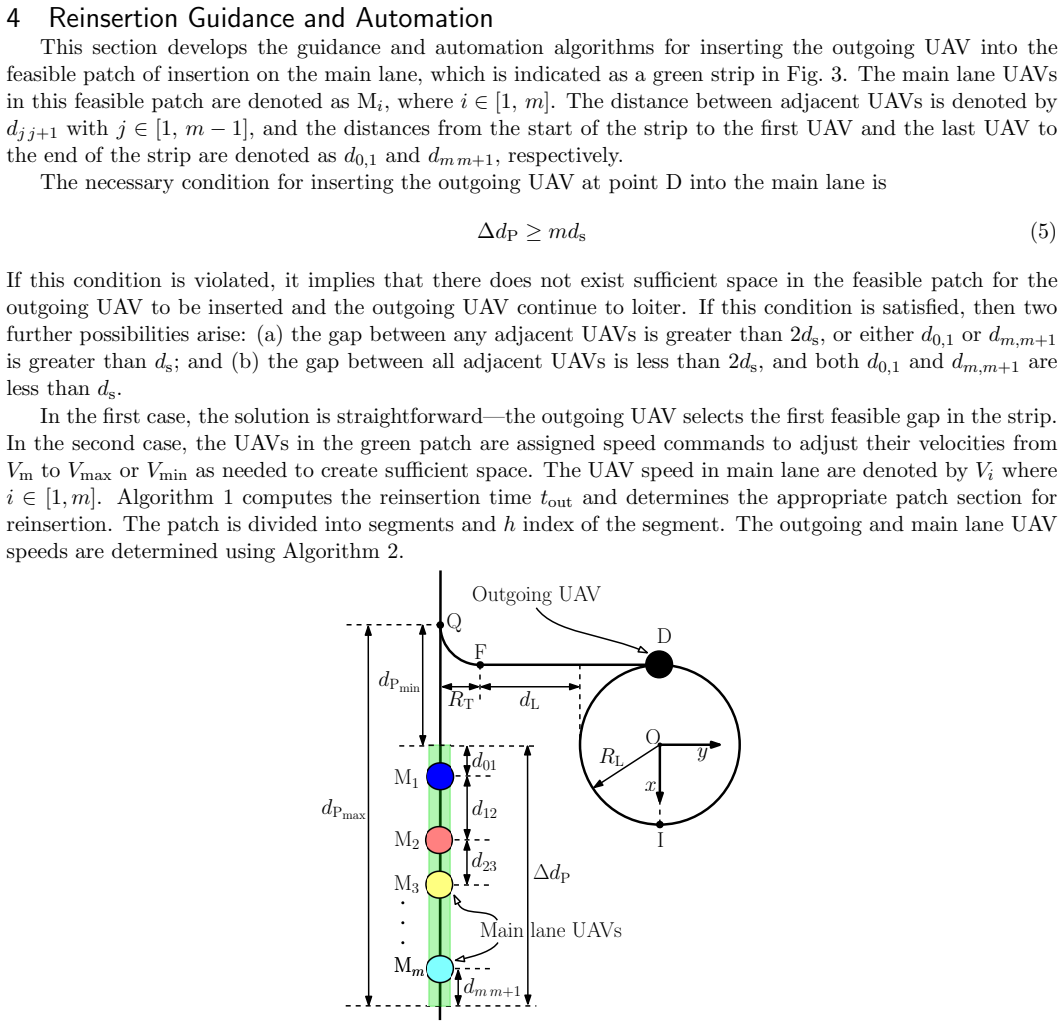
Recognition: unknown
Loiter UAV Reinsertion Guidance for Fixed-wing UAV Corridors
Pith reviewed 2026-05-14 17:40 UTC · model grok-4.3
The pith
A guidance algorithm computes the speed a loiter UAV must adopt in the transit lane to reinsert safely into the main lane.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Given the total number of loiter slots, UAV speed limits, and the minimum safety distance, a guidance algorithm is developed to compute the required speed of a loiter UAV in the transit lane to ensure safe reinsertion.
What carries the argument
The guidance algorithm that determines the transit lane speed required to maintain minimum safety distance during reinsertion from loiter slots.
Load-bearing premise
UAVs can instantly adopt and hold the computed speed with perfect knowledge of all other UAV positions and no external disturbances such as wind.
What would settle it
A simulation in which the UAV follows the computed speed exactly yet violates the minimum safety distance with another vehicle would falsify the central claim.
Figures





read the original abstract
This paper considers fixed-wing unmanned aerial vehicle (UAV) corridors comprising a main lane, a circular loiter lane for managing traffic congestion, and transit lanes connecting the two. In particular, we address the problem of conflict-free reinsertion of UAVs from the loiter lane back into the main lane. The loiter lane contains a fixed number of equidistant virtual slots that UAVs can occupy. Reinsertion of loiter UAVs into the main lane becomes essential either due to reduced traffic in the main lane or due to a loiter UAV needing to reach its destination urgently. Given the total number of loiter slots, UAV speed limits, and the minimum safety distance, a guidance algorithm is developed to compute the required speed of a loiter UAV in the transit lane to ensure safe reinsertion. The proposed guidance and automation strategies are validated through numerical simulations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a guidance algorithm for reinserting fixed-wing UAVs from a circular loiter lane (with fixed equidistant virtual slots) back into the main lane of a UAV corridor via transit lanes. Given the number of slots, speed bounds, and minimum safety distance, the algorithm computes a transit speed that guarantees conflict-free reinsertion; the method is validated solely through numerical simulations.
Significance. If the idealized assumptions hold, the geometrically derived speed-selection rule provides a parameter-free approach to deconfliction in structured UAV corridors, which could support scalable traffic management. The absence of analytic proofs, hardware validation, or disturbance modeling, however, confines the result to a preliminary simulation study whose safety guarantees do not yet extend to realistic fixed-wing dynamics.
major comments (2)
- [§3] §3 (Guidance Algorithm derivation): the speed command is computed under the assumption of instantaneous speed adoption and perfect, instantaneous global state knowledge; the manuscript provides no analysis showing that finite acceleration, minimum turn radius, or wind disturbances preserve the claimed separation distance.
- [§4] §4 (Numerical Simulations): the validation section reports only that simulations were performed, without error metrics, edge-case coverage (e.g., wind gusts, communication latency, or position uncertainty), or comparison against a baseline controller, leaving the safety guarantee unquantified.
minor comments (2)
- [§3] Notation for the transit-lane speed variable is introduced without an explicit equation number; adding an equation label would improve traceability from the geometric constraints to the final command.
- [Abstract] The abstract states validation occurs via numerical simulations but does not indicate whether the simulator includes the fixed-wing kinematic model used in the problem statement.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major comment below, indicating planned revisions where appropriate. The work focuses on a geometric guidance rule under idealized conditions as a foundational step for corridor management.
read point-by-point responses
-
Referee: §3 (Guidance Algorithm derivation): the speed command is computed under the assumption of instantaneous speed adoption and perfect, instantaneous global state knowledge; the manuscript provides no analysis showing that finite acceleration, minimum turn radius, or wind disturbances preserve the claimed separation distance.
Authors: We agree that the derivation relies on idealized assumptions of instantaneous speed changes and perfect global state knowledge to isolate the geometric deconfliction rule. These simplifications allow derivation of a parameter-free speed command that guarantees separation under the stated model. We will revise the manuscript to explicitly list these assumptions in the problem statement and add a limitations subsection in §3 discussing finite acceleration, turn radius constraints, and disturbance effects such as wind. Additional simulation cases will be included to illustrate sensitivity to small acceleration limits, but a complete robustness proof under arbitrary disturbances is not feasible within the current scope. revision: yes
-
Referee: §4 (Numerical Simulations): the validation section reports only that simulations were performed, without error metrics, edge-case coverage (e.g., wind gusts, communication latency, or position uncertainty), or comparison against a baseline controller, leaving the safety guarantee unquantified.
Authors: The referee correctly notes that the current §4 is primarily illustrative. We will expand the section to report quantitative metrics including minimum achieved separation distances over Monte Carlo runs, coverage of edge cases such as varying slot counts and speed limits, and a comparison against a baseline constant-speed reinsertion controller. This will better quantify performance under the simulated idealized dynamics. revision: yes
- Hardware validation and full analytic proofs under realistic fixed-wing dynamics with disturbances cannot be provided in this revision, as the study is limited to numerical simulations and the authors lack access to experimental UAV facilities for hardware-in-the-loop testing.
Circularity Check
No significant circularity; derivation is direct geometric computation
full rationale
The paper states that the guidance algorithm computes the required transit-lane speed directly from the inputs of total loiter slots, UAV speed limits, and minimum safety distance to enforce separation. This is a forward geometric calculation with no evidence of self-definition (e.g., speed defined in terms of the output separation), fitted parameters renamed as predictions, or load-bearing self-citations. The abstract and described approach present an independent derivation chain that solves for speed to satisfy the stated constraints, remaining self-contained without reduction to its own outputs by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption UAVs maintain constant speed within given limits during transit
- domain assumption Positions of all UAVs are known perfectly at the moment of reinsertion decision
Reference graph
Works this paper leans on
-
[1]
Unmanned aerial vehicle communications for civil applicat ions: A review
Mohammad Ghamari, Pablo Rangel, Mehrube Mehrubeoglu, G irma S Tewolde, and R Simon Sherratt. Unmanned aerial vehicle communications for civil applicat ions: A review. IEEE Access, 10:102492–102531, 2022
2022
-
[2]
Intercepti ng intruder on a circular boundary
Kedarisetty Siddhardha and Ashwini Ratnoo. Intercepti ng intruder on a circular boundary. Journal of Guidance, Control, and Dynamics , 46(1):186–197, 2023
2023
-
[3]
Uav-based delivery systems: A systematic review, current trends, and research challenges
Francesco Betti Sorbelli. Uav-based delivery systems: A systematic review, current trends, and research challenges. Journal on Autonomous Transportation Systems , 1(3):1–40, 2024
2024
-
[4]
A novel quad-rotor configurati on capable of attitude control through center of gravity variation
Kedarisetty Siddhardha. A novel quad-rotor configurati on capable of attitude control through center of gravity variation. In 2018 Indian Control Conference (ICC) , pages 346–351. IEEE, 2018
2018
-
[5]
Desig n of a novel fully-active pemfc-lithium bat- tery hybrid power system based on two automatic on/off switch es for unmanned aerial vehicle applications
Chunwu Xiao, Bin Wang, Chaohui Wang, and Yizhe Yan. Desig n of a novel fully-active pemfc-lithium bat- tery hybrid power system based on two automatic on/off switch es for unmanned aerial vehicle applications. Energy Conversion and Management , 292:117417, 2023
2023
-
[6]
N- point polyelliptic guidance
Ronny Tsalik, Siddhardha Kedarisetty, and Tal Shima. N- point polyelliptic guidance. Journal of Guidance, Control, and Dynamics , 48(2):212–225, 2025
2025
-
[7]
Adaptive Decentralized Congestion Avoidan ce in Two-Dimensional Traffic
S Maniccam. Adaptive Decentralized Congestion Avoidan ce in Two-Dimensional Traffic. Physica A: Statistical Mechanics and its Applications , 363(2):512–526, 2006. doi: 10.1016/j.physa.2005.08.03 9
-
[8]
Int egrated Surface-airspace Model of Airport Departures
Sandeep Badrinath, Max Z Li, and Hamsa Balakrishnan. Int egrated Surface-airspace Model of Airport Departures. Journal of Guidance, Control, and Dynamics , 42(5):1049–1063, 2019. doi: 10.2514/1.G003964
-
[9]
Traffic Management Protocols for Advanced Air Mobility
Christopher Chin, Victor Qin, Karthik Gopalakrishnan, and Hamsa Balakrishnan. Traffic Management Protocols for Advanced Air Mobility. Frontiers in Aerospace Engineering, 2:1176969, 2023. doi: 10.3389/ fpace.2023.1176969
-
[10]
A UA V Traffic Management System for India: Requirement and Preliminary Analysis
Anshul Yadav, Salil Goel, Bharat Lohani, and Shubhansh i Singh. A UA V Traffic Management System for India: Requirement and Preliminary Analysis. Journal of the Indian Society of Remote Sensing , 49(3): 515–525, 2021. doi: 10.1007/s12524-020-01226-0
-
[11]
UAS Traffic Management (UTM) Concept of Operations to Sa fely Enable Low Altitude Flight Operations
Thomas Prevot, Joseph Rios, Parimal Kopardekar, John E Robinson III, Marcus Johnson, and Jaewoo Jung. UAS Traffic Management (UTM) Concept of Operations to Sa fely Enable Low Altitude Flight Operations. In Proceedings of the AIAA Aviation Technology, Integration, an d Operations Conference , Washington, D.C., USA, AIAA Paper 2016-3292, June 2016. doi : 10.2...
-
[12]
Mikko Huttunen. The U-space Concept. Air and Space Law , 44(1), 2019. doi: 10.54648/aila2019005
-
[13]
CO RRIDRONE: Corridors for Drones, An Adaptive On-Demand Multi-Lane Design and Testbed, 2020
Lima Agnel Tony, Ashwini Ratnoo, and Debasish Ghose. CO RRIDRONE: Corridors for Drones, An Adaptive On-Demand Multi-Lane Design and Testbed, 2020. UR L https://arxiv.org/abs/2012.01019
-
[14]
EuroDRONE, a European unmanned traffic management testbed for U-space
Vaios Lappas, Giorgos Zoumponos, Vassilis Kostopoulo s, Hae In Lee, Hyo-Sang Shin, Antonios Tsourdos, Marco Tantardini, Dennis Shomko, Jose Munoz, Epameinondas Amoratis, et al. EuroDRONE, a European unmanned traffic management testbed for U-space. Drones, 6(2):53, 2022. doi: 10.3390/drones6020053
-
[15]
Lima Agnel Tony, Ashwini Ratnoo, and Debasish Ghose. La ne Geometry, Compliance Levels, and Adap- tive Geo-fencing in CORRIDRONE Architecture for Urban Mobi lity. In Proceedings of the Interna- tional Conference on Unmanned Aircraft Systems , pages 1611–1617, Athens, Greece, 2021. IEEE. doi: 10.1109/ICUAS51884.2021.9476745
-
[16]
Signed Distance Function based Geofencing for UA V Corridor
Aashay A Bhise, Stuti Garg, Ashwini Ratnoo, and Debasis h Ghose. Signed Distance Function based Geofencing for UA V Corridor. In Proceedings of the AIAA Scitech Forum , San Diego, USA, AIAA Paper 2022-1507, January 2022. doi: 10.2514/6.2022-1507. 10
-
[17]
Recedi ng Horizon Path Planning with Implicit Safety Guarantees
Tom Schouwenaars, Jonathan How, and Eric Feron. Recedi ng Horizon Path Planning with Implicit Safety Guarantees. In Proceedings of the American Control Conference, volume 6, pages 5576–5581, Boston, USA,
-
[18]
doi: 10.23919/ACC.2004.1384742
IEEE. doi: 10.23919/ACC.2004.1384742
-
[19]
Development of an Area o f Interest Extended Coverage Loitering Path Planner
Jay Wilhelm and Jonathan Rojas. Development of an Area o f Interest Extended Coverage Loitering Path Planner. In Proceedings of the AIAA Infotech@ Aerospace . California, USA, AIAA Paper 2016-0255, January 2016. doi: 10.2514/6.2016-0255
-
[20]
Direc t Entry Minimal Path UA V Loitering Path Planning
Jay P Wilhelm, Garrett S Clem, and Gina M Eberhart. Direc t Entry Minimal Path UA V Loitering Path Planning. Aerospace, 4(2):23, 2017. doi: 10.3390/aerospace4020023
-
[21]
Cooperati ve loiter lane diversion guidance planning for fixed-wing uav corridors
Siddhardha Kedarisetty and Ashwini Ratnoo. Cooperati ve loiter lane diversion guidance planning for fixed-wing uav corridors. In AIAA SCITECH 2023 Forum , page 2164, 2023
2023
-
[22]
Loiter tra jectory planning for fixed-wing uav corridors
Siddhardha Kedarisetty and Ashwini Ratnoo. Loiter tra jectory planning for fixed-wing uav corridors. Journal of Guidance, Control, and Dynamics , pages 1–12, 2025. 11
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.