Recognition: unknown
Asymptotically Optimal Ergodic Coverage on Generalized Motion Fields
Pith reviewed 2026-05-14 19:07 UTC · model grok-4.3
The pith
A flow-adaptive MMD formulation preserves ergodic coverage guarantees in time-varying domains and supports under-actuated open-loop robot planning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
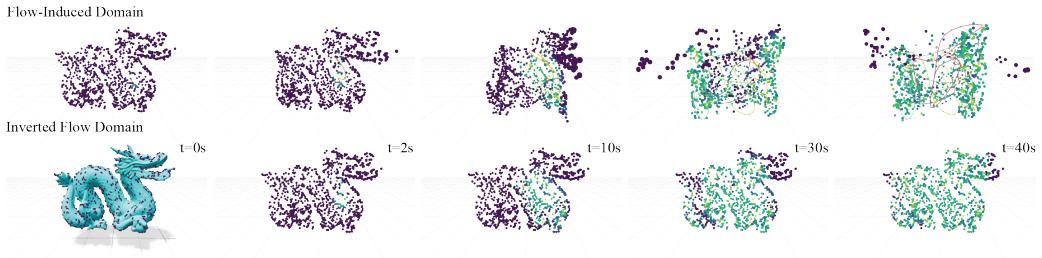
By expanding the MMD-based ergodic metric to account for flow-induced domain evolution, the method preserves ergodic coverage guarantees in ambient flows and enables effective exploration in under-actuated and open-loop planning settings through integration of environment dynamics.
What carries the argument
The flow-adaptive MMD objective, which modifies the standard ergodic metric to integrate known flow fields and domain changes, allowing optimization of coverage paths that respect environmental dynamics.
If this is right
- Preserves ergodic coverage guarantees in ambient flows.
- Enables effective exploration in under-actuated and open-loop planning settings.
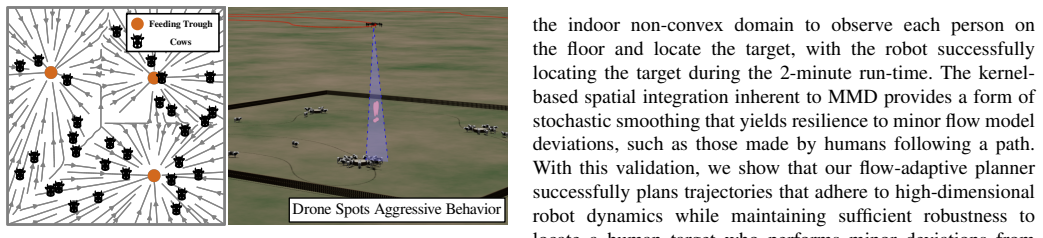
- Generalizes to diverse spatiotemporal processes including ocean exploration and tracking of human and cattle movement.
- Achieves validated ergodic coverage on physical aerial and legged robots in non-convex flow-restricted environments.
Where Pith is reading between the lines
- May allow reliable planning from predicted flows alone without continuous onboard sensing.
- Could apply to other flow-dominated domains such as atmospheric transport or biological collectives.
- Reduces dependence on high-frequency feedback loops in compute-limited robotic systems.
Load-bearing premise
That the flow fields and domain evolution are known or accurately modeled in advance so the adaptive MMD objective can be computed and optimized without feedback.
What would settle it
A controlled simulation or experiment in a known flow field where the robot executes the planned trajectory but the measured ergodic coverage metric falls well below the value predicted by the flow-adaptive objective.
Figures






read the original abstract
Autonomous robotic exploration in remote and extreme environments allows scientists to model complex transport phenomena and collective behaviors described by continuously deforming flow fields. Although these environments are naturally modeled as time-varying domains, most adaptive exploration methods assume static environments and fail to provide adequate coverage or satisfy any formal guarantees. This is especially the case in oceanography where autonomous underwater systems (UxS) have highly restrictive compute and payload requirements that necessitate path planning methods that yield robust data collection strategies in open-loop and underactuated settings. In this work, to address the aforementioned issues, we propose to formulate adaptive search as an ergodic coverage problem and investigate certifying coverage in the ergodic sense over evolving domains with flow-induced dynamics. We expand upon recent work demonstrating maximum mean discrepancy (MMD) as a functional ergodic metric, and derive a flow-adaptive formulation that explicitly accounts for domain evolution within the coverage objective. We show that this approach preserves ergodic coverage guarantees in ambient flows and enables effective exploration in under-actuated, and even open-loop planning settings by integrating environment dynamics. Experiments validate that our method generalizes to diverse spatiotemporal processes including ocean exploration, and tracking human and cattle movement. Physical experiments on aerial and legged robotic platforms validate our ability to obtain ergodic coverage in non-convex, flow-restricted environments while respecting robot dynamics.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper formulates adaptive robotic exploration as an ergodic coverage problem on time-varying domains induced by ambient flow fields. It extends prior MMD-based ergodic metrics to a flow-adaptive objective that explicitly incorporates domain evolution, claims that this preserves asymptotic optimality guarantees, and demonstrates utility for under-actuated and open-loop planning. Validation includes simulations on ocean, human, and cattle movement processes plus physical experiments on aerial and legged platforms in non-convex, flow-restricted settings.
Significance. If the central derivation holds, the work provides a principled extension of ergodic coverage to dynamic environments, which is relevant for oceanographic and environmental robotics where static-domain assumptions fail. The integration of known flow dynamics into the coverage objective could reduce reliance on closed-loop feedback, aligning with payload constraints of UxS platforms. The physical experiments offer concrete evidence of feasibility beyond simulation.
major comments (2)
- [Abstract and §3] Abstract and §3 (flow-adaptive MMD derivation): the preservation of ergodic guarantees is stated to follow from folding the known flow field and domain evolution directly into the MMD objective, yet no sensitivity bounds or robustness analysis under flow-model mismatch (estimation error, turbulence, or prediction drift) are provided; this assumption is load-bearing for both the asymptotic-optimality claim and the open-loop planning result.
- [§4] §4 (Experiments): the reported scenarios appear selected post-hoc to match the exact-knowledge assumption; it is unclear whether performance degrades under realistic flow uncertainty levels that would break the correspondence between the computed objective and the true evolving ergodic measure.
minor comments (2)
- [§2] Notation for the time-varying domain and flow-induced velocity field should be introduced with a single consistent symbol set early in §2 to avoid later ambiguity when the adaptive MMD is defined.
- [Figures in §4] Figure captions for the physical robot trajectories should explicitly state the flow field model used and whether it was assumed known or estimated.
Simulated Author's Rebuttal
We are grateful to the referee for the constructive and detailed review. We address each major comment below, clarifying the scope of our assumptions regarding known flow fields and outlining targeted revisions to improve clarity and context without altering the core technical contributions.
read point-by-point responses
-
Referee: [Abstract and §3] Abstract and §3 (flow-adaptive MMD derivation): the preservation of ergodic guarantees is stated to follow from folding the known flow field and domain evolution directly into the MMD objective, yet no sensitivity bounds or robustness analysis under flow-model mismatch (estimation error, turbulence, or prediction drift) are provided; this assumption is load-bearing for both the asymptotic-optimality claim and the open-loop planning result.
Authors: We thank the referee for highlighting this important point. Our derivation and asymptotic optimality guarantees are established under the explicit assumption of perfectly known flow fields and domain evolution, as stated in the problem formulation (§2) and the flow-adaptive MMD objective (§3). This matches standard assumptions in open-loop planning where environmental models (e.g., ocean forecasts) are provided externally. We agree that no sensitivity bounds or robustness analysis under mismatch is included. In the revised manuscript we will add a dedicated paragraph in §3 that (i) reiterates the exact-knowledge assumption, (ii) provides a qualitative discussion of how model errors could perturb the ergodic measure, and (iii) explicitly flags quantitative robustness analysis as future work. This revision contextualizes the claims without changing the stated guarantees. revision: partial
-
Referee: [§4] §4 (Experiments): the reported scenarios appear selected post-hoc to match the exact-knowledge assumption; it is unclear whether performance degrades under realistic flow uncertainty levels that would break the correspondence between the computed objective and the true evolving ergodic measure.
Authors: The experimental scenarios were chosen to illustrate the method on representative spatiotemporal processes (ocean currents, human and cattle motion) for which flow or motion models are commonly available, consistent with the problem setting. We acknowledge that all reported results assume exact knowledge. In the revised §4 we will add a new paragraph that (i) explicitly states this assumption for the experiments, (ii) discusses qualitatively the expected degradation under flow uncertainty, and (iii) includes one additional simulation that injects realistic noise into the flow field to illustrate performance sensitivity. This addition will directly address the concern while remaining within the scope of the current contribution. revision: partial
Circularity Check
Derivation expands external MMD ergodic metric into flow-adaptive objective without self-referential reduction.
full rationale
The paper cites recent external work establishing MMD as a functional ergodic metric, then derives a flow-adaptive formulation that accounts for domain evolution. No equations or steps in the abstract or reader's summary reduce a prediction or guarantee to a quantity fitted from the authors' own prior definitions. The central claim of preserved ergodic coverage therefore rests on the external MMD foundation plus the new integration step, rather than on self-definition, fitted-input renaming, or load-bearing self-citation chains. This yields only minor self-citation risk at most.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Mur- phey
Ian Abraham, Ahalya Prabhakar, and Todd D. Mur- phey. Active area coverage from equilibrium. In Marco Morales, Lydia Tapia, Gildardo S ´anchez-Ante, and Seth Hutchinson, editors,Algorithmic Foundations of Robotics XIII, pages 284–300, Cham, 2020. Springer International Publishing. ISBN 978-3-030-44051-0
2020
-
[2]
Francesco Amigoni and Vincenzo Caglioti. An information-based exploration strategy for environ- ment mapping with mobile robots.Robotics and Autonomous Systems, 58(5):684–699, 2010. ISSN 0921-8890. doi: https://doi.org/10.1016/j.robot.2009.11
-
[3]
URL https://www.sciencedirect.com/science/article/ pii/S0921889009002024
-
[4]
Information based adaptive robotic exploration
Fr ´ed´eric Bourgault, Alexei Makarenko, Stefan Williams, Ben Grocholsky, and Hugh Durrant-Whyte. Information based adaptive robotic exploration. volume 1, pages 540 – 545 vol.1, 02 2002. ISBN 0-7803-7398-7. doi: 10. 1109/IRDS.2002.1041446
-
[5]
Rik B ¨ahnemann, Nicholas Lawrance, Jen Jen Chung, Michael Pantic, Roland Siegwart, and Juan Nieto.Re- visiting Boustrophedon Coverage Path Planning as a Generalized Traveling Salesman Problem, page 277–290. Springer Singapore, 2021. ISBN 9789811594601. doi: 10.1007/978-981-15-9460-1 20. URL http://dx.doi.org/ 10.1007/978-981-15-9460-1 20
-
[6]
Caley and Geoffrey A
Jeffrey A. Caley and Geoffrey A. Hollinger. Environment prediction from sparse samples for robotic information gathering. In2020 IEEE International Conference on Robotics and Automation (ICRA), pages 10577–10583,
-
[7]
doi: 10.1109/ICRA40945.2020.9197263
-
[8]
R. Courant, K. Friedrichs, and H. Lewy. On the partial difference equations of mathematical physics.IBM J. Res. Dev., 11(2):215–234, March 1967. ISSN 0018-8646. doi: 10.1147/rd.112.0215. URL https://doi.org/10.1147/ rd.112.0215
-
[9]
E.L. Creed, J. Kerfoot, C. Mudgal, and H. Barrier. Transi- tion of slocum electric gliders to a sustained operational system. InOceans ’04 MTS/IEEE Techno-Ocean ’04 (IEEE Cat. No.04CH37600), volume 2, pages 828–833 V ol.2, 2004. doi: 10.1109/OCEANS.2004.1405565
-
[10]
Borgwardt, Malte J
Arthur Gretton, Karsten M. Borgwardt, Malte J. Rasch, Bernhard Sch ¨olkopf, and Alexander Smola. A kernel two-sample test.Journal of Machine Learning Research, 13(25):723–773, 2012. URL http://jmlr.org/papers/v13/ gretton12a.html
2012
-
[11]
G. Haller. Distinguished material surfaces and coherent structures in three-dimensional fluid flows.Physica D: Nonlinear Phenomena, 149(4):248–277, 2001. ISSN 0167-2789. doi: https://doi.org/10.1016/S0167-2789(00) 00199-8. URL https://www.sciencedirect.com/science/ article/pii/S0167278900001998
-
[12]
G. Haller. Lagrangian coherent structures from approxi- mate velocity data.Physics of Fluids, 14(6):1851–1861, 06 2002. ISSN 1070-6631. doi: 10.1063/1.1477449. URL https://doi.org/10.1063/1.1477449
-
[13]
Lagrangian coherent structures
George Haller. Lagrangian coherent structures. Annual Review of Fluid Mechanics, 47(V olume 47, 2015):137–162, 2015. ISSN 1545-4479. doi: https://doi.org/10.1146/annurev-fluid-010313-141322. URL https://www.annualreviews.org/content/journals/10. 1146/annurev-fluid-010313-141322
-
[14]
Imran Hayat, Ryan T. Black, and George Ilhwan Park. Reference map technique for lagrangian exploration of coherent structures.Journal of Fluid Mechanics, 1000, December 2024. ISSN 1469-7645. doi: 10.1017/ jfm.2024.1037. URL http://dx.doi.org/10.1017/jfm.2024. 1037
-
[15]
Hollinger and Gaurav S
Geoffrey A. Hollinger and Gaurav S. Sukhatme. Sampling-based robotic information gathering algo- rithms.The International Journal of Robotics Research, 33(9):1271–1287, 2014. doi: 10.1177/ 0278364914533443. URL https://doi.org/10.1177/ 0278364914533443
2014
-
[16]
Ergodic trajectory optimiza- tion on generalized domains using maximum mean dis- crepancy, 2024
Christian Hughes, Houston Warren, Darrick Lee, Fabio Ramos, and Ian Abraham. Ergodic trajectory optimiza- tion on generalized domains using maximum mean dis- crepancy, 2024. URL https://arxiv.org/abs/2410.10599
-
[17]
Multi-uav trajectory planning for 3d vi- sual inspection of complex structures.Automation in Construction, 147:104709, March 2023
Stefan Ivi ´c, Bojan Crnkovi ´c, Luka Grb ˇci´c, and Lea Matlekovi´c. Multi-uav trajectory planning for 3d vi- sual inspection of complex structures.Automation in Construction, 147:104709, March 2023. ISSN 0926-
2023
-
[18]
URL http: //dx.doi.org/10.1016/j.autcon.2022.104709
doi: 10.1016/j.autcon.2022.104709. URL http: //dx.doi.org/10.1016/j.autcon.2022.104709
-
[19]
Simulation tools for model- based robotics: Comparison of bullet, havok, mujoco, ode and physx,
Maani Ghaffari Jadidi, Jaime Valls Mir ´o, Rafael Valen- cia, and Juan Andrade-Cetto. Exploration on contin- uous gaussian process frontier maps. In2014 IEEE International Conference on Robotics and Automation (ICRA), pages 6077–6082, 2014. doi: 10.1109/ICRA. 2014.6907754
-
[20]
IEEE Transactions on Robotics and Automation , volume = 12, number = 4, pages =
L.E. Kavraki, P. Svestka, J.-C. Latombe, and M.H. Over- mars. Probabilistic roadmaps for path planning in high- dimensional configuration spaces.IEEE Transactions on Robotics and Automation, 12(4):566–580, 1996. doi: 10.1109/70.508439
-
[21]
Lermusiaux, and Claire J
Matthias Killer, Marius Wiggert, Hanna Krasowski, Manan Doshi, Pierre F.J. Lermusiaux, and Claire J. Tom- lin. Maximizing seaweed growth on autonomous farms: A dynamic programming approach for underpowered systems operating in uncertain ocean currents.IEEE Robotics and Automation Letters, 10(10):10745–10752,
-
[22]
doi: 10.1109/LRA.2025.3604727
-
[23]
Dhanushka Kularatne and M. Hsieh. Tracking attracting manifolds in flows.Autonomous Robots, 41, 12 2017. doi: 10.1007/s10514-017-9628-y
-
[24]
Search at scale: Improving numerical conditioning of ergodic coverage optimization for multi-scale domains,
Yanis Lahrach, Christian Hughes, and Ian Abraham. Search at scale: Improving numerical conditioning of ergodic coverage optimization for multi-scale domains,
- [25]
-
[26]
Stein variational ergodic search, 2024
Darrick Lee, Cameron Lerch, Fabio Ramos, and Ian Abraham. Stein variational ergodic search, 2024. URL https://arxiv.org/abs/2406.11767
-
[27]
Computa- tion of lagrangian coherent structures from experimental fluid trajectory measurements in a mechanically agitated vessel.Chemical Engineering Science, 254:117598,
Kun Li, Chiya Savari, and Mostafa Barigou. Computa- tion of lagrangian coherent structures from experimental fluid trajectory measurements in a mechanically agitated vessel.Chemical Engineering Science, 254:117598,
-
[28]
ISSN 0009-2509. doi: https://doi.org/10.1016/j. ces.2022.117598. URL https://www.sciencedirect.com/ science/article/pii/S0009250922001828
work page doi:10.1016/j 2022
-
[29]
Bayesian opti- misation for informative continuous path planning
Roman Marchant and Fabio Ramos. Bayesian opti- misation for informative continuous path planning. In 2014 IEEE International Conference on Robotics and Automation (ICRA), pages 6136–6143, 2014. doi: 10. 1109/ICRA.2014.6907763
-
[30]
Se- quential bayesian optimisation for spatial-temporal mon- itoring
Roman Marchant, Fabio Ramos, and Scott Sanner. Se- quential bayesian optimisation for spatial-temporal mon- itoring. InProceedings of the Thirtieth Conference on Uncertainty in Artificial Intelligence, UAI’14, page 553–562, Arlington, Virginia, USA, 2014. AUAI Press. ISBN 9780974903910
2014
-
[31]
Metrics for ergodicity and design of ergodic dynamics for multi-agent systems
George Mathew and Igor Mezic. Metrics for ergodicity and design of ergodic dynamics for multi-agent systems. Physica D: Nonlinear Phenomena, 240, 02 2011. doi: 10.1016/j.physd.2010.10.010
-
[32]
Mavrommati, Emmanouil Tzorakoleftherakis, I
A. Mavrommati, Emmanouil Tzorakoleftherakis, I. Abra- ham, and T. D. Murphey. Real-time area coverage and target localization using receding-horizon ergodic exploration.IEEE Transactions on Robotics, 34(1):62– 80, Feb. 2018. doi: 10.1109/TRO.2017.2757959
-
[33]
Automated self-assembly of large maritime structures by a team of robotic boats.IEEE Transactions on Automation Science and Engineering, 12(3):958–968,
James Paulos, Nick Eckenstein, Tarik Tosun, Jungwon Seo, Jay Davey, Jonathan Greco, Vijay Kumar, and Mark Yim. Automated self-assembly of large maritime structures by a team of robotic boats.IEEE Transactions on Automation Science and Engineering, 12(3):958–968,
-
[34]
doi: 10.1109/TASE.2015.2416678
-
[35]
PENG and J
J. PENG and J. O. DABIRI. Transport of inertial particles by lagrangian coherent structures: application to predator–prey interaction in jellyfish feeding.Journal of Fluid Mechanics, 623:75–84, 2009. doi: 10.1017/ S0022112008005089
2009
-
[36]
and Ayanian, Nora and Sukhatme, Gaurav S
Brent Schlotfeldt, Nikolay Atanasov, and George J. Pap- pas. Maximum information bounds for planning active sensing trajectories. In2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 4913–4920, 2019. doi: 10.1109/IROS40897.2019. 8968147
-
[37]
Slocum gliders: Robust and ready.Journal of Field Robotics, 24(6):473–485, 2007
Oscar Schofield, Josh Kohut, David Aragon, Liz Creed, Josh Graver, Chip Haldeman, John Kerfoot, Hugh Roarty, Clayton Jones, Doug Webb, and Scott Glenn. Slocum gliders: Robust and ready.Journal of Field Robotics, 24(6):473–485, 2007. doi: https://doi.org/10.1002/rob. 20200. URL https://onlinelibrary.wiley.com/doi/abs/10. 1002/rob.20200
work page doi:10.1002/rob 2007
-
[38]
Sherry E. Scott, Thomas C. Redd, Leonid Kuznetsov, Igor Mezi ´c, and Christopher K.R.T. Jones. Capturing deviation from ergodicity at different scales.Physica D: Nonlinear Phenomena, 238(16):1668–1679, 2009. ISSN 0167-2789. doi: https://doi.org/10.1016/j.physd.2009.05
-
[39]
URL https://www.sciencedirect.com/science/article/ pii/S0167278909001523
-
[40]
Carmine Senatore and Shane D. Ross. Fuel-efficient navigation in complex flows. In2008 American Control Conference, pages 1244–1248, 2008. doi: 10.1109/ACC. 2008.4586663
work page doi:10.1109/acc 2008
-
[41]
Short and Kathleen C
Cody R. Short and Kathleen C. Howell. La- grangian coherent structures in various map representa- tions for application to multi-body gravitational regimes. Acta Astronautica, 94(2):592–607, 2014. ISSN 0094-
2014
-
[42]
doi: https://doi.org/10.1016/j.actaastro.2013.08
-
[43]
URL https://www.sciencedirect.com/science/article/ pii/S0094576513003408
-
[44]
Sriperumbudur, Kenji Fukumizu, and Gert R
Bharath K. Sriperumbudur, Kenji Fukumizu, and Gert R. G. Lanckriet. Universality, Characteristic Kernels and RKHS Embedding of Measures. 12(70):2389–2410. ISSN 1533-7928
-
[45]
Deepak N. Subramani, Patrick J. Haley Jr., and Pierre F. J. Lermusiaux. Energy-optimal path planning in the coastal ocean.Journal of Geophysical Research: Oceans, 122(5):3981–4003, 2017. doi: https://doi.org/10.1002/ 2016JC012231. URL https://agupubs.onlinelibrary.wiley. com/doi/abs/10.1002/2016JC012231
-
[46]
Fast ergodic search with kernel functions
Muchen Sun, Ayush Gaggar, Peter Trautman, and Todd Murphey. Fast ergodic search with kernel functions. arXiv preprint arXiv:2403.01536, 2024
-
[47]
A survey of decision-theoretic ap- proaches for robotic environmental monitoring, 2023
Yoonchang Sung, Zhiang Chen, Jnaneshwar Das, and Pratap Tokekar. A survey of decision-theoretic ap- proaches for robotic environmental monitoring, 2023. URL https://arxiv.org/abs/2308.02698
-
[48]
A probabilistic approach for concurrent map acquisition and localization for mobile robots
Sebastian Thrun, Wolfram Burgard, and Dieter Fox. A probabilistic approach for concurrent map acquisition and localization for mobile robots. 12 1997
1997
-
[49]
Springer Science & Business Media, 2000
Peter Walters.An Introduction to Ergodic Theory. Springer Science & Business Media, 2000. ISBN 978- 0-387-95152-2
2000
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.