Recognition: unknown
Relative Pose-Velocity Estimation Using Dual IMU Measurements and Relative Position Sensing
Pith reviewed 2026-05-14 19:08 UTC · model grok-4.3
The pith
Relative pose and velocity between a vehicle and moving target can be estimated with global exponential convergence from dual IMUs and relative position measurements when target acceleration satisfies a persistence-of-excitation condition.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By recasting the nonlinear relative pose-velocity dynamics on SE_2(3) into an exact linear time-varying model in R^15, a deterministic Riccati observer guarantees global exponential convergence of the estimation error in ambient space whenever uniform observability holds; for relative position measurements this reduces to a persistence-of-excitation condition on the target acceleration, while a complementary nonlinear filter on SO(3) separately ensures almost global asymptotic stability of the orientation component.
What carries the argument
The exact recasting of SE_2(3) relative dynamics into a linear time-varying system in R^15 that enables the application of a deterministic Riccati observer whose error convergence is governed by uniform observability conditions.
If this is right
- The estimation error converges globally and exponentially in ambient space for relative position measurements when target acceleration satisfies persistence of excitation.
- The orientation estimate from the SO(3) complementary filter is almost globally asymptotically stable.
- Uniform observability for bearing measurements requires additional conditions beyond persistence of excitation.
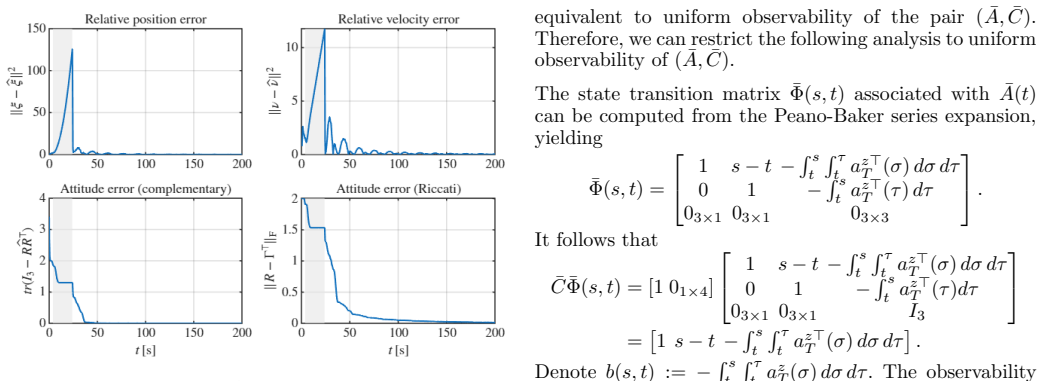
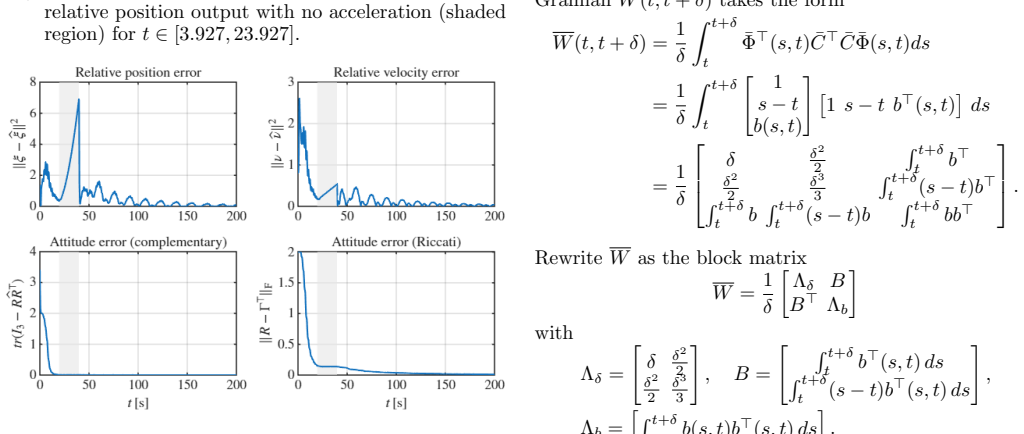
- Simulation results confirm the practical performance of the combined observer and filter.
Where Pith is reading between the lines
- The method could be extended to handle cases with occasional loss of relative measurements if the excitation condition is maintained over sufficient intervals.
- Similar LTV embeddings might apply to other estimation problems on Lie groups like SE(3) for rigid body motion.
- Real-world implementation would require checking sensitivity to sensor noise and biases not fully addressed in the basic model.
Load-bearing premise
The nonlinear SE_2(3) relative dynamics can be exactly rewritten as a linear time-varying system in R^15 without any approximation, and the persistence-of-excitation condition on target acceleration holds.
What would settle it
A numerical counterexample in which the target follows a trajectory with non-persistently-exciting acceleration yet the observer error still converges exponentially to zero would falsify the necessity of the condition.
Figures

read the original abstract
This paper addresses the problem of estimating the relative pose (position and orientation) and velocity of a vehicle with respect to a moving target, where both are equipped with Inertial Measurement Units (IMUs), assuming the availability of relative position or bearing measurements. The body-target relative dynamics are formulated on $\mathbf{SE}_2(3)$ and recast into a linear time-varying (LTV) model in the ambient space $\mathbb{R}^{15}$, on which a deterministic Riccati observer is designed. We analyze the uniform observability (UO) conditions required to guarantee global exponential convergence of the estimation error in the ambient space for both measurement cases. In the case of relative position measurements, UO requires only a persistence-of-excitation condition on the target acceleration, whereas for bearing measurements, additional conditions are required. Building on this, a nonlinear complementary filter on $\mathbf{SO}(3)$ is designed to provide a smooth estimate of the orientation component of the state with almost global asymptotic stability. Finally, simulation results are provided to validate the proposed solution.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper addresses relative pose-velocity estimation using dual IMUs and relative position or bearing measurements. It formulates the body-target relative dynamics on SE_2(3), recasts them into an LTV model in R^15, designs a Riccati observer, analyzes uniform observability conditions for global exponential convergence, adds a nonlinear complementary filter on SO(3) for orientation, and validates with simulations.
Significance. If the LTV recasting is exact, this work offers a rigorous framework for globally convergent relative estimation by leveraging classical observer theory on an ambient vector space. The finding that UO for position measurements requires only persistence of excitation on target acceleration is a simplifying and useful result. The combination with the almost globally stable orientation filter enhances practicality. Simulations provide initial validation, but stronger empirical evidence would increase impact.
major comments (1)
- [LTV recasting of SE_2(3) dynamics] The manuscript asserts that the nonlinear relative dynamics on SE_2(3) are recast into an exact LTV model in R^15. This is load-bearing for the convergence claims. Please provide the detailed derivation (e.g., in the section following the kinematics) demonstrating that all nonlinear terms from the group operations and adjoint maps are fully absorbed into the time-varying matrix without leaving state-dependent residuals or approximations. If the equivalence is not exact, the uniform observability analysis and Riccati-based global exponential stability would not transfer directly to the original nonlinear system.
minor comments (3)
- [Abstract] Specify the dimension of the state space more clearly when mentioning R^15.
- [Simulations section] Include plots of estimation errors over time and discuss the observed convergence rates in relation to the theoretical UO conditions.
- [References] Ensure all cited works on Lie group observers and Riccati filters are up to date and directly relevant.
Simulated Author's Rebuttal
We thank the referee for their careful reading of the manuscript and for highlighting the importance of the LTV recasting step. We address the major comment below and will revise the paper to include the requested derivation.
read point-by-point responses
-
Referee: The manuscript asserts that the nonlinear relative dynamics on SE_2(3) are recast into an exact LTV model in R^15. This is load-bearing for the convergence claims. Please provide the detailed derivation (e.g., in the section following the kinematics) demonstrating that all nonlinear terms from the group operations and adjoint maps are fully absorbed into the time-varying matrix without leaving state-dependent residuals or approximations. If the equivalence is not exact, the uniform observability analysis and Riccati-based global exponential stability would not transfer directly to the original nonlinear system.
Authors: The recasting is exact with no approximations or residuals. The SE_2(3) relative kinematics are first written in matrix form using the group operation and adjoint representation. Vectorizing the state (relative position, relative velocity, and the nine entries of the rotation matrix) yields a 15-dimensional vector X. All nonlinear contributions arising from the adjoint action on the velocity and from the rotation matrix multiplication are then collected into the time-varying matrix A(t), which depends only on the measured angular velocities from the two IMUs and on the known target acceleration (treated as an exogenous input). The resulting dynamics are precisely linear: dot{X} = A(t)X + B(t)U(t), where U(t) contains the measured accelerations. No state-dependent nonlinear terms remain. We will insert the complete algebraic derivation immediately after the kinematics section in the revised manuscript, explicitly displaying A(t) and B(t) to make the equivalence transparent. This ensures the uniform-observability analysis and the global exponential stability of the Riccati observer carry over directly to the original nonlinear system on SE_2(3). revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper formulates relative dynamics on the standard SE_2(3) group, recasts them into an LTV system in ambient R^15 coordinates, and applies classical deterministic Riccati observer theory. Uniform observability is analyzed via an independent persistence-of-excitation condition on target acceleration. No load-bearing step reduces by construction to a fitted parameter renamed as prediction, a self-definitional loop, or a self-citation chain that substitutes for external verification. The central claims rest on the exactness of the LTV embedding and standard Riccati convergence results, which are not shown to collapse into the paper's own inputs.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Relative body-target dynamics can be formulated on SE_2(3)
- domain assumption The SE_2(3) dynamics admit an exact recasting into an LTV model in R^15
Reference graph
Works this paper leans on
-
[1]
Nonlinear Attitude Estimation Using Intermittent Linear Velocity and Vector Measurements , year =
Miaomiao Wang and Abdelhamid Tayebi , booktitle =. Nonlinear Attitude Estimation Using Intermittent Linear Velocity and Vector Measurements , year =
-
[2]
Solution methods to the nearest rotation matrix problem in
Soheil Sarabandi and Federico Thomas , issue =. Solution methods to the nearest rotation matrix problem in. Numerical Linear Algebra with Applications , month =
-
[3]
Nonlinear Complementary Filters on the Special Orthogonal Group , volume =
Robert Mahony and Tarek Hamel and Jean-Michel Pflimlin , issue =. Nonlinear Complementary Filters on the Special Orthogonal Group , volume =. IEEE Transactions on Automatic Control , month =
-
[4]
Pieter van Goor and Tarek Hamel and Robert Mahony , journal =. Synchronous observer design for Inertial Navigation Systems with almost-global convergence , volume =
-
[5]
Position estimation from direction or range measurements , volume =
Tarek Hamel and Claude Samson , journal =. Position estimation from direction or range measurements , volume =
-
[6]
Riccati Observers for the Nonstationary PnP Problem , volume =
Tarek Hamel and Claude Samson , issue =. Riccati Observers for the Nonstationary PnP Problem , volume =. IEEE Transactions on Automatic Control , keywords =
-
[7]
Uniform Observability of Linear Time-Varying Systems and Application to Robotics Problems , year =
Pascal Morin and Alexandre Eudes and Glauco Scandaroli , pages =. Uniform Observability of Linear Time-Varying Systems and Application to Robotics Problems , year =
-
[8]
Siffedine Benahmed and Soulaimane Berkane and Tarek Hamel , title =. 2025 , publisher =
work page 2025
-
[9]
D. Aeyels and R. Sepulchre and J. Peuteman , issue =. Asymptotic stability for time-variant systems and observability: Uniform and nonuniform criteria , volume =. Mathematics of Control, Signals, and Systems , month =
-
[10]
Chi-Tsong. Chen , publisher =. Linear system theory and design , year =
-
[11]
Autonomous Landing of a Multirotor Micro Air Vehicle on a High Velocity Ground Vehicle , volume =
Alexandre Borowczyk and Duc-Tien Nguyen and André Phu-Van Nguyen and Dang Quang Nguyen and David Saussié and Jerome Le Ny , issue =. Autonomous Landing of a Multirotor Micro Air Vehicle on a High Velocity Ground Vehicle , volume =. IFAC-PapersOnLine , month =
-
[12]
Vision-based autonomous quadrotor landing on a moving platform , year =
Davide Falanga and Alessio Zanchettin and Alessandro Simovic and Jeffrey Delmerico and Davide Scaramuzza , booktitle =. Vision-based autonomous quadrotor landing on a moving platform , year =
-
[13]
Vision Based Autonomous Landing of Multirotor UAV on Moving Platform , volume =
Oualid Araar and Nabil Aouf and Ivan Vitanov , issue =. Vision Based Autonomous Landing of Multirotor UAV on Moving Platform , volume =. Journal of Intelligent & Robotic Systems , month =
-
[14]
Pierre Gintrand and Minh-Duc Hua and Tarek Hamel and Guillaume Varra , booktitle =. On the uniform observability of the relative pose estimation problem using bearing measurements and epipolar constraints , year =
-
[15]
Yong Li and Ai Zhang , journal =. Observability analysis and autonomous navigation for two satellites with relative position measurements , volume =
-
[16]
Joel Reis and Pedro Batista and Paulo Oliveira and Carlos Silvestre , journal =. Nonlinear Observer on SO(3) for Attitude Estimation on Rotating Earth Using Single Vector Measurements , volume =
-
[17]
Han-Earl Park and Young-Rok Kim , issue =. Relative navigation for autonomous formation flying satellites using the state-dependent Riccati equation filter , volume =. Advances in Space Research , month =
-
[18]
Mauro Massari and Mattia Zamaro , issue =. Application of SDRE technique to orbital and attitude control of spacecraft formation flying , volume =. Acta Astronautica , month =
-
[19]
Globally exponentially stable cascade observers for attitude estimation , volume =
Pedro Batista and Carlos Silvestre and Paulo Oliveira , issn =. Globally exponentially stable cascade observers for attitude estimation , volume =. Control Engineering Practice , month =
-
[20]
A GES attitude observer with single vector observations , volume =
Pedro Batista and Carlos Silvestre and Paulo Oliveira , issn =. A GES attitude observer with single vector observations , volume =. Automatica , month =
-
[21]
State Estimation Using Single Body-Frame Bearing Measurements , year =
Sifeddine Benahmed and Soulaimane Berkane , isbn =. State Estimation Using Single Body-Frame Bearing Measurements , year =. 2024 European Control Conference (ECC) , month =
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.