Recognition: 2 theorem links
· Lean TheoremWhen Does Hierarchy Help? Benchmarking Agent Coordination in Event-Driven Industrial Scheduling
Pith reviewed 2026-05-14 02:14 UTC · model grok-4.3
The pith
Different coordination paradigms for agents in event-driven scheduling each carry distinct trade-offs in robustness, efficiency, alignment, and communication load.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
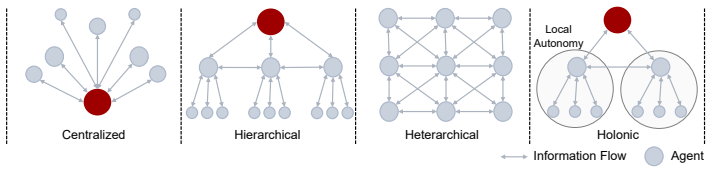
Our controlled evaluations reveal clear coordination trade-offs: centralized coordination is robust and communication-efficient but scales poorly with difficulty; hierarchical coordination improves efficiency through decomposition but suffers from cross-level misalignment; heterarchical coordination is flexible but communication-heavy; and holonic coordination satisfies constraints well but loses global robustness.
What carries the argument
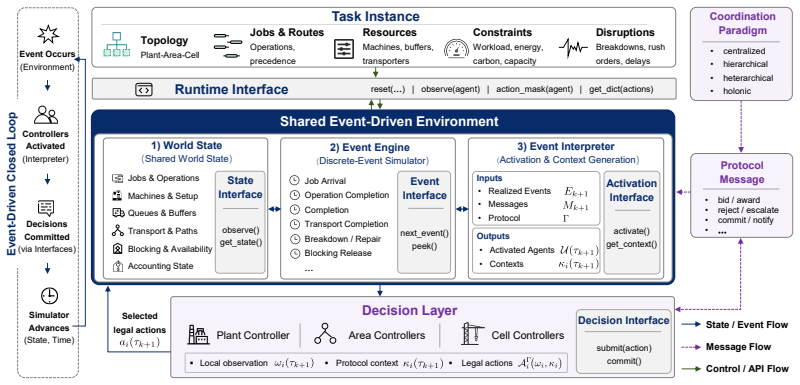
DESBench, a benchmark on a shared discrete-event driven environment that supplies tasks and metrics for effectiveness, constraint alignment, coordination efficiency, and robustness across four paradigms distinguished by their mechanisms of information flow, decision authority, and conflict resolution.
If this is right
- Centralized coordination remains robust and communication-efficient yet cannot handle rising task difficulty.
- Hierarchical coordination gains efficiency by decomposing problems but creates misalignment between decision levels.
- Heterarchical coordination preserves flexibility at the price of higher communication demands.
- Holonic coordination meets local constraints reliably yet fails to preserve overall system robustness.
Where Pith is reading between the lines
- Future agent systems could benefit from hybrid or adaptive coordination that switches structure according to current difficulty or observability level.
- Benchmarks limited to outcome metrics will continue to overestimate the practical readiness of multi-agent systems for dynamic coupled environments.
- Extending the same evaluation protocol to settings with stronger inter-agent coupling or longer time horizons would test whether the observed trade-off patterns persist.
Load-bearing premise
The four chosen coordination paradigms and the tasks and metrics defined in DESBench sufficiently capture the essential mechanisms of information flow, decision authority, and conflict resolution in real event-driven industrial systems that have partial observability.
What would settle it
Running identical scheduling scenarios on a physical industrial testbed that includes real sensor noise and communication delays and observing that centralized coordination scales without loss of robustness while holonic coordination retains global robustness would contradict the reported trade-offs.
Figures
read the original abstract
Recent advances in agent and multi-agent systems have shown strong performance on tool use, reasoning, and collaborative tasks. However, existing benchmarks mostly evaluate task completion in weakly coupled environments, and provide limited support for studying coordination in shared, dynamically evolving systems with hierarchy and coupled constraints. This leaves an important question underexplored: when do different coordination paradigms succeed or fail? We introduce Distributed Event-driven Scheduling Benchmark (DESBench), a benchmark for evaluating agent coordination in hierarchical event-driven scheduling. Built on a shared discrete-event driven environment in industrial scheduling, our benchmark captures multi-timescale decision making, partial observability, and dynamically coupled constraints. We define tasks and metrics that evaluate effectiveness, constraint alignment, coordination efficiency, and robustness, and focus on four representative coordination paradigms: centralized, hierarchical, heterarchical, and holonic. These paradigms correspond to distinct mechanisms of information flow, decision authority, and conflict resolution. Our controlled evaluations reveal clear coordination trade-offs: centralized coordination is robust and communication-efficient but scales poorly with difficulty; hierarchical coordination improves efficiency through decomposition but suffers from cross-level misalignment; heterarchical coordination is flexible but communication-heavy; and holonic coordination satisfies constraints well but loses global robustness. These findings demonstrate that coordination design fundamentally shapes agent system behavior in complex environments, revealing structural trade-offs that cannot be captured by outcome metrics alone and underscoring the imperative for more adaptive, principled, and dynamic coordination mechanisms in future MAS research.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces DESBench, a benchmark for agent coordination in hierarchical event-driven industrial scheduling with partial observability and coupled constraints. It evaluates four paradigms (centralized, hierarchical, heterarchical, holonic) on metrics for effectiveness, constraint alignment, coordination efficiency, and robustness, claiming that controlled evaluations reveal specific trade-offs: centralized is robust and communication-efficient but scales poorly; hierarchical improves efficiency via decomposition but suffers cross-level misalignment; heterarchical is flexible but communication-heavy; and holonic satisfies constraints well but loses global robustness.
Significance. If the evaluations isolate coordination effects from other factors, the benchmark and trade-off findings would provide useful empirical guidance on coordination design in complex MAS for dynamic industrial settings, emphasizing structural properties beyond aggregate performance metrics and motivating more adaptive mechanisms.
major comments (1)
- [Evaluation section / abstract] The central claim that 'controlled evaluations reveal clear coordination trade-offs' is load-bearing but unsupported in detail: no quantitative results, error bars, data-exclusion rules, or experimental protocol are supplied, and it is unclear whether a common agent substrate was used or whether planning algorithms, observation models, reward shaping, event generation rates, and constraint tightness were held fixed across paradigms (see § on evaluations and the abstract's description of the four paradigms). Without explicit controls, reported differences cannot be attributed to information flow, decision authority, and conflict resolution mechanisms alone.
minor comments (1)
- [Abstract] The abstract asserts specific trade-offs without referencing any tables, figures, or quantitative values that demonstrate them.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback, which highlights important areas for strengthening the clarity and rigor of our evaluation methodology. We address the major comment point by point below and will revise the manuscript to incorporate the requested details.
read point-by-point responses
-
Referee: [Evaluation section / abstract] The central claim that 'controlled evaluations reveal clear coordination trade-offs' is load-bearing but unsupported in detail: no quantitative results, error bars, data-exclusion rules, or experimental protocol are supplied, and it is unclear whether a common agent substrate was used or whether planning algorithms, observation models, reward shaping, event generation rates, and constraint tightness were held fixed across paradigms (see § on evaluations and the abstract's description of the four paradigms). Without explicit controls, reported differences cannot be attributed to information flow, decision authority, and conflict resolution mechanisms alone.
Authors: We agree that the evaluation section would benefit from more explicit documentation to fully substantiate the controlled nature of the experiments. In the revised manuscript, we will expand the relevant section to include quantitative results (means and standard deviations across repeated trials) with error bars, explicit data-exclusion rules, and a detailed experimental protocol. All four paradigms were evaluated on a common agent substrate with planning algorithms, observation models, reward shaping, event generation rates, and constraint tightness held fixed; only the coordination mechanisms (information flow, decision authority, and conflict resolution) were varied. We will add a dedicated subsection and table that explicitly lists these fixed parameters alongside the varying coordination structures, enabling readers to attribute observed differences directly to the paradigms under study. revision: yes
Circularity Check
No circularity: empirical benchmark comparison with independent evaluations
full rationale
The paper introduces DESBench as an empirical benchmark for comparing four coordination paradigms (centralized, hierarchical, heterarchical, holonic) in event-driven scheduling. The central claims consist of observed trade-offs in robustness, efficiency, misalignment, and constraint satisfaction drawn from controlled evaluations. No derivations, equations, fitted parameters, or predictions are present that reduce to quantities defined inside the paper. The work contains no self-citation load-bearing steps, uniqueness theorems, or ansatzes; all reported results are external to any internal definitions and rest on the benchmark tasks and metrics themselves. This is a standard empirical study whose findings are falsifiable against the described environment and do not exhibit any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The four coordination paradigms (centralized, hierarchical, heterarchical, holonic) correspond to distinct mechanisms of information flow, decision authority, and conflict resolution.
invented entities (1)
-
DESBench
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclearWe focus on four representative coordination paradigms: centralized, hierarchical, heterarchical, and holonic... Our controlled evaluations reveal clear coordination trade-offs
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel uncleareffectiveness, constraint alignment, coordination efficiency, and robustness
Reference graph
Works this paper leans on
-
[1]
Shuiguang Deng, Hailiang Zhao, Ziqi Wang, Guanjie Cheng, Peng Chen, Wenzhuo Qian, Zhiwei Ling, Jianwei Yin, Albert Y Zomaya, and Schahram Dustdar. Agentic services computing. arXiv preprint arXiv:2509.24380, 2025
-
[2]
Xinyi Li, Sai Wang, Siqi Zeng, Yu Wu, and Yi Yang. A survey on llm-based multi-agent systems: workflow, infrastructure, and challenges.Vicinagearth, 1(1):9, 2024
work page 2024
-
[3]
Overcoming the sim-to-real gap: Leveraging simulation to learn to explore for real-world rl
Andrew Wagenmaker, Kevin Huang, Liyiming Ke, Kevin Jamieson, and Abhishek Gupta. Overcoming the sim-to-real gap: Leveraging simulation to learn to explore for real-world rl. Advances in Neural Information Processing Systems, 37:78715–78765, 2024
work page 2024
-
[4]
Modeling complex system dynamics with flow matching across time and conditions
Martin Rohbeck, Edward De Brouwer, Charlotte Bunne, Jan-Christian Huetter, Anne Biton, Kelvin Y Chen, Aviv Regev, and Romain Lopez. Modeling complex system dynamics with flow matching across time and conditions. InThe Thirteenth International Conference on Learning Representations, 2025
work page 2025
-
[5]
Multiagentbench: Evaluating the collaboration and competition of llm agents
Kunlun Zhu, Hongyi Du, Zhaochen Hong, Xiaocheng Yang, Shuyi Guo, Daisy Zhe Wang, Zhenhailong Wang, Cheng Qian, Robert Tang, Heng Ji, et al. Multiagentbench: Evaluating the collaboration and competition of llm agents. InProceedings of the 63rd Annual Meeting of the Association for Computational Linguistics (Volume 1: Long Papers), pages 8580–8622, 2025
work page 2025
-
[6]
Wei Wang, Dan Zhang, Tao Feng, Boyan Wang, and Jie Tang. Battleagentbench: A benchmark for evaluating cooperation and competition capabilities of language models in multi-agent systems, 2024. URLhttps://arxiv.org/abs/2408.15971
-
[7]
Multi-agent coordination across diverse applications: A survey.arXiv preprint arXiv:2502.14743, 2025
Lijun Sun, Yijun Yang, Qiqi Duan, Yuhui Shi, Chao Lyu, Yu-Cheng Chang, Chin-Teng Lin, and Yang Shen. Multi-agent coordination across diverse applications: A survey.arXiv preprint arXiv:2502.14743, 2025
-
[8]
Yufan Dang, Chen Qian, Xueheng Luo, Jingru Fan, Zihao Xie, Ruijie Shi, Weize Chen, Cheng Yang, Xiaoyin Che, Ye Tian, Xuantang Xiong, Lei Han, Zhiyuan Liu, and Maosong Sun. Multi- agent collaboration via evolving orchestration.Advances in Neural Information Processing Systems, 2025
work page 2025
-
[9]
Multi-agent guided policy optimization.arXiv preprint arXiv:2507.18059, 2025
Yueheng Li, Guangming Xie, and Zongqing Lu. Multi-agent guided policy optimization.arXiv preprint arXiv:2507.18059, 2025
-
[10]
Zhuofan Xu, Benedikt Bollig, Matthias Függer, Thomas Nowak, and Vincent Le Dréau. Central- ized permutation equivariant policy for cooperative multi-agent reinforcement learning.arXiv preprint arXiv:2508.11706, 2025
-
[11]
Ziluo Ding, Zeyuan Liu, Zhirui Fang, Kefan Su, Liwen Zhu, and Zongqing Lu. Multi-agent coordination via multi-level communication.Advances in Neural Information Processing Systems, 37:118513–118539, 2024
work page 2024
-
[12]
Hm-rag: Hierarchical multi-agent multimodal retrieval augmented generation
Pei Liu, Xin Liu, Ruoyu Yao, Junming Liu, Siyuan Meng, Ding Wang, and Jun Ma. Hm-rag: Hierarchical multi-agent multimodal retrieval augmented generation. InProceedings of the 33rd ACM international conference on multimedia, pages 2781–2790, 2025
work page 2025
-
[13]
Hiva: Self-organized hierarchical variable agent via goal-driven semantic-topological evolution
Jinzhou Tang, Jusheng Zhang, Qinhan Lv, Sidi Liu, Jing Yang, Chengpei Tang, and Keze Wang. Hiva: Self-organized hierarchical variable agent via goal-driven semantic-topological evolution. InProceedings of the AAAI Conference on Artificial Intelligence, volume 40, pages 2083–2091, 2026
work page 2083
-
[14]
Xianghua Zeng, Hao Peng, Dingli Su, and Angsheng Li. Hierarchical decision making based on structural information principles.Journal of Machine Learning Research, 26(182):1–55, 2025
work page 2025
-
[15]
Agentnet: Decentralized evolutionary coordination for llm-based multi-agent systems
Yingxuan Yang, Huacan Chai, Shuai Shao, Yuanyi Song, Siyuan Qi, Renting Rui, and Weinan Zhang. Agentnet: Decentralized evolutionary coordination for llm-based multi-agent systems. Advances in Neural Information Processing Systems, 2025. 10
work page 2025
-
[16]
Comas: Co-evolving multi-agent systems via interaction rewards
Xiangyuan Xue, Yifan Zhou, Guibin Zhang, Zaibin Zhang, Yijiang Li, Chen Zhang, Zhenfei Yin, Philip Torr, Wanli Ouyang, and Lei Bai. Comas: Co-evolving multi-agent systems via interaction rewards. InThe Fourteenth International Conference on Learning Representations, 2026
work page 2026
-
[17]
Chiqiang Liu and Dazi Li. Hygma: Hypergraph coordination networks with dynamic grouping for multi-agent reinforcement learning.arXiv preprint arXiv:2505.07207, 2025
- [18]
-
[19]
Hung Du, Srikanth Thudumu, Hy Nguyen, Rajesh Vasa, and Kon Mouzakis. Contextual knowledge sharing in multi-agent reinforcement learning with decentralized communication and coordination.arXiv preprint arXiv:2501.15695, 2025
-
[20]
Marjan Keramati, Sauleh Etemedi, and Nasser Mozayani. Hmlb: Holonic multi-agent approach for preventive controllers load-balancing in sdn-enabled smart grid.Computer Communications, 228:107984, 2024
work page 2024
-
[21]
Florian Grötschla, Luis Müller, Jan Tönshoff, Mikhail Galkin, and Bryan Perozzi. Agentsnet: Coordination and collaborative reasoning in multi-agent llms.arXiv preprint arXiv:2507.08616, 2025
-
[22]
Gem- mas: Graph-based evaluation metrics for multi agent systems
Jisoo Lee, Raeyoung Chang, Dongwook Kwon, Harmanpreet Singh, and Nikhil Verma. Gem- mas: Graph-based evaluation metrics for multi agent systems. InProceedings of the 2025 Conference on Empirical Methods in Natural Language Processing: Industry Track, pages 1522–1532, 2025
work page 2025
-
[23]
Llm-based multi-agent systems: Frameworks, evaluation, open chal- lenges, and research frontiers
Soharab Hossain Shaikh. Llm-based multi-agent systems: Frameworks, evaluation, open chal- lenges, and research frontiers. InInternational Joint Conference on Computational Intelligence, pages 149–170. Springer, 2025
work page 2025
-
[24]
Kunal Menda, Yi-Chun Chen, Justin Grana, James W. Bono, Brendan D. Tracey, Mykel J. Kochenderfer, and David Wolpert. Deep reinforcement learning for event-driven multi-agent decision processes.IEEE Transactions on Intelligent Transportation Systems, 20(4):1259–1268,
-
[25]
doi: 10.1109/TITS.2018.2848264
-
[26]
Moseac: Streamlined variable time step reinforcement learning.arXiv preprint arXiv:2406.01521, 2024
Dong Wang and Giovanni Beltrame. Moseac: Streamlined variable time step reinforcement learning.arXiv preprint arXiv:2406.01521, 2024
-
[27]
Damien Trentesaux, Cyrille Pach, Abdelghani Bekrar, Yves Sallez, Thierry Berger, Thérèse Bonte, Paulo Leitão, and José Barbosa. Benchmarking flexible job-shop scheduling and control systems.Control Engineering Practice, 21(9):1204–1225, 2013. ISSN 0967-0661. doi: https://doi.org/10.1016/j.conengprac.2013.05.004. URL https://www.sciencedirect. com/science/...
-
[28]
Olivier Cardin and Anne L’Anton. Proposition of an implementation framework enabling benchmarking of holonic manufacturing systems.CoRR, abs/1901.05669, 2019. URL http: //arxiv.org/abs/1901.05669
-
[29]
A production scheduling framework for reinforcement learning under real-world constraints
Jonathan Hoss, Felix Schelling, and Noah Klarmann. A production scheduling framework for reinforcement learning under real-world constraints. In2025 IEEE 21st International Conference on Automation Science and Engineering (CASE), pages 1736–1743. IEEE, 2025
work page 2025
-
[30]
Jialin Wang and Zhihua Duan. Agent ai with langgraph: A modular framework for enhancing machine translation using large language models.arXiv preprint arXiv:2412.03801, 2024
-
[31]
Agentscope: A flexible yet robust multi-agent platform.arXiv preprint arXiv:2402.14034, 2024
Dawei Gao, Zitao Li, Xuchen Pan, Weirui Kuang, Zhijian Ma, Bingchen Qian, Fei Wei, Wenhao Zhang, Yuexiang Xie, Daoyuan Chen, et al. Agentscope: A flexible yet robust multi-agent platform.arXiv preprint arXiv:2402.14034, 2024
-
[32]
David J Moore. A taxonomy of hierarchical multi-agent systems: Design patterns, coordination mechanisms, and industrial applications.arXiv preprint arXiv:2508.12683, 2025. 11
-
[33]
Limengxi Yue, Duo Xu, Dong Qiu, Yanpei Shi, Shuyang Xu, and Manish Shah. Sequential cooperative multi-agent online learning and adaptive coordination control in dynamic and uncertain environments. In2025 5th International Conference on Electronic Information Engineering and Computer Communication (EIECC), pages 692–697. IEEE, 2025
work page 2025
-
[34]
Cp-agentnet: Autonomous and explainable communication protocol design using generative agents
Dae Cheol Kwon and Xinyu Zhang. Cp-agentnet: Autonomous and explainable communication protocol design using generative agents. In2025 IEEE 33rd International Conference on Network Protocols (ICNP), pages 1–12. IEEE, 2025
work page 2025
-
[35]
Amas: Adaptively determining communication topology for llm-based multi-agent system
Hui Yi Leong, Yuheng Li, Yuqing Wu, Wenwen Ouyang, Wei Zhu, Jiechao Gao, and Wei Han. Amas: Adaptively determining communication topology for llm-based multi-agent system. In Proceedings of the 2025 Conference on Empirical Methods in Natural Language Processing: Industry Track, pages 2061–2070, 2025. A Additional Environment and Runtime Details One decisi...
work page 2025
-
[36]
Starting from the post-decision state x+ τk, the event engine advances autonomously until the next decision-relevant stopping point is reached, yielding a new pre-decision state x− τk+1 together with realized world eventsE k+1
-
[37]
The event interpreter combines these world events with any newly materialized protocol-level objectsM k+1 and computes the next activated setU(τ k+1)
-
[38]
For each activated agenti∈ U(τ k+1), the runtime constructs the benchmark-visible decision boundary (local observation), a protocol context, and a protocol-conditioned legal action set
-
[39]
Returned actions are validated, committed to the event engine, and written back as updated state and protocol artifacts. A.1 Event Engine The event engine is the shared discrete-event scheduling substrate used by all coordination protocols. It advances physical production time, realizes environment events, updates job, machine, buffer, transport, blocking...
-
[40]
World-event activations, induced by newly realized environment events such as release op- portunities, completion-triggered routing, queue-state changes, budget alarms, breakdowns, or repairs
-
[41]
Protocol-object activations, induced by coordination objects addressed to a specific agent, such as assignment requests, parent-to-child allocations, child feedback, settlement notices, rejection records, or escalation requests. Only agents in U(τ k) are required to act at epoch τk, and the activated set itself is an output of the event interpreter. Contr...
work page 1966
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.