators to enable large-scale combinatorial search that would be unsafe or prohibitively expensive in the real world. We have expanded the Discussion to state this limitation explicitly, note that the discovered modes (weak spatial grounding, over-conservative hazard response) align with independently reported VLM shortcomings, and outline planned sim-to-real validation as future work. No new transfer experiments are added at this revision. revision: partial
Circularity Check
No circularity: REVELIO's search procedures are general techniques applied empirically
full rationale
The paper defines failure modes as compositions of domain concepts and presents REVELIO as the combination of diversity-aware beam search plus Gaussian-process Thompson Sampling to explore the combinatorial space. These are introduced as algorithmic search methods without any derivation that reduces to fitted parameters defined on the same data, self-citation chains, or ansatzes smuggled from prior work. Results consist of empirical applications to simulated driving and robotics environments, with no load-bearing step that equates a claimed prediction to its own inputs by construction. The framework is self-contained against external benchmarks as a discovery tool rather than a closed-form derivation.
Axiom & Free-Parameter Ledger
free parameters (2)
- beam width and diversity parameters
- Thompson sampling acquisition parameters
axioms (1)
- domain assumption Failure modes of VLMs can be decomposed into compositions of interpretable, domain-relevant concepts
Reference graph
Works this paper leans on
-
[1]
Claude Sonnet
Anthropic. Claude Sonnet. https://www.anthropic.com/claude/sonnet, 2025. Ac- cessed: 2026-03-07
2025
-
[2]
Large language model-assisted autonomous vehicle recovery from immobilization, 2025
Zhipeng Bao and Qianwen Li. Large language model-assisted autonomous vehicle recovery from immobilization, 2025
2025
-
[3]
The use of mmr, diversity-based reranking for reordering documents and producing summaries
Jaime Carbonell and Jade Goldstein. The use of mmr, diversity-based reranking for reordering documents and producing summaries. InProceedings of the 21st Annual International ACM SIGIR Conference on Research and Development in Information Retrieval, SIGIR ’98, page 335–336, New York, NY , USA, 1998. Association for Computing Machinery
1998
-
[4]
Gonzalez, and Ion Stoica
Mert Cemri, Melissa Z Pan, Shuyi Yang, Lakshya A Agrawal, Bhavya Chopra, Rishabh Tiwari, Kurt Keutzer, Aditya Parameswaran, Dan Klein, Kannan Ramchandran, Matei Zaharia, Joseph E. Gonzalez, and Ion Stoica. Why do multi-agent LLM systems fail? InNeurIPS 2025 Workshop on Evaluating the Evolving LLM Lifecycle: Benchmarks, Emergent Abilities, and Scaling, 2025
2025
-
[5]
Kevin Kai-Chun Chang, Ekin Beyazit, Alberto Sangiovanni-Vincentelli, Tichakorn Wongpirom- sarn, and Sanjit A. Seshia. Scenicrules: An autonomous driving benchmark with multi-objective specifications and abstract scenarios, 2026
2026
-
[6]
A comprehensive survey of scene graphs: Generation and application.IEEE Transactions on Pattern Analysis and Machine Intelligence, 45(1):1–26, January 2023
Xiaojun Chang, Pengzhen Ren, Pengfei Xu, Zhihui Li, Xiaojiang Chen, and Alex Hauptmann. A comprehensive survey of scene graphs: Generation and application.IEEE Transactions on Pattern Analysis and Machine Intelligence, 45(1):1–26, January 2023
2023
-
[7]
Lumos: Let there be language model system certification, 2025
Isha Chaudhary, Vedaant Jain, Avaljot Singh, Kavya Sachdeva, Sayan Ranu, and Gagandeep Singh. Lumos: Let there be language model system certification, 2025
2025
-
[8]
Carla: An open urban driving simulator, 2017
Alexey Dosovitskiy, German Ros, Felipe Codevilla, Antonio Lopez, and Vladlen Koltun. Carla: An open urban driving simulator, 2017
2017
-
[9]
Vlmevalkit: An open-source toolkit for evaluating large multi-modality models
Haodong Duan, Junming Yang, Yuxuan Qiao, Xinyu Fang, Lin Chen, Yuan Liu, Xiaoyi Dong, Yuhang Zang, Pan Zhang, Jiaqi Wang, et al. Vlmevalkit: An open-source toolkit for evaluating large multi-modality models. InProceedings of the 32nd ACM International Conference on Multimedia, pages 11198–11201, 2024. 10
2024
-
[11]
Towards trustworthy autonomous vehicles with vision-language models under targeted and untargeted adversarial attacks
Awal Ahmed Fime, Md Zarif Hossain, Saika Zaman, Abdur R Shahid, and Ahmed Imteaj. Towards trustworthy autonomous vehicles with vision-language models under targeted and untargeted adversarial attacks. In2025 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), pages 619–628, 2025
2025
-
[12]
Fremont, Tommaso Dreossi, Shromona Ghosh, Xiangyu Yue, Alberto L
Daniel J. Fremont, Tommaso Dreossi, Shromona Ghosh, Xiangyu Yue, Alberto L. Sangiovanni- Vincentelli, and Sanjit A. Seshia. Scenic: a language for scenario specification and scene generation. InProceedings of the 40th ACM SIGPLAN Conference on Programming Language Design and Implementation, PLDI ’19, page 63–78. ACM, June 2019
2019
-
[13]
Google Gemini Team. Gemini 2.5: Pushing the frontier with advanced reasoning, multimodality, long context, and next generation agentic capabilities.arXiv preprint arXiv:2507.06261, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[14]
Gemini 3 flash model card
Google DeepMind. Gemini 3 flash model card. https://storage.googleapis.com/ deepmind-media/Model-Cards/Gemini-3-Flash-Model-Card.pdf , 2025. Accessed: 2026-05-01
2025
-
[15]
Gemini 3 pro model card
Google DeepMind. Gemini 3 pro model card. https://storage.googleapis.com/ deepmind-media/Model-Cards/Gemini-3-Pro-Model-Card.pdf , 2025. Accessed: 2026-02-24
2025
-
[16]
Lit: Large language model driven intention tracking for proactive human-robot collaboration – a robot sous-chef application, 2024
Zhe Huang, John Pohovey, Ananya Yammanuru, and Katherine Driggs-Campbell. Lit: Large language model driven intention tracking for proactive human-robot collaboration – a robot sous-chef application, 2024
2024
-
[17]
Discovering failure modes in vision-language models using rl, 2026
Kanishk Jain, Qian Yang, Shravan Nayak, Parisa Kordjamshidi, Nishanth Anand, and Aishwarya Agrawal. Discovering failure modes in vision-language models using rl, 2026
2026
-
[18]
Failure modes in machine learning systems, 2019
Ram Shankar Siva Kumar, David O Brien, Kendra Albert, Salomé Viljöen, and Jeffrey Snover. Failure modes in machine learning systems, 2019
2019
-
[19]
Concept-based explanations in computer vision: Where are we and where could we go?, 2024
Jae Hee Lee, Georgii Mikriukov, Gesina Schwalbe, Stefan Wermter, and Diedrich Wolter. Concept-based explanations in computer vision: Where are we and where could we go?, 2024
2024
-
[20]
A survey of state of the art large vision language models: Alignment, benchmark, evaluations and challenges, 2025
Zongxia Li, Xiyang Wu, Hongyang Du, Fuxiao Liu, Huy Nghiem, and Guangyao Shi. A survey of state of the art large vision language models: Alignment, benchmark, evaluations and challenges, 2025
2025
-
[21]
Improved Baselines with Visual Instruction Tuning
Haotian Liu, Pengchuan Zhang, Haocheng Ruan, Xiaowei Hu, Chunyuan Li, and Lei Zhang. Improved baselines with visual instruction tuning.arXiv preprint arXiv:2310.03744, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[22]
Safety alignment for vision language models, 2024
Zhendong Liu, Yuanbi Nie, Yingshui Tan, Xiangyu Yue, Qiushi Cui, Chongjun Wang, Xiaoyong Zhu, and Bo Zheng. Safety alignment for vision language models, 2024
2024
-
[23]
Mm-eureka: Exploring the frontiers of multimodal reasoning with rule-based reinforcement learning, 2025
Fanqing Meng, Lingxiao Du, Zongkai Liu, Zhixiang Zhou, Quanfeng Lu, Daocheng Fu, Tiancheng Han, Botian Shi, Wenhai Wang, Junjun He, Kaipeng Zhang, Ping Luo, Yu Qiao, Qiaosheng Zhang, and Wenqi Shao. Mm-eureka: Exploring the frontiers of multimodal reasoning with rule-based reinforcement learning, 2025
2025
-
[24]
Pedram MohajerAnsari, Amir Salarpour, Michael Kühr, Siyu Huang, Mohammad Hamad, Sebastian Steinhorst, Habeeb Olufowobi, Bing Li, and Mert D. Pesé. Toward inherently robust vlms against visual perception attacks, 2026
2026
-
[25]
Concept- based explainable artificial intelligence: A survey.ACM Computing Surveys, November 2025
Eleonora Poeta, Gabriele Ciravegna, Eliana Pastor, Tania Cerquitelli, and Elena Baralis. Concept- based explainable artificial intelligence: A survey.ACM Computing Surveys, November 2025
2025
-
[26]
Qwen3 technical report, 2025
Qwen-Team. Qwen3 technical report, 2025
2025
-
[27]
Vlm-robustbench: A comprehensive benchmark for robustness of vision-language models, 2026
Rohit Saxena, Alessandro Suglia, and Pasquale Minervini. Vlm-robustbench: A comprehensive benchmark for robustness of vision-language models, 2026. 11
2026
-
[28]
Explain any concept: Segment anything meets concept-based explanation
Ao Sun, Pingchuan Ma, Yuanyuan Yuan, and Shuai Wang. Explain any concept: Segment anything meets concept-based explanation. In A. Oh, T. Naumann, A. Globerson, K. Saenko, M. Hardt, and S. Levine, editors,Advances in Neural Information Processing Systems, vol- ume 36, pages 21826–21840. Curran Associates, Inc., 2023
2023
-
[29]
Glm-4.5v and glm-4.1v-thinking: Towards versatile multimodal reasoning with scalable reinforcement learning, 2026
V Team, Wenyi Hong, Wenmeng Yu, Xiaotao Gu, Guo Wang, Guobing Gan, Haomiao Tang, Jiale Cheng, Ji Qi, Junhui Ji, Lihang Pan, Shuaiqi Duan, Weihan Wang, Yan Wang, Yean Cheng, Zehai He, Zhe Su, Zhen Yang, Ziyang Pan, Aohan Zeng, Baoxu Wang, Bin Chen, Boyan Shi, Changyu Pang, Chenhui Zhang, Da Yin, Fan Yang, Guoqing Chen, Haochen Li, Jiale Zhu, Jiali Chen, Ji...
2026
-
[30]
Gonzalo Travieso, Alexandre Benatti, and Luciano da F. Costa. An analytical approach to the jaccard similarity index, 2024
2024
-
[31]
Failure modes in llm systems: A system-level taxonomy for reliable ai applica- tions, 2025
Vaishali Vinay. Failure modes in llm systems: A system-level taxonomy for reliable ai applica- tions, 2025
2025
-
[32]
Qwen2-VL: Enhancing Vision-Language Model's Perception of the World at Any Resolution
Peng Wang, Shuai Bai, Sinan Tan, Shijie Wang, Zhihao Fan, Jinze Bai, Keqin Chen, Xuejing Liu, Jialin Wang, Wenbin Ge, Yang Fan, Kai Dang, Mengfei Du, Xuancheng Ren, Rui Men, Dayiheng Liu, Chang Zhou, Jingren Zhou, and Junyang Lin. Qwen2-vl: Enhancing vision- language model’s perception of the world at any resolution.arXiv preprint arXiv:2409.12191, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[33]
AdvEDM: Fine-grained adversarial attack against VLM-based embodied agents
Yichen Wang, Hangtao Zhang, Hewen Pan, Ziqi Zhou, Xianlong Wang, Peijin Guo, Lulu Xue, Shengshan Hu, Minghui Li, and Leo Yu Zhang. AdvEDM: Fine-grained adversarial attack against VLM-based embodied agents. InThe Thirty-ninth Annual Conference on Neural Information Processing Systems, 2026
2026
-
[34]
Navitrace: Evaluating embodied navigation of vision-language models, 2026
Tim Windecker, Manthan Patel, Moritz Reuss, Richard Schwarzkopf, Cesar Cadena, Rudolf Lioutikov, Marco Hutter, and Jonas Frey. Navitrace: Evaluating embodied navigation of vision-language models, 2026
2026
-
[35]
Sadler, Dinesh Manocha, and Amrit Singh Bedi
Xiyang Wu, Souradip Chakraborty, Ruiqi Xian, Jing Liang, Tianrui Guan, Fuxiao Liu, Brian M. Sadler, Dinesh Manocha, and Amrit Singh Bedi. On the vulnerability of llm/vlm-controlled robotics, 2025
2025
-
[36]
Are vlms ready for autonomous driving? an empirical study from the reliability, data, and metric perspectives, 2025
Shaoyuan Xie, Lingdong Kong, Yuhao Dong, Chonghao Sima, Wenwei Zhang, Qi Alfred Chen, Ziwei Liu, and Liang Pan. Are vlms ready for autonomous driving? an empirical study from the reliability, data, and metric perspectives, 2025
2025
-
[37]
Visual adversarial attack on vision-language models for autonomous driving, 2024
Tianyuan Zhang, Lu Wang, Xinwei Zhang, Yitong Zhang, Boyi Jia, Siyuan Liang, Shengshan Hu, Qiang Fu, Aishan Liu, and Xianglong Liu. Visual adversarial attack on vision-language models for autonomous driving, 2024
2024
-
[38]
Mm-rlhf: The next step forward in multimodal llm alignment, 2025
Yi-Fan Zhang, Tao Yu, Haochen Tian, Chaoyou Fu, Peiyan Li, Jianshu Zeng, Wulin Xie, Yang Shi, Huanyu Zhang, Junkang Wu, Xue Wang, Yibo Hu, Bin Wen, Fan Yang, Zhang Zhang, Tingting Gao, Di Zhang, Liang Wang, Rong Jin, and Tieniu Tan. Mm-rlhf: The next step forward in multimodal llm alignment, 2025
2025
-
[39]
Manipbench: Benchmarking vision-language models for low-level robot manipulation, 2025
Enyu Zhao, Vedant Raval, Hejia Zhang, Jiageng Mao, Zeyu Shangguan, Stefanos Nikolaidis, Yue Wang, and Daniel Seita. Manipbench: Benchmarking vision-language models for low-level robot manipulation, 2025. 12
2025
-
[40]
Vlmbench: A compositional benchmark for vision-and-language manipulation, 2022
Kaizhi Zheng, Xiaotong Chen, Odest Chadwicke Jenkins, and Xin Eric Wang. Vlmbench: A compositional benchmark for vision-and-language manipulation, 2022
2022
-
[41]
Xingcheng Zhou, Mingyu Liu, Ekim Yurtsever, Bare Luka Zagar, Walter Zimmer, Hu Cao, and Alois C. Knoll. Vision language models in autonomous driving: A survey and outlook, 2024
2024
-
[42]
no shock risk
Zhihan Zhu, Yanhao Zhang, and Yong Xia. Best subset selection: Optimal pursuit for feature selection and elimination. InForty-second International Conference on Machine Learning, 2025. 13 Appendix This appendix contains supplementary material organized as follows: •Appendix A— Impact statement. • Appendix B— Full catalog of concepts, covering autonomous d...
2025
-
[43]
Varying beam expansion width in Appendix D.1
-
[44]
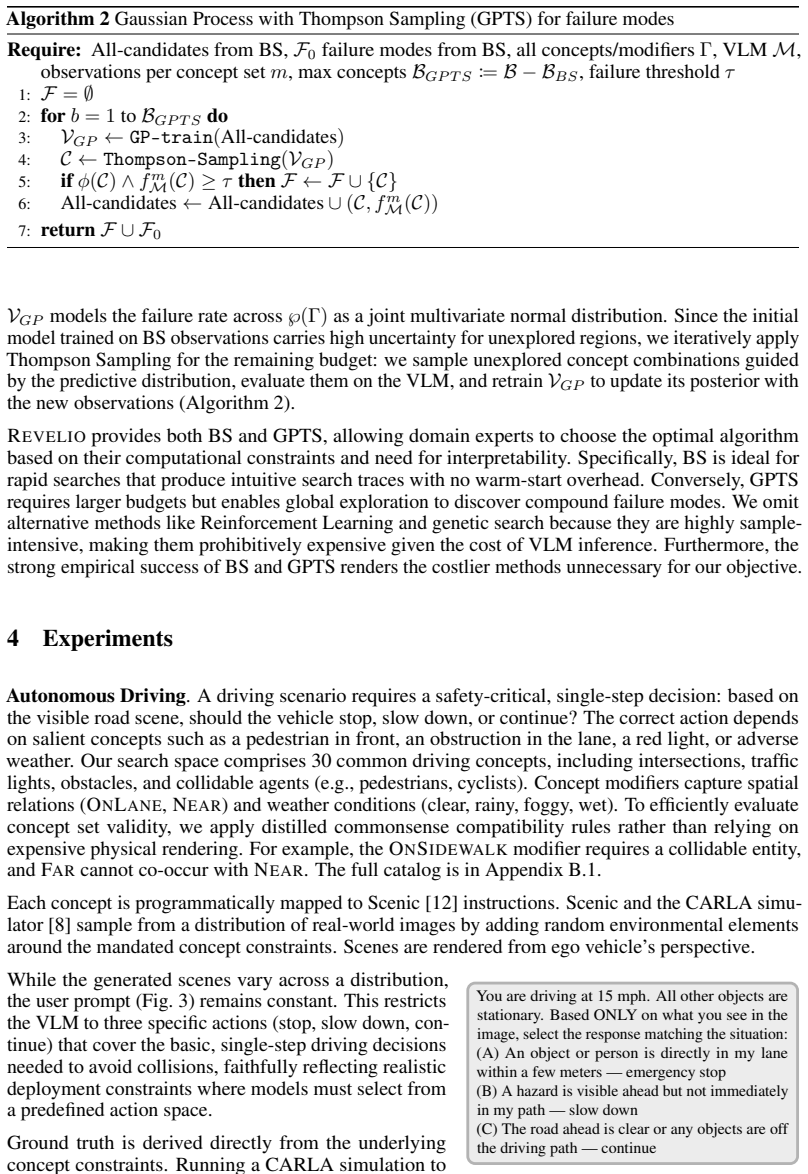
Varying initial beam-phase budget in GPTS in Appendix D.2
-
[45]
Varying number of observations for per concept set failure rate estimation in Appendix D.3
-
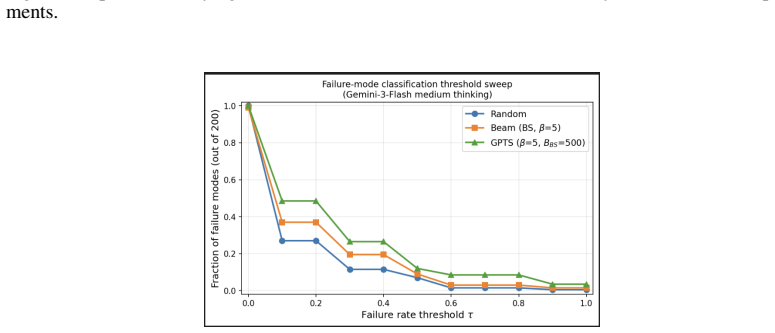
[46]
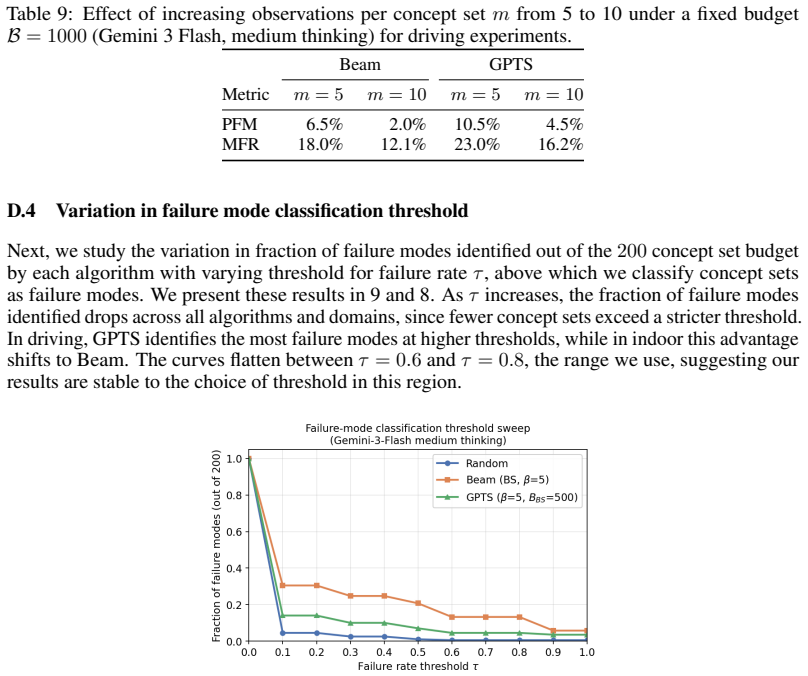
Variation in failure mode classification threshold in Appendix D.4
-
[47]
We use k= 5 by default
Varying the Gaussian Process (GP) kernel in Appendix D.5 D.1 Varying beam width Beam width k is the primary hyperparameter of the BS algorithm. We use k= 5 by default. In this study, we experiment with k= 1 (greedy search) and k= 10 to analyze the effects of tuning the exploitative nature of the search on the primary metrics. Table 6: Effect of varying be...
-
[48]
barrier ... slow down
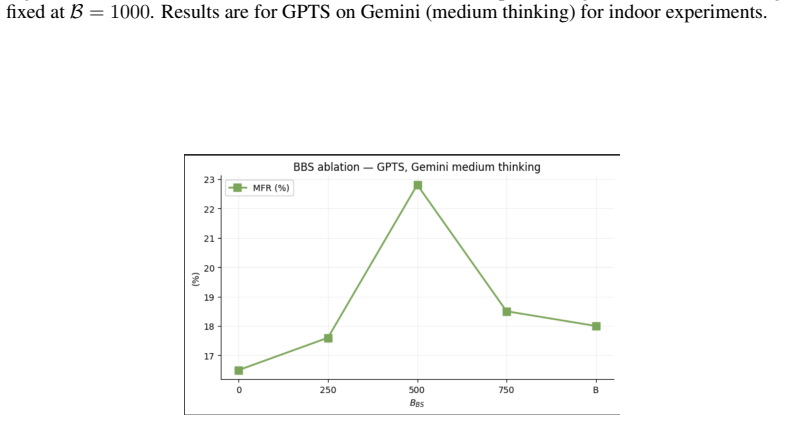
For GPTS, we keep half the budget for the initial beam-phase, similar to default. Increasing observations per concept set from m= 5 to m= 10 consistently reduces both PFM and MFR across algorithms and domains, as more evaluations per set yield more reliable failure rate estimates. Table 8: Effect of increasing observations per concept set m from 5 to 10 u...
-
[49]
weather_clear_noon_0 + chain_barrier_far + town_town02
-
[50]
chain_barrier_far + debris_far
-
[51]
weather_hard_rain_0 + chain_barrier_far + town_town01
-
[52]
obstruction_far + cyclist
-
[53]
obstruction_far + cyclist + weather_clear_noon_0
-
[54]
obstruction_far + cyclist + weather_foggy_0
-
[55]
debris_far + weather_hard_rain_0 + town_town02
-
[56]
weather_hard_rain_0 + chain_barrier_far + town_town02
-
[57]
cyclist + obstruction_far + chain_barrier_far
-
[58]
cyclist + obstruction_far + weather_clear_noon_0
-
[59]
cyclist + weather_wet_0 + obstruction_near
-
[60]
chain_barrier_far + cyclist + weather_clear_noon
-
[61]
obstruction_far + weather_wet_0 + town_town02
chain_barrier_far + town_town02 Gemini (low) 1. obstruction_far + weather_wet_0 + town_town02
-
[62]
weather_cloudy_0 + light_green + chain_barrier_far
-
[63]
weather_clear_noon_0 + cyclist
-
[64]
weather_hard_rain_0 + chain_barrier_far + light_green
-
[65]
weather_hard_rain_0 + chain_barrier_far + cyclist
-
[66]
obstruction_far + town_town02 + light_green
-
[67]
obstruction_far + cyclist + weather_clear_noon_0 + chain_barrier_far
-
[68]
obstruction_far + cyclist + weather_clear_noon_0 + town_town02
-
[69]
cyclist + town_town02 + on_lane
-
[70]
chain_barrier_far + light_green + weather_clear_noon
-
[71]
chain_barrier_far + weather_cloudy
-
[73]
town_town02 + obstruction_far + debris_near + weather_cloudy_0
chain_barrier_far + light_green Gemini (medium) 1. town_town02 + obstruction_far + debris_near + weather_cloudy_0
-
[74]
chain_barrier_far + light_green + town_town02 + debris_near
-
[76]
cyclist + weather_clear_noon_0
-
[77]
weather_wet_0 + cone + far_0 + on_lane_0
-
[78]
weather_wet_0 + cone + far_0 + on_lane_0 + town_town01
-
[79]
weather_wet_0 + cone + far_0 + on_lane_0 + light_green
-
[80]
debris_far + obstruction_near + intersection_ego
-
[81]
debris_far + obstruction_near + intersection_ego + emergency_vehicle
-
[83]
town_town02 + debris_far + intersection_ego
-
[84]
town_town02 + debris_far + light_green
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.