Recognition: unknown
Real2Sim: A Physics-driven and Editable Gaussian Splatting Framework for Autonomous Driving Scenes
Pith reviewed 2026-05-14 19:27 UTC · model grok-4.3
The pith
A framework fuses 4D Gaussian Splatting with a physics solver to reconstruct and edit dynamic driving scenes while preserving realistic interactions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
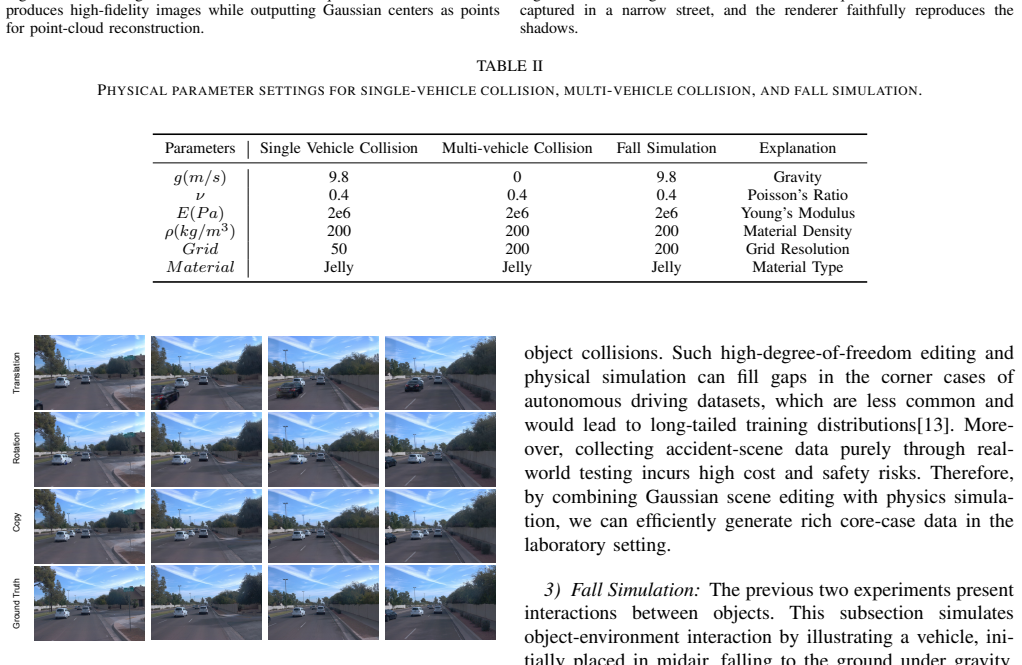
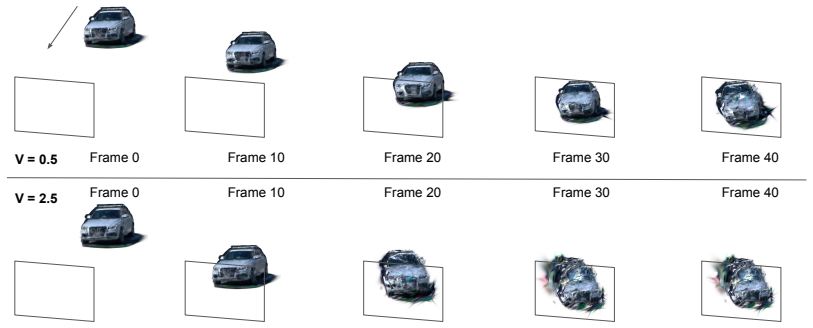
Real2Sim reconstructs dynamic driving scenes as temporally continuous Gaussian primitives using 4D Gaussian Splatting and couples this representation to a differentiable Material Point Method solver to simulate realistic object-object and object-environment interactions, thereby enabling instance-level editing and physics-aware synthesis of scenarios such as collisions and post-impact trajectories.
What carries the argument
4D Gaussian Splatting representation of scenes combined with a differentiable Material Point Method solver for physics simulation.
Load-bearing premise
The differentiable physics solver can be tightly integrated with the Gaussian point representation without creating visual artifacts or inaccurate motion in complex real driving scenes.
What would settle it
If post-edit collision trajectories or object movements in the simulated scenes deviate measurably from recorded real-world physics data on the same initial conditions, the central claim would be falsified.
Figures






read the original abstract
Reliable autonomous driving relies on large-scale, well-labeled data and robust models. However, manual data collection is resource-intensive, and traditional simulation suffers from a persistent reality gap. While recent generative frameworks and radiance-field methods improve visual fidelity, they still struggle with temporal and spatial consistency and cannot ensure physics-aware behavior, limiting their applicability to driving scenario generation. To address these challenges, we propose Real2Sim, an unified framework that combines 4D Gaussian Splatting (4DGS) with a differentiable Material Point Method (MPM) solver. Real2Sim explicitly reconstructs dynamic driving scenes as temporally continuous Gaussian primitives, supports instance-level editing, and simulates realistic object-object and object-environment interactions. This framework enables physics-aware, high-fidelity synthesis of diverse, editable scenarios, including challenging corner cases such as collisions and post-impact trajectories. Experiments on the Waymo Open Dataset validate Real2Sim's capabilities in rendering, reconstruction, editing, and physics simulation, demonstrating its potential as a scalable tool for data generation in downstream tasks such as perception, tracking, trajectory prediction, and end-to-end policy learning.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Real2Sim, a unified framework that reconstructs dynamic autonomous driving scenes from real data (e.g., Waymo Open Dataset) as temporally continuous 4D Gaussian primitives, supports instance-level editing, and couples these to a differentiable Material Point Method (MPM) solver to simulate realistic object-object and object-environment interactions, including collisions and post-impact trajectories, for physics-aware scenario synthesis.
Significance. If the 4DGS-MPM coupling can be shown to preserve both visual fidelity and physical accuracy without artifacts or loss of conservation properties, the work would offer a valuable bridge between high-fidelity radiance-field reconstruction and physics-based simulation, enabling scalable generation of editable corner-case data for downstream autonomous-driving tasks such as perception, tracking, and policy learning.
major comments (2)
- [Abstract] Abstract: validation on the Waymo Open Dataset is asserted for rendering, reconstruction, editing, and physics simulation, yet no quantitative metrics, ablation studies, error bounds, or baseline comparisons are supplied. This absence is load-bearing for the central claim that the framework produces high-fidelity, physically realistic outputs.
- [Methods] Methods (4DGS-MPM coupling): the projection or sampling step that maps continuous, time-varying anisotropic Gaussians onto the MPM background grid and particles is not shown to preserve gradient flow for optimization while simultaneously enforcing conservation laws. In multi-object Waymo scenes containing rigid vehicles, deformable pedestrians, and ground contacts, any discretization mismatch risks violating the guarantee of realistic post-impact trajectories.
minor comments (1)
- [Abstract] Abstract: the phrase 'temporally continuous Gaussian primitives' is used without a brief definition or reference to the underlying 4DGS parameterization.
Simulated Author's Rebuttal
We sincerely thank the referee for their thorough review and constructive feedback. We address each major comment point by point below, clarifying details from the full manuscript and outlining planned revisions to strengthen the presentation.
read point-by-point responses
-
Referee: [Abstract] Abstract: validation on the Waymo Open Dataset is asserted for rendering, reconstruction, editing, and physics simulation, yet no quantitative metrics, ablation studies, error bounds, or baseline comparisons are supplied. This absence is load-bearing for the central claim that the framework produces high-fidelity, physically realistic outputs.
Authors: We agree that the abstract would be strengthened by explicitly referencing key quantitative results. The full manuscript (Section 4) reports PSNR/SSIM for rendering, Chamfer distance and IoU for reconstruction/editing, and physics metrics including trajectory L2 error, momentum conservation error, and collision accuracy, with comparisons to baselines such as vanilla 4DGS and non-differentiable simulators. We will revise the abstract to include these highlights (e.g., average PSNR of X dB and trajectory error of Y cm) while keeping it concise. revision: yes
-
Referee: [Methods] Methods (4DGS-MPM coupling): the projection or sampling step that maps continuous, time-varying anisotropic Gaussians onto the MPM background grid and particles is not shown to preserve gradient flow for optimization while simultaneously enforcing conservation laws. In multi-object Waymo scenes containing rigid vehicles, deformable pedestrians, and ground contacts, any discretization mismatch risks violating the guarantee of realistic post-impact trajectories.
Authors: We appreciate this technical concern. Section 3.3 describes the differentiable projection operator from time-varying anisotropic Gaussians to MPM particles via kernel-based sampling, which is formulated to maintain end-to-end gradient flow for joint optimization. The MPM solver enforces conservation of mass and momentum by construction through its grid-to-particle transfers. To address potential discretization issues in multi-object scenes, we will add a supplementary derivation proving gradient preservation, include an ablation on grid resolution effects, and provide additional qualitative results on post-impact trajectories for rigid/deformable interactions. revision: partial
Circularity Check
No significant circularity detected; framework claims remain independent of input definitions
full rationale
The paper proposes Real2Sim as a combination of 4D Gaussian Splatting and a differentiable MPM solver for scene reconstruction, editing, and physics simulation, validated on the external Waymo Open Dataset. No equations, derivations, or self-citations are exhibited in the provided text that reduce the central claims (temporally continuous primitives, instance-level edits, realistic interactions) to fitted parameters or definitions by construction. The integration is presented as a novel coupling rather than a renaming or self-referential fit, and performance assertions rely on dataset experiments rather than tautological reductions. This qualifies as a self-contained proposal with no load-bearing circular steps.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Scalability in perception for autonomous driving: Waymo open dataset,
P. Sun, H. Kretzschmar, X. Dotiwalla, A. Chouard, V . Patnaik, P. Tsui, J. Guo, Y . Zhou, Y . Chai, B. Caineet al., “Scalability in perception for autonomous driving: Waymo open dataset,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2020, pp. 2446–2454
work page 2020
-
[2]
Surfelgan: Synthesizing realistic sensor data for autonomous driving,
Z. Yang, Y . Chai, D. Anguelov, Y . Zhou, P. Sun, D. Erhan, S. Rafferty, and H. Kretzschmar, “Surfelgan: Synthesizing realistic sensor data for autonomous driving,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020, pp. 11 118–11 127
work page 2020
-
[3]
GAIA-2: A Controllable Multi-View Generative World Model for Autonomous Driving
L. Russell, A. Hu, L. Bertoni, G. Fedoseev, J. Shotton, E. Arani, and G. Corrado, “Gaia-2: A controllable multi-view generative world model for autonomous driving,”arXiv preprint arXiv:2503.20523, 2025
work page internal anchor Pith review arXiv 2025
-
[4]
Nerf: Representing scenes as neural radiance fields for view synthesis,
B. Mildenhall, P. P. Srinivasan, M. Tancik, J. T. Barron, R. Ramamoor- thi, and R. Ng, “Nerf: Representing scenes as neural radiance fields for view synthesis,”Communications of the ACM, vol. 65, no. 1, pp. 99–106, 2021
work page 2021
-
[5]
3d gaussian splatting for real-time radiance field rendering
B. Kerbl, G. Kopanas, T. Leimk ¨uhler, and G. Drettakis, “3d gaussian splatting for real-time radiance field rendering.”ACM Trans. Graph., vol. 42, no. 4, pp. 139–1, 2023
work page 2023
-
[6]
4d gaussian splatting for real-time dynamic scene rendering,
G. Wu, T. Yi, J. Fang, L. Xie, X. Zhang, W. Wei, W. Liu, Q. Tian, and X. Wang, “4d gaussian splatting for real-time dynamic scene rendering,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2024, pp. 20 310–20 320
work page 2024
-
[7]
4d-rotor gaussian splatting: towards efficient novel view synthesis for dynamic scenes,
Y . Duan, F. Wei, Q. Dai, Y . He, W. Chen, and B. Chen, “4d-rotor gaussian splatting: towards efficient novel view synthesis for dynamic scenes,” inACM SIGGRAPH 2024 Conference Papers, 2024, pp. 1–11
work page 2024
-
[8]
Drivinggaussian: Composite gaussian splatting for surrounding dy- namic autonomous driving scenes,
X. Zhou, Z. Lin, X. Shan, Y . Wang, D. Sun, and M.-H. Yang, “Drivinggaussian: Composite gaussian splatting for surrounding dy- namic autonomous driving scenes,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2024, pp. 21 634–21 643
work page 2024
-
[9]
Street gaussians: Modeling dynamic urban scenes with gaussian splatting,
Y . Yan, H. Lin, C. Zhou, W. Wang, H. Sun, K. Zhan, X. Lang, X. Zhou, and S. Peng, “Street gaussians: Modeling dynamic urban scenes with gaussian splatting,” inEuropean Conference on Computer Vision. Springer, 2024, pp. 156–173
work page 2024
-
[10]
Phys- gaussian: Physics-integrated 3d gaussians for generative dynamics,
T. Xie, Z. Zong, Y . Qiu, X. Li, Y . Feng, Y . Yang, and C. Jiang, “Phys- gaussian: Physics-integrated 3d gaussians for generative dynamics,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 4389–4398
work page 2024
-
[11]
Gasp: Gaussian splatting for physic-based simulations,
P. Borycki, W. Smolak, J. Waczy ´nska, M. Mazur, S. Tadeja, and P. Spurek, “Gasp: Gaussian splatting for physic-based simulations,” arXiv preprint arXiv:2409.05819, 2024
-
[12]
Vr-gs: A physical dynamics-aware interactive gaussian splatting system in virtual reality,
Y . Jiang, C. Yu, T. Xie, X. Li, Y . Feng, H. Wang, M. Li, H. Lau, F. Gao, Y . Yanget al., “Vr-gs: A physical dynamics-aware interactive gaussian splatting system in virtual reality,” inACM SIGGRAPH 2024 Conference Papers, 2024, pp. 1–1
work page 2024
-
[13]
Deep long- tailed learning: A survey,
Y . Zhang, B. Kang, B. Hooi, S. Yan, and J. Feng, “Deep long- tailed learning: A survey,”IEEE transactions on pattern analysis and machine intelligence, vol. 45, no. 9, pp. 10 795–10 816, 2023
work page 2023
-
[14]
Structure-from-motion revisited,
J. L. Schonberger and J.-M. Frahm, “Structure-from-motion revisited,” inProceedings of the IEEE conference on computer vision and pattern recognition, 2016, pp. 4104–4113
work page 2016
-
[15]
Pointnet: Deep learning on point sets for 3d classification and segmentation,
C. R. Qi, H. Su, K. Mo, and L. J. Guibas, “Pointnet: Deep learning on point sets for 3d classification and segmentation,” inProceedings of the IEEE conference on computer vision and pattern recognition, 2017, pp. 652–660
work page 2017
-
[16]
V oxelnet: End-to-end learning for point cloud based 3d object detection,
Y . Zhou and O. Tuzel, “V oxelnet: End-to-end learning for point cloud based 3d object detection,” inProceedings of the IEEE conference on computer vision and pattern recognition, 2018, pp. 4490–4499
work page 2018
-
[17]
4d spatio-temporal convnets: Minkowski convolutional neural networks,
C. Choy, J. Gwak, and S. Savarese, “4d spatio-temporal convnets: Minkowski convolutional neural networks,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2019, pp. 3075–3084
work page 2019
-
[18]
Mine: Towards continuous depth mpi with nerf for novel view synthesis,
J. Li, Z. Feng, Q. She, H. Ding, C. Wang, and G. H. Lee, “Mine: Towards continuous depth mpi with nerf for novel view synthesis,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021, pp. 12 578–12 588
work page 2021
-
[19]
Panoptic neural fields: A semantic object-aware neural scene representation,
A. Kundu, K. Genova, X. Yin, A. Fathi, C. Pantofaru, L. J. Guibas, A. Tagliasacchi, F. Dellaert, and T. Funkhouser, “Panoptic neural fields: A semantic object-aware neural scene representation,” inPro- ceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 12 871–12 881
work page 2022
-
[20]
Nerf: Neural radiance field in 3d vision, a comprehensive review,
K. Gao, Y . Gao, H. He, D. Lu, L. Xu, and J. Li, “Nerf: Neural radiance field in 3d vision, a comprehensive review,”arXiv preprint arXiv:2210.00379, 2022
-
[21]
3d gaussian splatting in robotics: A survey,
S. Zhu, G. Wang, X. Kong, D. Kong, and H. Wang, “3d gaussian splatting in robotics: A survey,”arXiv preprint arXiv:2410.12262, 2024
-
[22]
nuscenes: A multimodal dataset for autonomous driving,
H. Caesar, V . Bankiti, A. H. Lang, S. V ora, V . E. Liong, Q. Xu, A. Krishnan, Y . Pan, G. Baldan, and O. Beijbom, “nuscenes: A multimodal dataset for autonomous driving,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2020, pp. 11 621–11 631
work page 2020
-
[23]
Carla: An open urban driving simulator,
A. Dosovitskiy, G. Ros, F. Codevilla, A. Lopez, and V . Koltun, “Carla: An open urban driving simulator,” inConference on robot learning. PMLR, 2017, pp. 1–16
work page 2017
-
[24]
Differentiable surface splatting for point-based geometry processing,
W. Yifan, F. Serena, S. Wu, C. ¨Oztireli, and O. Sorkine-Hornung, “Differentiable surface splatting for point-based geometry processing,” ACM Transactions On Graphics (TOG), vol. 38, no. 6, pp. 1–14, 2019
work page 2019
-
[25]
The material point method for simulating continuum materials,
C. Jiang, C. Schroeder, J. Teran, A. Stomakhin, and A. Selle, “The material point method for simulating continuum materials,” inAcm siggraph 2016 courses, 2016, pp. 1–52
work page 2016
-
[26]
Cruise: Cooperative reconstruction and editing in v2x scenarios using gaussian splatting,
H. Xu, S. Zhang, P. Li, B. Ye, X. Chen, H.-a. Gao, J. Zheng, X. Song, Z. Peng, R. Miaoet al., “Cruise: Cooperative reconstruction and editing in v2x scenarios using gaussian splatting,”arXiv preprint arXiv:2507.18473, 2025
-
[27]
M. A. Fischler and R. C. Bolles, “Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography,”Communications of the ACM, vol. 24, no. 6, pp. 381–395, 1981
work page 1981
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.