Recognition: 2 theorem links
· Lean TheoremSwarm Network-as-a-Service (SNaaS)
Pith reviewed 2026-05-14 20:07 UTC · model grok-4.3
The pith
SNaaS uses drone swarms to compose on-demand connectivity services that adapt to meet SLA latency targets.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
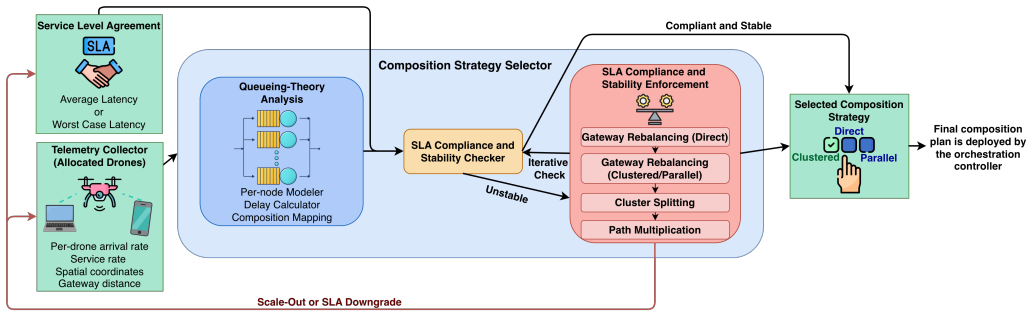
SNaaS formalizes atomic and composite services from drone interactions, uses an SDN-inspired architecture with provider-consumer-registry triad, and employs a queuing-based heuristic to choose composition strategy while an enforcement module adapts the swarm to maintain SLA compliance.
What carries the argument
The composition framework that orchestrates drones into end-to-end services using direct, clustered, or parallel strategies, selected by a queuing-theory-based heuristic.
If this is right
- Dynamic reconfiguration reduces SLA violations under changing loads.
- Performance improves with larger swarms compared to fixed setups.
- Queuing models enable predictive selection of service compositions.
- Integration of service registry allows consumers to request guaranteed connectivity on demand.
Where Pith is reading between the lines
- Such frameworks could extend to hybrid drone-ground networks for broader coverage.
- Real-time adaptation might integrate with edge computing for lower overhead.
- Scaling to very large swarms could require distributed heuristics beyond the current model.
Load-bearing premise
The queuing-theory heuristic accurately predicts drone interaction dynamics and the reconfiguration module incurs negligible overhead without violating other constraints.
What would settle it
A test where the queuing predictions deviate significantly from measured latencies under high load, or where reconfiguration delays cause additional SLA breaches.
Figures








read the original abstract
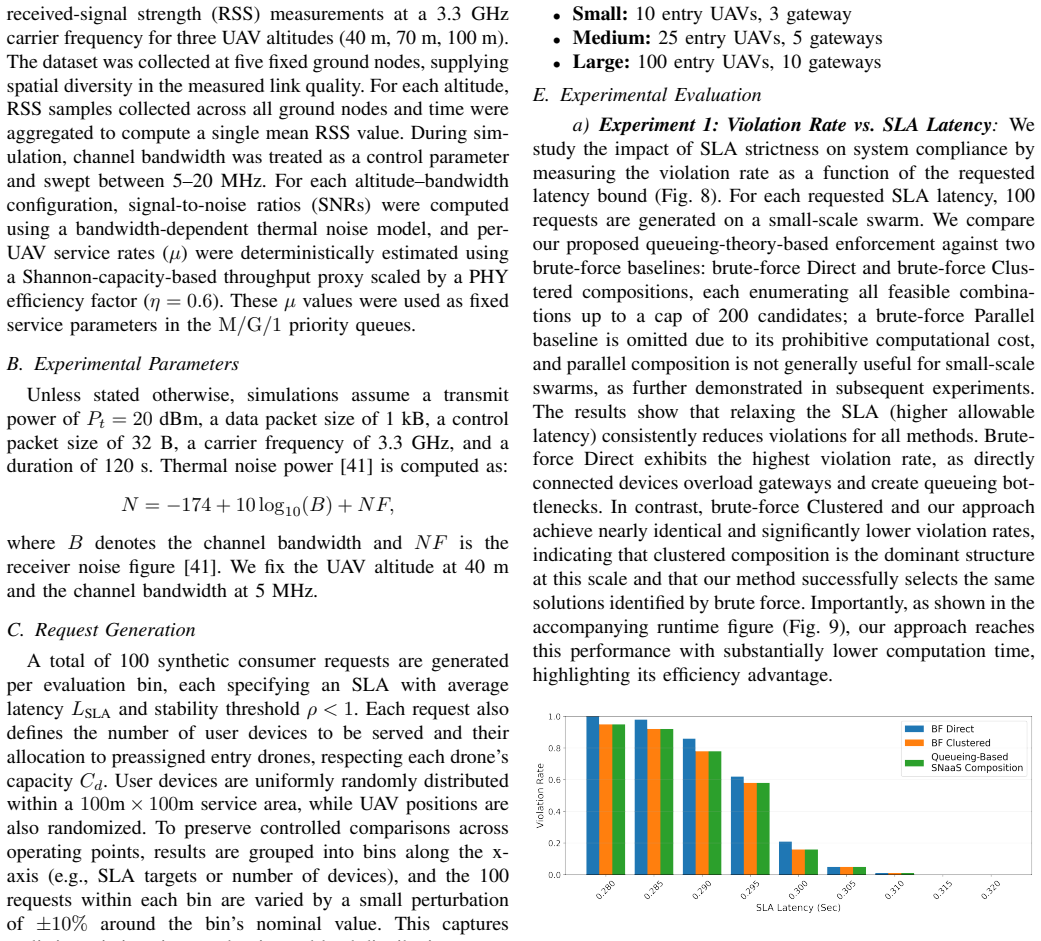
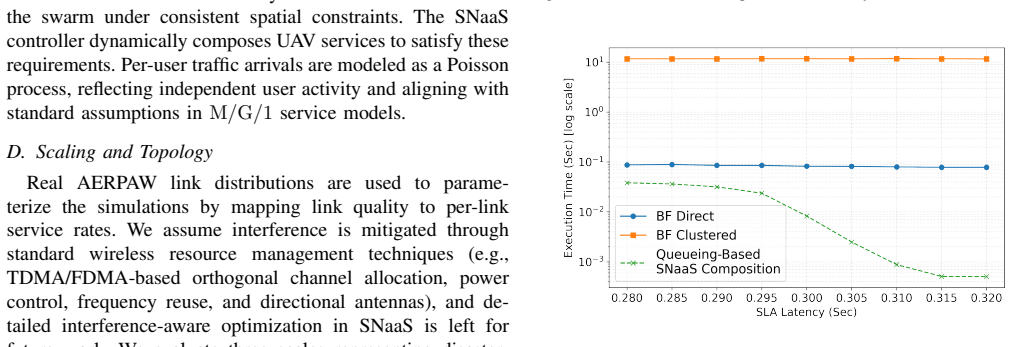
Emerging on-demand connectivity scenarios increasingly require networking solutions with stringent service-level guarantees. We propose Swarm Network-as-a-Service (SNaaS), a service-oriented framework that leverages fleets of drones to provide on-demand connectivity at scale. SNaaS explicitly models drone-to-device and drone-to-drone interactions as composable services, enabling consumers to request connectivity through Service-Level Agreements (SLAs). We formalize atomic and composite SNaaS services, present an SDN-inspired architecture that integrates the service-oriented triad of provider, consumer, and registry. We introduce a composition framework that orchestrates drones into end-to-end services. Within this framework, we define and analyze three composition strategies, i.e., direct, clustered, and parallel, and propose a queuing-theory-based heuristic for selecting the most suitable strategy under varying load conditions. A dedicated enforcement module continuously monitors queue stability and SLA latency, adaptively reconfiguring the swarm when violations occur. Experiments using real air-to-ground measurements show that the framework consistently outperforms fixed compositions, achieving lower latency, fewer SLA violations, and smoother adaptation as load and swarm size increase.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Swarm Network-as-a-Service (SNaaS), a service-oriented framework for on-demand drone-based connectivity. It formalizes atomic and composite services, presents an SDN-inspired architecture with provider-consumer-registry triad, defines three composition strategies (direct, clustered, parallel), and introduces a queuing-theory heuristic for adaptive strategy selection under load. An enforcement module monitors queue stability and SLA latency to trigger swarm reconfiguration. Experiments using real air-to-ground measurements claim consistent outperformance over fixed compositions in latency, SLA violations, and adaptation as load and swarm size vary.
Significance. If the central claims hold, the work offers a practical service-oriented model for dynamic drone networking with explicit SLA support, which could inform on-demand connectivity in scenarios such as disaster recovery or event coverage. The integration of real air-to-ground measurements for validation is a clear strength, as is the explicit treatment of composition strategies and adaptive enforcement; these elements provide a concrete basis for further systems work even if the queuing assumptions require refinement.
major comments (3)
- [Composition framework] Composition framework and heuristic section: the queuing-theory heuristic selects among direct/clustered/parallel strategies using load thresholds, yet the manuscript does not specify how these thresholds are derived from the air-to-ground measurements versus being post-hoc fitted; if the model parameters are internal, the reported latency and SLA gains may be partly by construction rather than predictive of true mobility-affected dynamics.
- [Experiments] Experiments section: the claim that the adaptive framework 'consistently outperforms fixed compositions' is not accompanied by exact baseline definitions (which fixed strategies were used?), number of independent runs, error bars, or statistical significance tests; without these, the quantitative improvements in latency and SLA violations cannot be fully verified from the reported results.
- [Enforcement module] Enforcement module: the assumption that reconfiguration occurs with negligible overhead and without violating other constraints (energy, interference) is load-bearing for the adaptation claims, but no analysis or measurement of reconfiguration latency or constraint violations is provided to support it.
minor comments (2)
- [Abstract] The abstract and introduction would benefit from a short table summarizing the three composition strategies and their key parameters for quick reference.
- [Architecture] Notation for service composition (atomic vs. composite) is introduced but not consistently cross-referenced to the architecture diagram; a single figure caption clarifying the mapping would improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments, which highlight important aspects of clarity, reproducibility, and assumption validation in our SNaaS manuscript. We address each major comment below and commit to revisions that strengthen the paper without altering its core contributions.
read point-by-point responses
-
Referee: [Composition framework] Composition framework and heuristic section: the queuing-theory heuristic selects among direct/clustered/parallel strategies using load thresholds, yet the manuscript does not specify how these thresholds are derived from the air-to-ground measurements versus being post-hoc fitted; if the model parameters are internal, the reported latency and SLA gains may be partly by construction rather than predictive of true mobility-affected dynamics.
Authors: The load thresholds were derived analytically from the empirical service-rate distributions extracted from our air-to-ground field measurements. We computed the crossover points at which each composition strategy meets the target SLA latency by substituting the measured channel parameters (path loss, fading statistics) into the closed-form queueing expressions for direct, clustered, and parallel service. In the revised manuscript we will add an explicit derivation subsection containing the measurement-derived parameter values, the resulting threshold equations, and a brief validation that the thresholds remain stable under small perturbations of the empirical distributions, thereby confirming they are predictive rather than post-hoc. revision: yes
-
Referee: [Experiments] Experiments section: the claim that the adaptive framework 'consistently outperforms fixed compositions' is not accompanied by exact baseline definitions (which fixed strategies were used?), number of independent runs, error bars, or statistical significance tests; without these, the quantitative improvements in latency and SLA violations cannot be fully verified from the reported results.
Authors: We agree that the experimental presentation must be made fully reproducible. In the revised Experiments section we will (i) explicitly state that the fixed baselines are the three non-adaptive strategies (direct, clustered, and parallel) run independently under identical load and swarm-size conditions, (ii) report that all results are averaged over 100 independent Monte-Carlo runs per scenario, (iii) include error bars denoting one standard deviation, and (iv) add statistical significance tests (one-way ANOVA followed by Tukey HSD post-hoc comparisons) between the adaptive policy and each fixed baseline. These additions will allow readers to verify the reported latency and SLA-violation improvements. revision: yes
-
Referee: [Enforcement module] Enforcement module: the assumption that reconfiguration occurs with negligible overhead and without violating other constraints (energy, interference) is load-bearing for the adaptation claims, but no analysis or measurement of reconfiguration latency or constraint violations is provided to support it.
Authors: The referee correctly identifies that our enforcement module relies on the assumption of negligible reconfiguration overhead. While this assumption is consistent with typical drone control-loop latencies reported in the literature, we did not quantify energy or interference costs. In the revision we will add a dedicated discussion subsection that (a) cites representative drone reconfiguration times, (b) presents a simulation-based sensitivity analysis showing how SLA compliance degrades as reconfiguration latency increases, and (c) explicitly lists energy and interference constraints as limitations to be addressed in future hardware-in-the-loop experiments. This will make the scope of the current claims transparent. revision: partial
Circularity Check
No significant circularity in SNaaS derivation or claims
full rationale
The paper's core chain—formalization of atomic/composite services, definition of three composition strategies, queuing-theory heuristic for selection under load, and enforcement module—relies on standard queuing models and external real air-to-ground measurements for validation. Experiments demonstrate outperformance over fixed compositions; these results are empirical and not equivalent to any internal fitted parameters or self-defined quantities by construction. No self-citations are load-bearing, no uniqueness theorems are imported from the authors' prior work, and no ansatz or renaming reduces the claimed latency/SLA gains to inputs. The derivation remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- load thresholds for strategy selection
axioms (1)
- domain assumption Queuing theory provides a valid model for drone swarm latency and stability under dynamic loads
invented entities (1)
-
Atomic and composite SNaaS services
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We use an M/G/1 priority queueing framework... select the composition c* = arg min LSLA(c) s.t. ρj < 1
-
IndisputableMonolith/Foundation/DimensionForcing.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
three composition strategies, i.e., direct, clustered, and parallel
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Cognitive cities: A journey to intelligent urbanism,
H. Galal, R. Chowdhary, K. Vessali, V . Paul, G. Jaisinghania, and M. Kabbara, “Cognitive cities: A journey to intelligent urbanism,” 2023
2023
-
[2]
What should 6g be?
S. Dang, O. Amin, B. Shihada, and M.-S. Alouini, “What should 6g be?”Nature Electronics, vol. 3, no. 1, pp. 20–29, 2020
2020
-
[3]
Big communi- cations: Connect the unconnected,
C. Zhang, S. Dang, M.-S. Alouini, and B. Shihada, “Big communi- cations: Connect the unconnected,”Frontiers in Communications and Networks, vol. 3, p. 785933, 2022
2022
-
[4]
Performance of cellular networks on the wheels,
M. Ghoshal, I. Khan, Z. J. Kong, P. Dinh, J. Meng, Y . C. Hu, and D. Koutsonikolas, “Performance of cellular networks on the wheels,” inProceedings of the 2023 ACM on Internet Measurement Conference, 2023, pp. 678–695
2023
-
[5]
Satellite communi- cations in the new space era: A survey and future challenges,
O. Kodheli, E. Lagunas, N. Maturo, S. K. Sharma, B. Shankar, J. F. M. Montoya, J. C. M. Duncan, D. Spano, S. Chatzinotas, S. Kisseleff, J. Querol, L. Lei, T. X. Vu, and G. Goussetis, “Satellite communi- cations in the new space era: A survey and future challenges,”IEEE Communications Surveys & Tutorials, vol. 23, no. 1, pp. 70–109, 2021
2021
-
[6]
Throughput maximization of uav networks,
W. Xu, Y . Sun, R. Zou, W. Liang, Q. Xia, F. Shan, T. Wang, X. Jia, and Z. Li, “Throughput maximization of uav networks,”IEEE/ACM Transactions on Networking, vol. 30, no. 2, pp. 881–895, 2021
2021
-
[7]
An in-depth survey on vir- tualization technologies in 6g integrated terrestrial and non-terrestrial networks,
S. Ammar, C. P. Lau, and B. Shihada, “An in-depth survey on vir- tualization technologies in 6g integrated terrestrial and non-terrestrial networks,”IEEE Open Journal of the Communications Society, vol. 5, pp. 3690–3734, 2024
2024
-
[8]
On the outage performance of space-air-ground integrated networks in the 3d poisson field,
J. Zhou, S. Dang, B. Shihada, and M.-S. Alouini, “On the outage performance of space-air-ground integrated networks in the 3d poisson field,”IEEE Transactions on Vehicular Technology, vol. 73, no. 3, pp. 4401–4406, 2023
2023
-
[9]
Communication and control in collaborative uavs: Recent advances and future trends,
S. Javaid, N. Saeed, Z. Qadir, H. Fahim, B. He, H. Song, and M. Bilal, “Communication and control in collaborative uavs: Recent advances and future trends,”IEEE Transactions on Intelligent Transportation Systems, vol. 24, no. 6, pp. 5719–5739, 2023
2023
-
[10]
Density-based pruning of drone swarm services,
B. Alkouz, A. Bouguettaya, and A. Lakhdari, “Density-based pruning of drone swarm services,” in2022 IEEE International Conference on Web Services (ICWS). IEEE, 2022, pp. 302–311
2022
-
[11]
Failure-sentient composition for swarm-based drone services,
——, “Failure-sentient composition for swarm-based drone services,” in 2023 IEEE International Conference on Web Services (ICWS). IEEE, 2023, pp. 493–503
2023
-
[12]
A tutorial on uavs for wireless networks: Applications, challenges, and open problems,
M. Mozaffari, W. Saad, M. Bennis, Y .-H. Nam, and M. Debbah, “A tutorial on uavs for wireless networks: Applications, challenges, and open problems,”IEEE communications surveys & tutorials, vol. 21, no. 3, pp. 2334–2360, 2019
2019
-
[13]
Beyond 5g with uavs: Foundations of a 3d wireless cellular network,
M. Mozaffari, A. T. Z. Kasgari, W. Saad, M. Bennis, and M. Debbah, “Beyond 5g with uavs: Foundations of a 3d wireless cellular network,” IEEE Transactions on Wireless Communications, vol. 18, no. 1, pp. 357– 372, 2018
2018
-
[14]
Latency aware drone base station placement in heterogeneous networks,
X. Sun and N. Ansari, “Latency aware drone base station placement in heterogeneous networks,” inGLOBECOM 2017-2017 IEEE Global Communications Conference. IEEE, 2017, pp. 1–6
2017
-
[15]
Energy-efficient cellular- connected uav swarm control optimization,
Y . Su, H. Zhou, Y . Deng, and M. Dohler, “Energy-efficient cellular- connected uav swarm control optimization,”IEEE Transactions on Wireless Communications, vol. 23, no. 5, pp. 4127–4140, 2023
2023
-
[16]
Energy-efficient trajectory optimization for uav-assisted iot networks,
L. Zhang, A. Celik, S. Dang, and B. Shihada, “Energy-efficient trajectory optimization for uav-assisted iot networks,”IEEE Transactions on Mobile Computing, vol. 21, no. 12, pp. 4323–4337, 2021
2021
-
[17]
The optimal and the greedy: Drone association and posi- tioning schemes for internet of uavs,
H. El Hammouti, D. Hamza, B. Shihada, M.-S. Alouini, and J. S. Shamma, “The optimal and the greedy: Drone association and posi- tioning schemes for internet of uavs,”IEEE Internet of Things Journal, vol. 8, no. 18, pp. 14 066–14 079, 2021
2021
-
[18]
Learn- as-you-fly: A distributed algorithm for joint 3d placement and user association in multi-uavs networks,
H. El Hammouti, M. Benjillali, B. Shihada, and M.-S. Alouini, “Learn- as-you-fly: A distributed algorithm for joint 3d placement and user association in multi-uavs networks,”IEEE Transactions on Wireless Communications, vol. 18, no. 12, pp. 5831–5844, 2019
2019
-
[19]
Hierarchical network slic- ing for uav-assisted wireless networks with deployment optimization,
F. Wei, G. Feng, S. Qin, Y . Peng, and Y . Liu, “Hierarchical network slic- ing for uav-assisted wireless networks with deployment optimization,” IEEE Journal on Selected Areas in Communications, 2024
2024
-
[20]
Resource management from single-domain 5g to end-to-end 6g network slicing: A survey,
S. Ebrahimi, F. Bouali, and O. C. Haas, “Resource management from single-domain 5g to end-to-end 6g network slicing: A survey,”IEEE Communications Surveys & Tutorials, vol. 26, no. 4, pp. 2836–2866, 2024
2024
-
[21]
Maritime-oriented network slicing in o-ran integrated aerial-terrestrial networks,
S. Ammar, W. Abderrahim, and B. Shihada, “Maritime-oriented network slicing in o-ran integrated aerial-terrestrial networks,”IEEE Transactions on Mobile Computing, 2025
2025
-
[22]
Drone-as-a-service: Research challenges and directions,
A. Hamdi, B. Alkouz, B. Shahzaad, A. Bouguettaya, A. G. Neiat, F. Salim, and D. Y . Kim, “Drone-as-a-service: Research challenges and directions,”Proceedings of the IEEE, 2025
2025
-
[23]
Service-based drone delivery,
B. Alkouz, B. Shahzaad, and A. Bouguettaya, “Service-based drone delivery,” in2021 IEEE 7th International Conference on Collaboration and Internet Computing (CIC). IEEE, 2021, pp. 68–76
2021
-
[24]
Package delivery using autonomous drones in skyways,
W. Lee, B. Alkouz, B. Shahzaad, and A. Bouguettaya, “Package delivery using autonomous drones in skyways,” inAdjunct Proceedings of the 2021 ACM International Joint Conference on Pervasive and Ubiquitous Computing and Proceedings of the 2021 ACM International Symposium on Wearable Computers, 2021, pp. 48–50
2021
-
[25]
Reactive composition of uav delivery services in urban environments,
W. Lee, B. Shahzaad, B. Alkouz, and A. Bouguettaya, “Reactive composition of uav delivery services in urban environments,”IEEE Transactions on Intelligent Transportation Systems, vol. 25, no. 10, pp. 13 453–13 466, 2024
2024
-
[26]
Signal-based approach for reliable drone swarm delivery,
B. Alkouz, A. Bouguettaya, A. Lakhdari, and S. Yangui, “Signal-based approach for reliable drone swarm delivery,” in2024 IEEE International Conference on Web Services (ICWS). IEEE, 2024, pp. 1238–1244
2024
-
[27]
State-of-the-art and future research challenges in uav swarms,
S. Javed, A. Hassan, R. Ahmad, W. Ahmed, R. Ahmed, A. Saadat, and M. Guizani, “State-of-the-art and future research challenges in uav swarms,”IEEE Internet of Things Journal, vol. 11, no. 11, pp. 19 023– 19 045, 2024
2024
-
[28]
Computational intelligence algorithms for uav swarm networking and collaboration: A comprehensive survey and future directions,
P. Cao, L. Lei, S. Cai, G. Shen, X. Liu, X. Wang, L. Zhang, L. Zhou, and M. Guizani, “Computational intelligence algorithms for uav swarm networking and collaboration: A comprehensive survey and future directions,”IEEE Communications Surveys & Tutorials, vol. 26, no. 4, pp. 2684–2728, 2024
2024
-
[29]
Formation-based selection of drone swarm services,
B. Alkouz and A. Bouguettaya, “Formation-based selection of drone swarm services,” inMobiQuitous 2020-17th EAI International Confer- ence on Mobile and Ubiquitous Systems: Computing, Networking and Services, 2020, pp. 386–394
2020
-
[30]
Distributed reinforcement learning for flexible and efficient uav swarm control,
F. Venturini, F. Mason, F. Pase, F. Chiariotti, A. Testolin, A. Zanella, and M. Zorzi, “Distributed reinforcement learning for flexible and efficient uav swarm control,”IEEE Transactions on Cognitive Communications and Networking, vol. 7, no. 3, pp. 955–969, 2021
2021
-
[31]
Swarm-based drone-as-a- service (sdaas) for delivery,
B. Alkouz, A. Bouguettaya, and S. Mistry, “Swarm-based drone-as-a- service (sdaas) for delivery,” in2020 IEEE International Conference on Web Services (ICWS). IEEE, 2020, pp. 441–448
2020
-
[32]
Towards enabling unmanned aerial vehicles as a service for heterogeneous applications,
F. Nait-Abdesselam, A. Alsharoa, M. Y . Selim, D. Qiao, and A. E. Kamal, “Towards enabling unmanned aerial vehicles as a service for heterogeneous applications,”Journal of Communications and Networks, vol. 23, no. 3, pp. 212–221, 2021
2021
-
[33]
A service- based architecture for enabling uav enhanced network services,
O. Bekkouche, K. Samdanis, M. Bagaa, and T. Taleb, “A service- based architecture for enabling uav enhanced network services,”IEEE Network, vol. 34, no. 4, pp. 328–335, 2020
2020
-
[34]
A software- defined uav network using queueing model,
M. A. B. S. Abir, M. Z. Chowdhury, and Y . M. Jang, “A software- defined uav network using queueing model,”IEEE Access, vol. 11, pp. 91 423–91 440, 2023
2023
-
[35]
A service computing manifesto: the next 10 years,
A. Bouguettaya, M. Singh, M. Huhns, Q. Z. Sheng, H. Dong, Q. Yu, A. G. Neiat, S. Mistry, B. Benatallah, B. Medjahedet al., “A service computing manifesto: the next 10 years,”Communications of the ACM, vol. 60, no. 4, pp. 64–72, 2017
2017
-
[36]
A selfish approach to coalition formation among unmanned air vehicles in wireless networks,
W. Saad, Z. Han, T. Basar, M. Debbah, and A. Hjorungnes, “A selfish approach to coalition formation among unmanned air vehicles in wireless networks,” in2009 International Conference on Game Theory for Networks. IEEE, 2009, pp. 259–267
2009
-
[37]
Reference model for service oriented architecture 1.0,
C. M. MacKenzie, K. Laskey, F. McCabe, P. F. Brown, R. Metz, and B. A. Hamilton, “Reference model for service oriented architecture 1.0,” OASIS standard, vol. 12, no. S18, pp. 1–31, 2006
2006
-
[38]
Software-defined networking: A comprehensive survey,
D. Kreutz, F. M. Ramos, P. E. Verissimo, C. E. Rothenberg, S. Azodol- molky, and S. Uhlig, “Software-defined networking: A comprehensive survey,”Proceedings of the IEEE, vol. 103, no. 1, pp. 14–76, 2014
2014
-
[39]
Gross,Fundamentals of queueing theory
D. Gross,Fundamentals of queueing theory. John wiley & sons, 2008
2008
-
[40]
C. Dickerson, A. H. Fahim Raouf, O. Ozdemiret al., “Aerpaw uav-based signal data collected at varying altitudes and sampling rates for wireless communication studies,” 2025, dataset. [Online]. Available: https://doi.org/10.5061/dryad.2z34tmpvv
-
[41]
Goldsmith,Wireless communications
A. Goldsmith,Wireless communications. Cambridge university press, 2005
2005
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.