Recognition: no theorem link
Multi-Modal Guided Multi-Source Domain Adaptation for Object Detection
Pith reviewed 2026-05-14 19:33 UTC · model grok-4.3
The pith
Depth maps and text prompts let a detector adapt object detection across multiple source domains without target labels.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
MS-DePro consists of depth-guided localization that produces domain-agnostic region proposals from depth maps and multi-modal guided prompt learning that integrates multi-modal features to align learnable text embeddings for classification. By leveraging these domain-agnostic inputs, the detector learns domain-agnostic characteristics while preserving domain-specific information, outperforming previous multi-source domain adaptation methods on standard benchmarks.
What carries the argument
MS-DePro's depth-guided localization and multi-modal guided prompt learning, which encode domain-agnostic characteristics from depth maps and text to produce region proposals and aligned embeddings for cross-domain object detection.
If this is right
- MS-DePro reaches state-of-the-art detection accuracy on existing multi-source domain adaptation benchmarks.
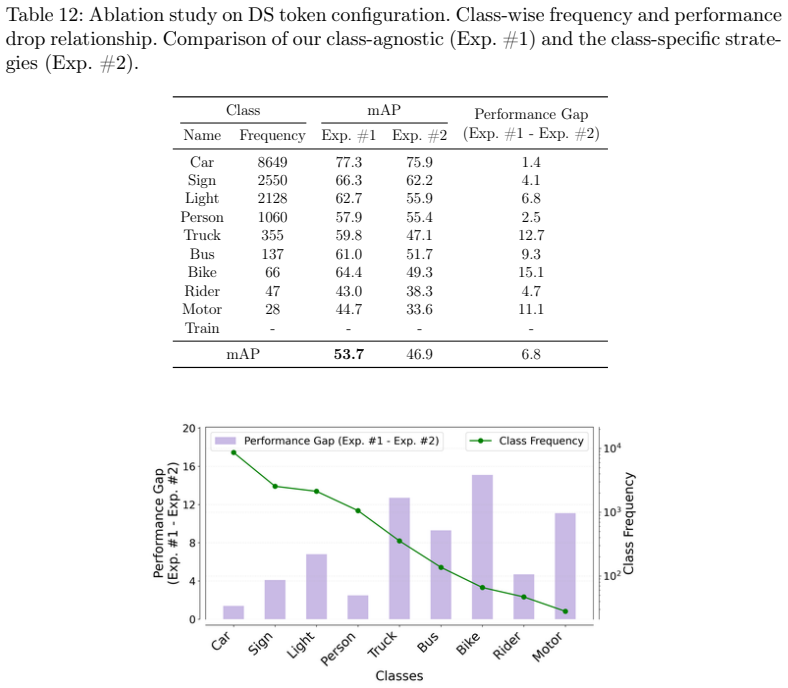
- Ablation experiments isolate performance lifts from the depth-guided localization and the prompt-learning modules.
- The method keeps domain-specific cues while extracting domain-agnostic signals from non-RGB modalities.
- Separate processing of each source domain outperforms simple blending of all sources.
Where Pith is reading between the lines
- The approach could transfer to semantic segmentation if depth continues to supply reliable object boundaries across domains.
- Text-prompt alignment opens a route for adding new object categories at test time by editing the text embeddings.
- Performance would likely degrade in settings where depth sensors are absent or poorly calibrated.
- Combining the same depth and prompt signals with infrared or event data might further widen the domain gap the method can bridge.
Load-bearing premise
Depth maps and text are reliably available as domain-agnostic inputs that improve region proposals and embeddings without introducing new biases or needing target-domain depth data.
What would settle it
Running the full MS-DePro pipeline on the MSDA benchmarks but replacing depth inputs with random noise or removing the prompt alignment step yields no accuracy gain over strong multi-source baselines.
Figures






read the original abstract
General object detection (OD) struggles to detect objects in the target domain that differ from the training distribution. To address this, recent studies demonstrate that training from multiple source domains and explicitly processing them separately for multi-source domain adaptation (MSDA) outperforms blending them for unsupervised domain adaptation (UDA). However, existing MSDA methods learn domain-agnostic features from domain-specific RGB images while preserving domain-specific information from the domain-agnostic feature map. To address this, we propose MS-DePro: Multi-Source Detector with Depth and Prompt, composed of (1) depth-guided localization and (2) multi-modal guided prompt learning. We leverage domain-agnostic input modalities, namely depth maps and text, to encode domain-agnostic characteristics. Specifically, we utilize depth maps to generate domain-agnostic region proposals for localization and integrate multi-modal features to align learnable text embeddings for classification. MS-DePro achieves state-of-the-art performance on MSDA benchmarks, and comprehensive ablations demonstrate the effectiveness of our contributions. Our code is available on https://github.com/sejong-rcv/Multi-Modal-Guided-Multi-Source-Domain-Adaptation-for-Object-Detection.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes MS-DePro, a multi-source domain adaptation (MSDA) framework for object detection that integrates depth maps for domain-agnostic region proposals via depth-guided localization and text embeddings via multi-modal prompt learning for classification. It claims state-of-the-art performance on MSDA benchmarks with supporting ablations, leveraging depth and text as domain-agnostic modalities to improve cross-domain generalization over RGB-only approaches.
Significance. If the central claims hold under scrutiny of the depth source and target-domain handling, the work would be moderately significant for MSDA in object detection by showing how auxiliary modalities can produce more invariant proposals and aligned features. The public code release is a clear strength that supports reproducibility and follow-up work.
major comments (2)
- [Abstract] Abstract: The assertion that depth maps are domain-agnostic inputs enabling domain-agnostic region proposals is load-bearing for the central claim, yet the manuscript does not specify the depth source for target domains (e.g., Cityscapes/Foggy Cityscapes benchmarks supply only RGB). If monocular depth estimation is applied at test time, domain-specific errors could be injected that the prompt-learning stage cannot cancel, undermining the domain-invariance premise.
- [Methods] Methods section (depth-guided localization component): The description of how depth maps generate region proposals lacks explicit handling of target-domain depth at inference; without this, it is impossible to verify whether the method truly operates in a fully unsupervised MSDA setting or implicitly requires target depth data.
minor comments (2)
- [Abstract] The abstract states 'comprehensive ablations demonstrate the effectiveness of our contributions' but does not preview the specific ablation factors (e.g., depth vs. prompt removal) or report quantitative deltas; adding a one-sentence summary would improve clarity.
- [Introduction] Notation for multi-modal feature alignment is introduced without an accompanying equation or diagram reference in the early sections, making the prompt-learning description harder to follow on first reading.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and for identifying the need for greater clarity on depth map handling. We agree that the current manuscript does not explicitly describe the depth source for target domains and will revise both the abstract and methods section to address this. Our responses to the major comments are provided below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The assertion that depth maps are domain-agnostic inputs enabling domain-agnostic region proposals is load-bearing for the central claim, yet the manuscript does not specify the depth source for target domains (e.g., Cityscapes/Foggy Cityscapes benchmarks supply only RGB). If monocular depth estimation is applied at test time, domain-specific errors could be injected that the prompt-learning stage cannot cancel, undermining the domain-invariance premise.
Authors: We acknowledge that the manuscript does not explicitly state how depth maps are obtained for target domains that provide only RGB images. In the revised version we will clarify that depth maps are generated by applying a fixed, pre-trained monocular depth estimation model (e.g., MiDaS) to the RGB input in both source and target domains; this model is never fine-tuned on target data. While depth estimation errors are inevitable, our ablation studies demonstrate that the resulting proposals remain more domain-invariant than RGB-only baselines, yielding the reported performance gains. We will add a short discussion of robustness to depth noise and include the exact depth model and inference procedure in the methods section. revision: yes
-
Referee: [Methods] Methods section (depth-guided localization component): The description of how depth maps generate region proposals lacks explicit handling of target-domain depth at inference; without this, it is impossible to verify whether the method truly operates in a fully unsupervised MSDA setting or implicitly requires target depth data.
Authors: We agree that the current methods description is incomplete on this point. The revised manuscript will explicitly state that, at inference, depth maps for target-domain images are produced by the same pre-trained monocular depth estimator used during training, with no access to ground-truth depth or any target supervision. This keeps the setting fully unsupervised. We will also add a concise pipeline description (and optional pseudocode) that distinguishes training and inference stages to remove any ambiguity. revision: yes
Circularity Check
Empirical architecture; no derivation reduces to fitted inputs or self-citations by construction
full rationale
The paper introduces MS-DePro as a composite detector that applies depth maps for region proposals and text prompts for embedding alignment within a multi-source domain adaptation pipeline. All performance claims rest on external MSDA benchmarks rather than internal equations that equate outputs to training losses or parameters by definition. No self-citation chain is invoked to establish uniqueness, and the method is presented as an engineering combination whose effectiveness is measured empirically, not derived tautologically from its own inputs.
Axiom & Free-Parameter Ledger
free parameters (1)
- network weights and prompt embeddings
axioms (2)
- domain assumption Depth maps provide domain-agnostic information for generating region proposals
- domain assumption Multi-modal features can align learnable text embeddings for classification across domains
Reference graph
Works this paper leans on
-
[1]
X. Wei, S. Liu, Y. Xiang, Z. Duan, C. Zhao, Y. Lu, Incremental learning based multi-domain adaptation for object detection, Knowledge-Based Systems 210 (2020) 106420
work page 2020
-
[2]
J. Deng, W. Li, Y. Chen, L. Duan, Unbiased mean teacher for cross- domain object detection, in: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021, pp. 4091–4101. 30
work page 2021
-
[3]
Y.-J. Li, X. Dai, C.-Y. Ma, Y.-C. Liu, K. Chen, B. Wu, Z. He, K. Kitani, P. Vajda, Cross-domain adaptive teacher for object detection, in: Pro- ceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 7581–7590
work page 2022
-
[4]
Y. Bai, C. Liu, R. Yang, X. Li, Misalignment-resistant domain adaptive learning for one-stage object detection, Knowledge-Based Systems 305 (2024) 112605
work page 2024
-
[5]
X. Yao, S. Zhao, P. Xu, J. Yang, Multi-source domain adaptation for object detection, in: Proceedings of the IEEE/CVF International Con- ference on Computer Vision, 2021, pp. 3273–3282
work page 2021
-
[6]
J. Wu, J. Chen, M. He, Y. Wang, B. Li, B. Ma, W. Gan, W. Wu, Y. Wang, D. Huang, Target-relevant knowledge preservation for multi- source domain adaptive object detection, in: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 5301–5310
work page 2022
- [7]
- [8]
-
[9]
C. Ge, R. Huang, M. Xie, Z. Lai, S. Song, S. Li, G. Huang, Domain adaptation via prompt learning, IEEE Transactions on Neural Networks and Learning Systems (2023)
work page 2023
- [10]
-
[11]
S. Addepalli, A. R. Asokan, L. Sharma, R. V. Babu, Leveraging vision- language models for improving domain generalization in image classifica- 31 tion, in: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 23922–23932
work page 2024
-
[12]
L. Yang, B. Kang, Z. Huang, Z. Zhao, X. Xu, J. Feng, H. Zhao, Depth anything v2, in: Advances in Neural Information Processing Systems, Vol. 37, 2024, pp. 21875–21911
work page 2024
-
[13]
Depth Pro: Sharp Monocular Metric Depth in Less Than a Second
A. Bochkovskii, A. Delaunoy, H. Germain, M. Santos, Y. Zhou, S. R. Richter, V. Koltun, Depth pro: Sharp monocular metric depth in less than a second, arXiv preprint arXiv:2410.02073 (2024)
work page internal anchor Pith review arXiv 2024
-
[14]
Y. Lu, H. Huang, X. Hu, Z. Lai, Multiple adaptation network for multi- source and multi-target domain adaptation, IEEE Transactions on Mul- timedia 27 (2025) 5731–5745
work page 2025
-
[15]
Y. Lu, Y. Yang, W. K. Wong, A. Toomey, Z. Lai, X. Li, Energy-driven explicit alignment network: A blended-target domain adaptation ap- proach, IEEE Transactions on Multimedia (2026)
work page 2026
-
[16]
Y. Lu, Y. Lan, H. Yang, Z. Lai, X. Li, Exploring generic knowledge and reactivating source model for source-free universal domain adaptation, IEEE Transactions on Multimedia (2026)
work page 2026
-
[17]
Y. Lu, H. Huang, W. K. Wong, X. Hu, Z. Lai, X. Li, Adaptive dispersal and collaborative clustering for few-shot unsupervised domain adapta- tion, IEEE Transactions on Image Processing (2025)
work page 2025
-
[18]
C.Ouyang,C.Chen,S.Li,Z.Li,C.Qin,W.Bai,D.Rueckert,Causality- inspired single-source domain generalization for medical image segmen- tation, IEEE Transactions on Medical Imaging 42 (4) (2022) 1095–1106
work page 2022
-
[19]
J. Song, H. Chen, Y. Lyu, W. Nie, A.-A. Liu, Causality-inspired un- supervised domain adaptation with target style imitation for medical image segmentation, IEEE Transactions on Circuits and Systems for Video Technology (2025)
work page 2025
-
[20]
K. Zhou, M. Jiang, B. Gabrys, Y. Xu, Learning causal representations based on a gae embedded autoencoder, IEEE Transactions on Knowl- edge and Data Engineering (2025). 32
work page 2025
-
[21]
J. Wang, Y. Chen, Z. Dong, M. Gao, H. Lin, Q. Miao, Sabv-depth: A biologically inspired deep learning network for monocular depth estima- tion, Knowledge-Based Systems 263 (2023) 110301
work page 2023
- [22]
-
[23]
K. Zhou, J. Yang, C. C. Loy, Z. Liu, Learning to prompt for vision- language models, International Journal of Computer Vision 130 (9) (2022) 2337–2348
work page 2022
-
[24]
K. Zhou, J. Yang, C. C. Loy, Z. Liu, Conditional prompt learning for vision-language models, in: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 16816–16825
work page 2022
-
[25]
Y. Du, F. Wei, Z. Zhang, M. Shi, Y. Gao, G. Li, Learning to prompt for open-vocabulary object detection with vision-language model, in: Pro- ceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 14084–14093
work page 2022
-
[26]
H. Li, R. Zhang, H. Yao, X. Song, Y. Hao, Y. Zhao, L. Li, Y. Chen, Learning domain-aware detection head with prompt tuning, Advances in Neural Information Processing Systems 36 (2023) 4248–4262
work page 2023
- [27]
-
[28]
S. Ren, K. He, R. Girshick, J. Sun, Faster r-cnn: Towards real-time object detection with region proposal networks, IEEE Transactions on Pattern Analysis and Machine Intelligence 39 (6) (2016) 1137–1149
work page 2016
-
[29]
K. He, X. Zhang, S. Ren, J. Sun, Deep residual learning for image recog- nition, in: Proceedings of the IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition, 2016, pp. 770–778
work page 2016
-
[30]
A. Radford, J. W. Kim, C. Hallacy, A. Ramesh, G. Goh, S. Agarwal, G. Sastry, A. Askell, P. Mishkin, J. Clark, et al., Learning transferable 33 visual models from natural language supervision, in: Proceedings of the 38th International Conference on Machine Learning, PMLR, 2021, pp. 8748–8763
work page 2021
-
[31]
A. Tarvainen, H. Valpola, Mean teachers are better role models: Weight- averaged consistency targets improve semi-supervised deep learning re- sults, Advances in neural information processing systems 30 (2017)
work page 2017
-
[32]
R. Geirhos, J.-H. Jacobsen, C. Michaelis, R. Zemel, W. Brendel, M. Bethge, F. A. Wichmann, Shortcut learning in deep neural networks, Nature Machine Intelligence 2 (11) (2020) 665–673
work page 2020
-
[33]
K. He, G. Gkioxari, P. Dollár, R. Girshick, Mask r-cnn, in: Proceedings of the IEEE/CVF International Conference on Computer Vision, 2017, pp. 2961–2969
work page 2017
-
[34]
X. Pan, P. Luo, J. Shi, X. Tang, Two at once: Enhancing learning and generalization capacities via ibn-net, in: Proceedings of the European Conference on Computer Vision, 2018, pp. 464–479
work page 2018
-
[35]
T.-Y. Ross, G. Dollár, Focal loss for dense object detection, in: Proceed- ings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2017, pp. 2980–2988
work page 2017
- [36]
-
[37]
Y. Wu,A. Kirillov, F.Massa,W.-Y. Lo, R.Girshick,Detectron2,https: //github.com/facebookresearch/detectron2(2019)
work page 2019
-
[38]
F. Yu, H. Chen, X. Wang, W. Xian, Y. Chen, F. Liu, V. Madhavan, T. Darrell, Bdd100k: A diverse driving dataset for heterogeneous mul- titask learning, in: Proceedings of the IEEE/CVF Conference on Com- puter Vision and Pattern Recognition, 2020, pp. 2636–2645
work page 2020
-
[39]
M. Cordts, M. Omran, S. Ramos, T. Rehfeld, M. Enzweiler, R. Benen- son, U. Franke, S. Roth, B. Schiele, The cityscapes dataset for semantic urban scene understanding, in: Proceedings of the IEEE/CVF Confer- ence on Computer Vision and Pattern Recognition, 2016, pp. 3213–3223. 34
work page 2016
- [40]
-
[41]
T.-Y. Lin, M. Maire, S. Belongie, J. Hays, P. Perona, D. Ramanan, P. Dollár, C. L. Zitnick, Microsoft coco: Common objects in context, in: Proceedings of the European Conference on Computer Vision, Springer, 2014, pp. 740–755
work page 2014
-
[42]
Synscapes: A Photorealistic Synthetic Dataset for Street Scene Parsing
M. Wrenninge, J. Unger, Synscapes: A photorealistic synthetic dataset for street scene parsing, arXiv preprint arXiv:1810.08705 (2018)
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[43]
H. Zhao, S. Zhang, G. Wu, J. M. Moura, J. P. Costeira, G. J. Gordon, Adversarial multiple source domain adaptation, Advances in neural in- formation processing systems 31 (2018)
work page 2018
-
[44]
X. Peng, Q. Bai, X. Xia, Z. Huang, K. Saenko, B. Wang, Moment matching for multi-source domain adaptation, in: Proceedings of the IEEE/CVF International Conference on Computer Vision, 2019, pp. 1406–1415
work page 2019
- [45]
-
[46]
D. Li, A. Wu, Y. Wang, Y. Han, Prompt-driven dynamic object- centric learning for single domain generalization, in: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 17606–17615
work page 2024
-
[47]
M. S. Danish, M. H. Khan, M. A. Munir, M. S. Sarfraz, M. Ali, Improv- ing single domain-generalized object detection: A focus on diversification and alignment, in: Proceedings of the IEEE/CVF Conference on Com- puter Vision and Pattern Recognition, 2024, pp. 17732–17742
work page 2024
-
[48]
F. Wu, J. Gao, L. Hong, X. Wang, C. Zhou, N. Ye, G-nas: Generalizable neural architecture search for single domain generalization object detec- tion, in: Proceedings of the AAAI Conference on Artificial Intelligence, Vol. 38, 2024, pp. 5958–5966. 35
work page 2024
-
[49]
W. Lee, D. Hong, H. Lim, H. Myung, Object-aware domain generaliza- tion for object detection, in: Proceedings of the AAAI Conference on Artificial Intelligence, Vol. 38, 2024, pp. 2947–2955
work page 2024
-
[50]
X. Xu, J. Yang, W. Shi, S. Ding, L. Luo, J. Liu, Physaug: A physical- guided and frequency-based data augmentation for single-domain gen- eralized object detection, in: Proceedings of the AAAI Conference on Artificial Intelligence, Vol. 39, 2025, pp. 21815–21823
work page 2025
-
[51]
B. He, Y. Ji, Q. Ye, Z. Tan, L. Wu, Generalized diffusion detector: Min- ing robust features from diffusion models for domain-generalized detec- tion, in: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2025, pp. 9921–9932
work page 2025
-
[52]
C. Sakaridis, D. Dai, L. Van Gool, Semantic foggy scene understand- ing with synthetic data, International Journal of Computer Vision 126 (2018) 973–992
work page 2018
-
[53]
M. Hassaballah, M. A. Kenk, K. Muhammad, S. Minaee, Vehicle detec- tion and tracking in adverse weather using a deep learning framework, IEEE Transactions on Intelligent Transportation Systems 22 (7) (2020) 4230–4242
work page 2020
-
[54]
A. Wu, R. Liu, Y. Han, L. Zhu, Y. Yang, Vector-decomposed disentan- glement for domain-invariant object detection, in: Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021, pp. 9342–9351
work page 2021
-
[55]
M. Everingham, S. M. A. Eslami, L. Van Gool, C. K. I. Williams, J. Winn, A. Zisserman, The pascal visual object classes challenge: A retrospective, International Journal of Computer Vision 111 (1) (2015) 98–136
work page 2015
- [56]
-
[57]
A. Wu, C. Deng, Single-domain generalized object detection in ur- ban scene via cyclic-disentangled self-distillation, in: Proceedings of the 36 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 847–856
work page 2022
-
[58]
P. Sharma, N. Ding, S. Goodman, R. Soricut, Conceptual captions: A cleaned, hypernymed, image alt-text dataset for automatic image cap- tioning, in: Proceedings of the 56th Annual Meeting of the Association for Computational Linguistics (Volume 1: Long Papers), 2018, pp. 2556– 2565
work page 2018
-
[59]
A. Eftekhar, A. Sax, J. Malik, A. Zamir, Omnidata: A scalable pipeline for making multi-task mid-level vision datasets from 3d scans, in: Pro- ceedings of the IEEE/CVF International Conference on Computer Vi- sion, 2021, pp. 10786–10796
work page 2021
-
[60]
L. Castrejon, Y. Aytar, C. Vondrick, H. Pirsiavash, A. Torralba, Learn- ing aligned cross-modal representations from weakly aligned data, in: Proceedings of the IEEE/CVF Conference on Computer Vision and Pat- tern Recognition, 2016, pp. 2940–2949
work page 2016
-
[61]
M. J. Wilber, C. Fang, H. Jin, A. Hertzmann, J. Collomosse, S. Belongie, Bam! the behance artistic media dataset for recognition beyond photog- raphy, in: Proceedings of the IEEE/CVF International Conference on Computer Vision, 2017, pp. 1202–1211. 37
work page 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.