Recognition: no theorem link
Decoupled Planning for Multiple Omega-Regular Objectives
Pith reviewed 2026-05-14 01:35 UTC · model grok-4.3
The pith
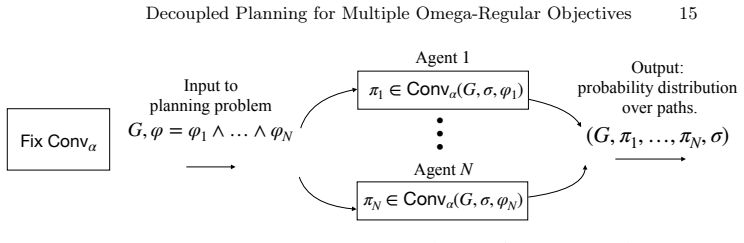
Agents satisfy multiple omega-regular objectives on a graph through independent local policies composed by a scheduler if they follow pre-agreed conventions specific to each objective class.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The conjunction of omega-regular objectives can be realized by composing independent finite-memory policies via an oblivious scheduler when agents adhere to minimally restrictive conventions chosen for the objective class. Büchi objectives permit universal composition without scheduler communication, co-Büchi objectives require only knowledge of whether the agent was scheduled, and parity objectives require knowledge of which agent was scheduled.
What carries the argument
The conventions: simple restrictions on policy behavior agreed upon in advance that ensure the scheduler's composition satisfies every objective.
If this is right
- Büchi objectives admit universal composition of finite-memory policies without any scheduler communication.
- Co-Büchi objectives can be satisfied with only knowledge of whether the agent was scheduled.
- Parity objectives require additional knowledge of which agent was scheduled.
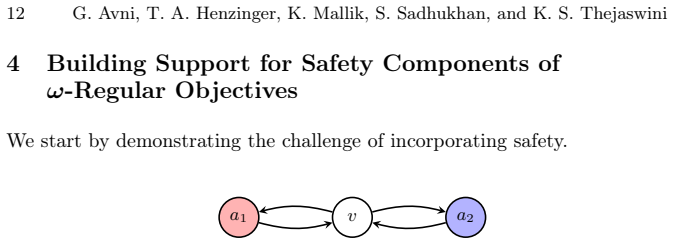
- Safety objectives cannot be handled in a fully decentralized way and need a protocol to synchronize on maximal safe actions.
Where Pith is reading between the lines
- Modular design of controllers for multiple tasks becomes possible without sharing full information about the environment.
- This could extend to other classes of objectives by defining appropriate conventions for each.
- Applications in autonomous systems might allow tasks to be assigned to separate modules that coordinate only through the scheduler.
Load-bearing premise
All agents agree in advance on the conventions, and the conjunction of the objectives is realizable on the graph.
What would settle it
Find a graph where the joint objectives are realizable but any set of policies following the stated conventions for Büchi objectives produces a violating path under a fair stochastic scheduler.
Figures


read the original abstract
We study the problem of generating paths on a graph that satisfy a collection of {\omega}-regular objectives. We propose a decoupled framework in which each objective is assigned to an independent agent that selects a local policy, while a scheduler -- oblivious to the graph and objective -- dynamically composes these policies into a single path. We ask when such a composition satisfies all objectives, assuming their conjunction is realizable. The framework enables modular policy design but raises fundamental compositional challenges. We show that even extremely fair deterministic schedulers do not ensure correctness, and that stochastic schedulers, while necessary, are insufficient without coordination. For safety objectives, we demonstrate that fully decentralized implementations are impossible, and we introduce a protocol for synchronizing on maximal safe actions. For non-safety objectives, we introduce conventions -- simple, a priori restrictions agreed upon before the graph or objectives are revealed -- that guarantee satisfaction of all objectives when followed by all agents. We characterize minimally restrictive conventions for major subclasses of {\omega}-regular objectives. In particular, B\"uchi objectives admit universal composition of finite-memory policies without scheduler communication; co-B\"uchi objectives require only knowledge of whether the agent was scheduled; and parity objectives additionally require knowledge of which agent was scheduled.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a decoupled framework for generating paths satisfying multiple ω-regular objectives on a graph, assigning each objective to an independent agent that selects a local policy; these are dynamically composed by a scheduler oblivious to the graph and objectives. Assuming the conjunction is realizable, it shows deterministic schedulers (even fair ones) fail to guarantee correctness, stochastic schedulers require additional coordination, and a priori conventions suffice for non-safety objectives. It characterizes minimally restrictive conventions: Büchi objectives allow universal finite-memory policy composition without scheduler communication; co-Büchi require only knowledge of whether the agent was scheduled; parity require additionally which agent was scheduled. A synchronization protocol is given for safety objectives.
Significance. If the characterizations and constructions hold, the work provides a valuable modular approach to multi-objective synthesis in automata theory and verification, reducing the need for centralized control while identifying the precise coordination required per objective class. The explicit use of conventions as a minimal, pre-agreed mechanism is a strength, as is the separation of scheduler obliviousness from agent-level knowledge.
major comments (1)
- [Main results on Büchi objectives] The central claim that Büchi objectives admit universal composition of finite-memory policies without scheduler communication (abstract and main results) rests on unverified steps in the provided summary; the manuscript must include the explicit policy construction and proof that finite memory suffices independently of the scheduler for all realizable conjunctions.
minor comments (2)
- [Framework section] Clarify the precise definition of 'oblivious to the graph and objective' for the scheduler and how it interacts with the stochastic requirement, perhaps with a formal definition in the framework section.
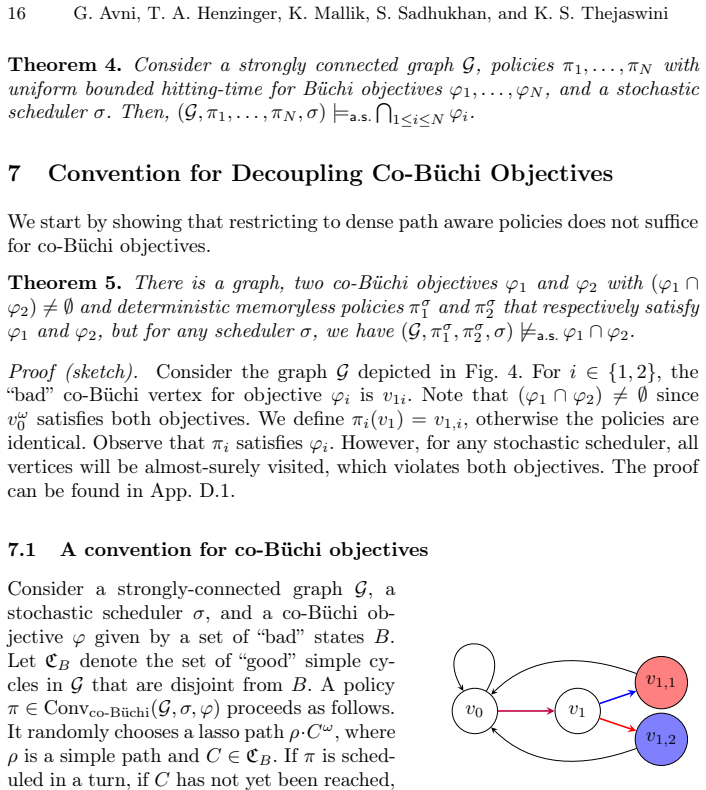
- [Safety objectives subsection] The safety objective protocol is mentioned but its integration with the convention-based approach for non-safety cases could be cross-referenced more explicitly for completeness.
Simulated Author's Rebuttal
We thank the referee for the careful reading, positive assessment of the work's significance, and recommendation for minor revision. We address the major comment below and will strengthen the manuscript accordingly.
read point-by-point responses
-
Referee: [Main results on Büchi objectives] The central claim that Büchi objectives admit universal composition of finite-memory policies without scheduler communication (abstract and main results) rests on unverified steps in the provided summary; the manuscript must include the explicit policy construction and proof that finite memory suffices independently of the scheduler for all realizable conjunctions.
Authors: We agree that the explicit policy construction and a fully detailed proof are required to substantiate the claim. The full manuscript presents the construction for Büchi objectives in Section 4.2, including the definition of the finite-memory policies and the argument that their composition satisfies the conjunction independently of the scheduler. However, we acknowledge that some verification steps were presented at a high level. In the revised version we will expand this section with a complete, self-contained proof that explicitly constructs the composed policy, verifies memory finiteness, and shows correctness for every realizable conjunction under arbitrary schedulers. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper's central claims rest on explicit assumptions (conjunction of objectives is realizable; agents pre-agree on class-specific conventions) and standard results from automata theory and realizability. No derivation reduces a prediction or theorem to a fitted parameter, self-definition, or self-citation chain. The characterizations for Büchi, co-Büchi, and parity objectives are derived from the framework's definitions of policies, schedulers, and conventions without circular reduction. The work is self-contained against external benchmarks in omega-regular games.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Omega-regular objectives are recognized by automata on infinite words
- domain assumption Conjunction of objectives is realizable when a satisfying path exists
Reference graph
Works this paper leans on
-
[1]
Distributed comput- ing2(3), 117–126 (1987)
Alpern, B., Schneider, F.B.: Recognizing safety and liveness. Distributed comput- ing2(3), 117–126 (1987)
work page 1987
-
[2]
In: International Conference on Computer Aided Verification
Anand, A., Nayak, S.P., Schmuck, A.K.: Synthesizing permissive winning strat- egy templates for parity games. In: International Conference on Computer Aided Verification. pp. 436–458. Springer (2023)
work page 2023
-
[3]
Avni, G., Henzinger, T.A., Chonev, V.: Infinite-duration bidding games. J. ACM 66(4), 31:1–31:29 (2019)
work page 2019
-
[4]
In: International Conference on Tools and Algorithms for the Construction and Analysis of Systems
Avni, G., Mallik, K., Sadhukhan, S.: Auction-based scheduling. In: International Conference on Tools and Algorithms for the Construction and Analysis of Systems. pp. 153–172. Springer (2024)
work page 2024
-
[5]
In: International Conference on Tools and Algorithms for the Construction and Analysis of Systems
Basset, N., Kwiatkowska, M., Topcu, U., Wiltsche, C.: Strategy synthesis for stochastic games with multiple long-run objectives. In: International Conference on Tools and Algorithms for the Construction and Analysis of Systems. pp. 256–271. Springer (2015)
work page 2015
-
[6]
Basset, N., Kwiatkowska, M., Wiltsche, C.: Compositional strategy synthesis for stochasticgameswithmultipleobjectives.InformationandComputation261,536– 587 (2018)
work page 2018
-
[7]
Billingsley, P.: Probability and Measure. Wiley, New York, 3rd edn. (1995)
work page 1995
-
[8]
Ren- diconti del Circolo Matematico di Palermo (1884-1940)27(1), 247–271 (Dec 1909)
Borel, É.: Les probabilités dénombrables et leurs applications arithmétiques. Ren- diconti del Circolo Matematico di Palermo (1884-1940)27(1), 247–271 (Dec 1909). https://doi.org/10.1007/BF03019651,https://doi.org/10.1007/BF03019651
-
[9]
Cantelli, F.: Sulla probabilista come limita della frequencza. Rend. Accad. Lincei 26, 39 (1917)
work page 1917
-
[10]
In:FirstInternationalConferenceontheQuantitativeEvaluationofSystems,2004
Chatterjee, K., De Alfaro, L., Henzinger, T.A.: Trading memory for randomness. In:FirstInternationalConferenceontheQuantitativeEvaluationofSystems,2004. QEST 2004. Proceedings. pp. 206–217. IEEE (2004)
work page 2004
-
[11]
arXiv preprint arXiv:1804.03453 (2018)
Chatterjee, K., Piterman, N.: Combinations of qualitative winning for stochastic parity games. arXiv preprint arXiv:1804.03453 (2018)
-
[12]
stanford university (1998) 20 G
De Alfaro, L.: Formal verification of probabilistic systems. stanford university (1998) 20 G. Avni, T. A. Henzinger, K. Mallik, S. Sadhukhan, and K. S. Thejaswini
work page 1998
-
[13]
In: Proceed- ings Fifteenth Annual IEEE Symposium on Logic in Computer Science (Cat
De Alfaro, L., Henzinger, T.A.: Concurrent omega-regular games. In: Proceed- ings Fifteenth Annual IEEE Symposium on Logic in Computer Science (Cat. No. 99CB36332). pp. 141–154. IEEE (2000)
work page 2000
-
[14]
In: 20th Annual IEEE Symposium on Logic in Computer Science (LICS’05)
Finkbeiner, B., Schewe, S.: Uniform distributed synthesis. In: 20th Annual IEEE Symposium on Logic in Computer Science (LICS’05). pp. 321–330. IEEE (2005)
work page 2005
-
[15]
Systems Engineering8, 29 – 40 (01 2005)
Guenov, M., Barker, S.: Application of axiomatic design and design structure ma- trix to the decomposition of engineering systems. Systems Engineering8, 29 – 40 (01 2005)
work page 2005
-
[16]
Procedia Technology23, 144–149 (2016)
Guruji, A.K., Agarwal, H., Parsediya, D.: Time-efficient A* algorithm for robot path planning. Procedia Technology23, 144–149 (2016)
work page 2016
-
[17]
Harel, D., Marron, A., Weiss, G.: Behavioral programming. Commun. ACM55(7), 90–100 (2012)
work page 2012
-
[18]
American Economic Review93(5), 1830–1836 (2003)
Hart, S., Mas-Colell, A.: Uncoupled dynamics do not lead to nash equilibrium. American Economic Review93(5), 1830–1836 (2003)
work page 2003
-
[19]
IIE Transactions46(2), 164–184 (2014)
Kagan, E., Ben-Gal, I.: A group testing algorithm with online informational learn- ing. IIE Transactions46(2), 164–184 (2014)
work page 2014
-
[20]
Klein, D., Manning, C.D.: A* parsing: Fast exact viterbi parse selection. In: Pro- ceedings of the 2003 Human Language Technology Conference of the North Amer- ican Chapter of the Association for Computational Linguistics. pp. 119–126 (2003)
work page 2003
-
[21]
In: Proceedings 16th Annual IEEE Symposium on Logic in Computer Science
Kupermann, O., Varfi, M.: Synthesizing distributed systems. In: Proceedings 16th Annual IEEE Symposium on Logic in Computer Science. pp. 389–398. IEEE (2001)
work page 2001
-
[22]
Games and Economic Behavior27(2), 229–264 (1999)
Lazarus, A.J., Loeb, D.E., Propp, J.G., Stromquist, W.R., Ullman, D.H.: Combi- natorial games under auction play. Games and Economic Behavior27(2), 229–264 (1999)
work page 1999
-
[23]
Lewis, D.: Convention: A philosophical study. John Wiley & Sons (2008)
work page 2008
-
[24]
In: Proceedings [1990] 31st Annual Symposium on Foundations of Computer Science
Pneuli, A., Rosner, R.: Distributed reactive systems are hard to synthesize. In: Proceedings [1990] 31st Annual Symposium on Foundations of Computer Science. pp. 746–757. IEEE (1990)
work page 1990
-
[25]
In: Pro- ceedings of the fifteenth annual ACM symposium on Theory of computing
Pnueli, A.: On the extremely fair treatment of probabilistic algorithms. In: Pro- ceedings of the fifteenth annual ACM symposium on Theory of computing. pp. 278–290 (1983)
work page 1983
-
[26]
Information and computation 103(1), 1–29 (1993)
Pnueli, A., Zuck, L.D.: Probabilistic verification. Information and computation 103(1), 1–29 (1993)
work page 1993
-
[27]
Journal of Artificial Intelligence Research48, 67–113 (2013)
Roijers, D.M., Vamplew, P., Whiteson, S., Dazeley, R.: A survey of multi-objective sequential decision-making. Journal of Artificial Intelligence Research48, 67–113 (2013)
work page 2013
- [28]
-
[29]
attempt”, since processi, attempts to visits its Büchi state. For each “attempt
Shiryaev,A.,Chibisov,D.:Probability-1.GraduateTextsinMathematics,Springer New York (2016) A Appendix for Section 3 We first state well-known results from measure theory that we use in our proofs. Theorem 8 (Carathéodory Extension Theorem [7]).LetΩbe a set and F0 be a field of subsets ofΩ. LetPbe a probability measure onF0. There exists a unique probabilit...
work page 2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.