Recognition: 1 theorem link
· Lean TheoremMotion Planning for Autonomous Vehicles using Optimization over Graphs of Convex Sets
Pith reviewed 2026-05-15 04:42 UTC · model grok-4.3
The pith
Optimization over graphs of convex sets approximates nonlinear optimal control for autonomous vehicle motion planning with greater efficiency.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The GCS-based method generates collision-free and dynamically consistent trajectories that closely match those obtained from the nonlinear program, while exhibiting improved computational efficiency and reduced sensitivity to initialization.
What carries the argument
Graphs of Convex Sets (GCS) organizing free space into a directed graph of convex regions, combined with Bezier curve parameterization of spatial paths and polynomial time-scaling, under convex constraints from a linear-tire bicycle model.
If this is right
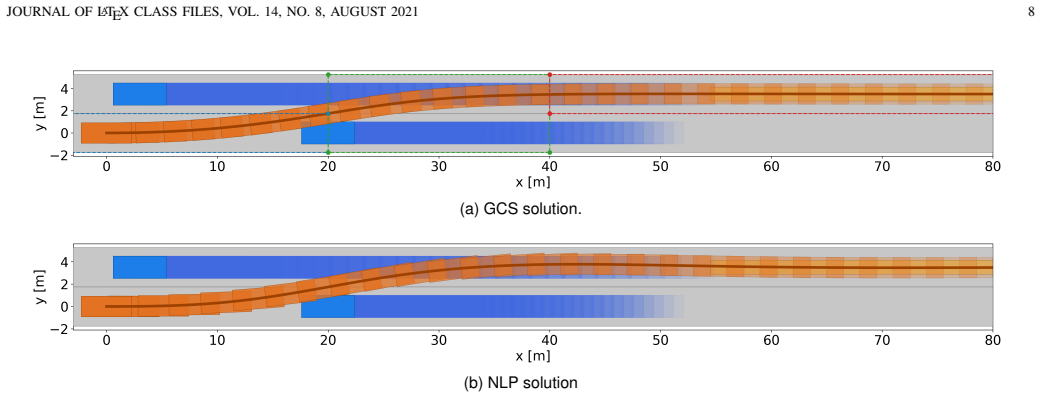
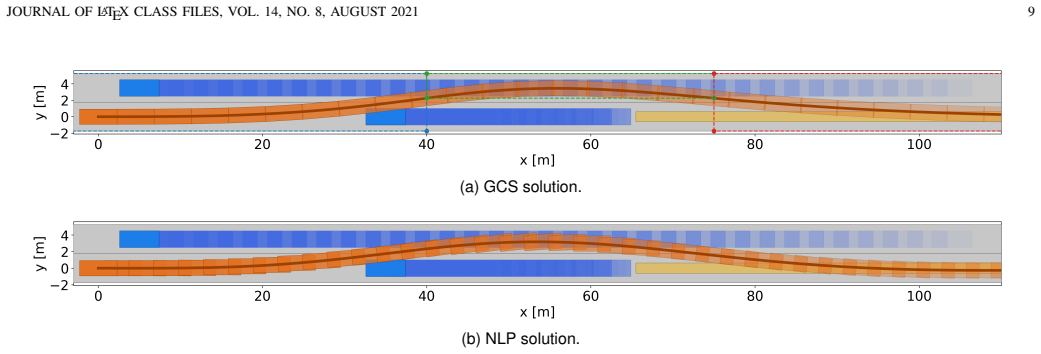
- Produces trajectories that satisfy collision avoidance and approximate dynamic feasibility in static obstacle and lane-change scenarios.
- Offers a convex relaxation that captures dominant geometric and dynamic effects of full nonlinear formulations.
- Reduces computational time compared to direct nonlinear optimal control.
- Lowers dependence on accurate initial guesses for the solver.
Where Pith is reading between the lines
- Extending the graph to include time-varying regions could handle moving obstacles.
- Combining GCS with perception modules might enable online replanning in uncertain environments.
- The convex structure could facilitate warm-starting or parallel computation in multi-vehicle settings.
Load-bearing premise
A simplified bicycle model with small-slip and linear tire assumptions provides sufficient convex constraints to enforce approximate dynamic feasibility.
What would settle it
Comparing trajectories in high-slip maneuvers, such as sharp turns at high speeds, where the GCS solutions deviate significantly from the nonlinear program or real vehicle behavior.
Figures



read the original abstract
Motion planning for autonomous vehicles requires generating collision-free and dynamically feasible trajectories in complex environments under real-time constraints. While nonlinear optimal control formulations provide high-fidelity solutions, they are computationally demanding and sensitive to initialization, whereas geometric planning methods scale well but often decouple path selection from trajectory optimization. This paper studies the extent to which optimization over Graphs of Convex Sets (GCS) can approximate solutions of nonlinear optimal control problems in the context of autonomous driving. The free space is represented as a finite union of convex regions organized as a directed graph, allowing nonconvex geometry to be handled through discrete connectivity decisions while maintaining convex trajectory constraints within each region. Vehicle motion is parameterized using Bezier curves for the spatial path and a polynomial time-scaling function for temporal evolution. Under small-slip and linear tire assumptions, a simplified dynamic bicycle model enables approximate enforcement of dynamic feasibility through convex constraints on trajectory derivatives. The approach is evaluated in CommonRoad scenarios involving static obstacle avoidance and lane-changing maneuvers, and is compared against a nonlinear discrete-time optimal control formulation. The results indicate that the GCS-based method generates collision-free and dynamically consistent trajectories that closely match those obtained from the nonlinear program, while exhibiting improved computational efficiency and reduced sensitivity to initialization. These findings suggest that GCS provides a structured approximation of nonlinear motion planning problems, capturing dominant geometric and dynamic effects while preserving convexity in the continuous relaxation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that optimization over Graphs of Convex Sets (GCS) approximates nonlinear optimal control for autonomous vehicle motion planning. Free space is modeled as a directed graph of convex regions; trajectories are parameterized by Bezier curves for the path and a polynomial time-scaling function; under linear-tire and small-slip assumptions a simplified bicycle model yields convex constraints on derivatives. On CommonRoad static-obstacle and lane-change scenarios the GCS solutions are reported to produce collision-free trajectories that closely match those of a nonlinear discrete-time program while improving runtime and initialization robustness.
Significance. If the reported approximation quality holds under the stated modeling assumptions, the work supplies a structured convex relaxation that retains geometric nonconvexity handling via graph connectivity while preserving convexity inside regions. The direct empirical comparison against an independent nonlinear baseline on standard benchmarks, together with the explicit parameterization choices, constitutes a concrete strength that supports the central claim of practical utility for real-time planning.
major comments (2)
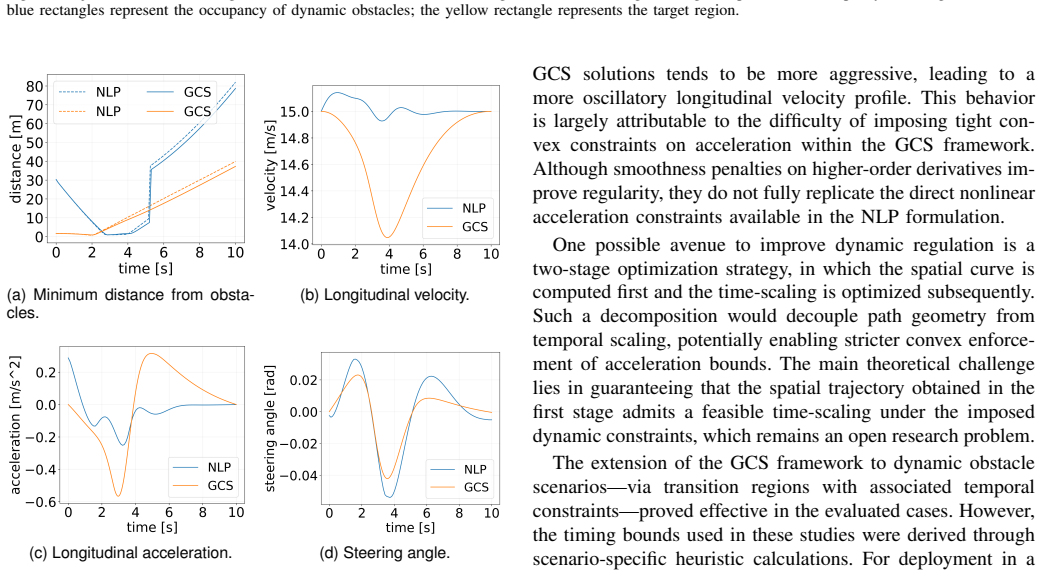
- [§3.2] §3.2 (Dynamic Feasibility): the claim that GCS trajectories are 'dynamically consistent' with the nonlinear program rests on convex constraints derived from the linear-tire, small-slip bicycle model. In the evaluated lane-change cases, peak lateral accelerations can produce slip angles outside the linear regime; without a post-hoc nonlinear tire-model verification the observed match may be an artifact of the shared simplified dynamics rather than evidence of genuine approximation quality.
- [§4.3] §4.3 and Table 2: the efficiency and robustness advantages are quantified only for the specific Bezier degree and convex-region decomposition chosen; the manuscript does not report sensitivity of these metrics to those free parameters, weakening the general claim that GCS is less sensitive to initialization than the nonlinear baseline.
minor comments (2)
- [Figure 3] Figure 3: axis labels and legend entries for the GCS versus nonlinear trajectories are too small; increasing font size would improve readability of the overlay comparison.
- Notation: the time-scaling polynomial is introduced without an explicit equation number; adding an equation label would clarify subsequent references to its coefficients.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments, which help clarify the scope and strengthen the presentation of our results. We respond to each major comment below and indicate the planned revisions.
read point-by-point responses
-
Referee: [§3.2] §3.2 (Dynamic Feasibility): the claim that GCS trajectories are 'dynamically consistent' with the nonlinear program rests on convex constraints derived from the linear-tire, small-slip bicycle model. In the evaluated lane-change cases, peak lateral accelerations can produce slip angles outside the linear regime; without a post-hoc nonlinear tire-model verification the observed match may be an artifact of the shared simplified dynamics rather than evidence of genuine approximation quality.
Authors: We thank the referee for this observation. The nonlinear baseline is deliberately formulated with the identical simplified bicycle model (linear tire, small-slip assumptions) so that the comparison isolates the effect of the convex relaxation versus nonlinear optimization under the same modeling assumptions; the GCS method is explicitly presented as an approximation within this framework rather than a claim of fidelity to full nonlinear tire physics. To address the concern about regime validity, we will add a post-hoc verification step in the revised §3.2 that recomputes slip angles and lateral forces on the obtained GCS trajectories using a nonlinear (Pacejka) tire model. Any trajectories exceeding the linear regime will be flagged and discussed, with possible tightening of acceleration bounds or scenario adjustments if needed. This verification will be reported alongside the existing results. revision: yes
-
Referee: [§4.3] §4.3 and Table 2: the efficiency and robustness advantages are quantified only for the specific Bezier degree and convex-region decomposition chosen; the manuscript does not report sensitivity of these metrics to those free parameters, weakening the general claim that GCS is less sensitive to initialization than the nonlinear baseline.
Authors: We agree that explicit sensitivity analysis would strengthen the general claims. The chosen Bezier degree and region decomposition follow standard GCS practices for the CommonRoad scenarios, but we will expand §4.3 with additional experiments that vary the Bezier degree (5, 7, 9) and use both coarser and finer convex decompositions. For each combination we will report runtime, success rate, and initialization robustness (measured by convergence from random initial guesses) in an updated Table 2 and accompanying text. This will demonstrate that the reported advantages are not artifacts of a single parameter setting. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper derives GCS-based trajectories via Bezier parameterization and convex constraints from a linear tire/small-slip bicycle model, then directly compares them to an independent nonlinear optimal control formulation on CommonRoad scenarios. No central result reduces to a fitted parameter, self-defined quantity, or load-bearing self-citation; the modeling assumptions are stated explicitly and the benchmark is external. The derivation chain remains self-contained.
Axiom & Free-Parameter Ledger
free parameters (2)
- Bezier curve degree
- Convex region decomposition
axioms (2)
- domain assumption Free space can be expressed as a finite union of convex sets connected by a directed graph
- domain assumption Small-slip and linear tire model
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Under small-slip and linear tire assumptions, a simplified dynamic bicycle model enables approximate enforcement of dynamic feasibility through convex constraints on trajectory derivatives.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Model pre- dictive control for autonomous ground vehicles: a review,
S. Yu, M. Hirche, Y . Huang, H. Chen, and F. Allg ¨ower, “Model pre- dictive control for autonomous ground vehicles: a review,”Autonomous Intelligent Systems, vol. 1, 2021
work page 2021
-
[2]
C. Badue, R. Guidolini, R. V . Carneiro, P. Azevedo, V . B. Cardoso, A. Forechi, L. Jesus, R. Berriel, T. M. Paixao, F. Mutzet al., “Self- driving cars: A survey,”Expert systems with applications, vol. 165, p. 113816, 2021
work page 2021
-
[3]
A review of learning-based motion planning: Toward a data-driven optimal control approach,
J. Hu, Y . Chang, and H. Wang, “A review of learning-based motion planning: Toward a data-driven optimal control approach,”ArXiv, vol. abs/2512.11944, 2025. [Online]. Available: https://api.semanticscholar. org/CorpusID:283895814
-
[4]
A survey of motion planning and control techniques for self-driving urban vehicles,
B. Paden, M. ˇC´ap, S. Z. Yong, D. Yershov, and E. Frazzoli, “A survey of motion planning and control techniques for self-driving urban vehicles,” IEEE Transactions on intelligent vehicles, vol. 1, no. 1, pp. 33–55, 2016
work page 2016
-
[5]
Spatio-temporal lattice planning using opti- mal motion primitives,
A. Botros and S. L. Smith, “Spatio-temporal lattice planning using opti- mal motion primitives,”IEEE Transactions on Intelligent Transportation Systems, vol. 24, no. 11, pp. 11 950–11 962, 2023
work page 2023
-
[6]
Motion planning for autonomous driving: The state of the art and future perspectives,
S. Teng, X. Hu, P. Deng, B. Li, Y . Li, Y . Ai, D. Yang, L. Li, Z. Xuanyuan, F. Zhuet al., “Motion planning for autonomous driving: The state of the art and future perspectives,”IEEE Transactions on Intelligent V ehicles, vol. 8, no. 6, pp. 3692–3711, 2023
work page 2023
-
[7]
Rapidly-exploring random trees: A new tool for path planning,
S. LaValle, “Rapidly-exploring random trees: A new tool for path planning,”Research Report 9811, 1998
work page 1998
-
[8]
Rdt-rrt: Real-time double-tree rapidly-exploring random tree path planning for autonomous vehicles,
J. Yu, C. Chen, A. Arab, J. Yi, X. Pei, and X. Guo, “Rdt-rrt: Real-time double-tree rapidly-exploring random tree path planning for autonomous vehicles,”Expert Systems with Applications, vol. 240, p. 122510, 2024
work page 2024
-
[9]
Sampling-based motion planning: A comparative review,
A. Orthey, C. Chamzas, and L. E. Kavraki, “Sampling-based motion planning: A comparative review,”Annual Review of Control, Robotics, and Autonomous Systems, vol. 7, 2023
work page 2023
-
[10]
Risk-aware self-consistent imitation learning for trajectory planning in autonomous driving,
Y . Fan, Y . Li, and S. Wang, “Risk-aware self-consistent imitation learning for trajectory planning in autonomous driving,” inEuropean Conference on Computer Vision. Springer, 2024, pp. 270–287
work page 2024
-
[11]
Learning hierarchical behavior and motion planning for autonomous driving,
J. Wang, Y . Wang, D. Zhang, Y . Yang, and R. Xiong, “Learning hierarchical behavior and motion planning for autonomous driving,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2020, pp. 2235–2242
work page 2020
-
[12]
Diffusion-es: Gradient-free planning with diffusion for autonomous and instruction-guided driving,
B. Yang, H. Su, N. Gkanatsios, T.-W. Ke, A. Jain, J. Schneider, and K. Fragkiadaki, “Diffusion-es: Gradient-free planning with diffusion for autonomous and instruction-guided driving,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2024, pp. 15 342–15 353
work page 2024
-
[13]
Z. Zhu, H. Liu, W. Wang, J. Duan, H. Zhao, and J. Ma, “Diffeomorphism-transformed iterative linear quadratic regulator for constrained motion planning in autonomous driving,”IEEE Transactions on Intelligent Transportation Systems, vol. 26, no. 10, pp. 15 175–15 189, 2025
work page 2025
-
[14]
J. T. Betts,Practical methods for optimal control and estimation using nonlinear programming. SIAM, 2010
work page 2010
-
[15]
Nmpc tra- jectory planner for urban autonomous driving,
F. Micheli, M. Bersani, S. Arrigoni, F. Braghin, and F. Cheli, “Nmpc tra- jectory planner for urban autonomous driving,”V ehicle system dynamics, vol. 61, no. 5, pp. 1387–1409, 2023
work page 2023
-
[16]
Rti-nmpc for control of autonomous vehicles using implicit discretization methods,
M. Wagner and J. E. Normey-Rico, “Rti-nmpc for control of autonomous vehicles using implicit discretization methods,” inSimp ´osio Brasileiro de Automac ¸˜ao Inteligente-SBAI, vol. 1, no. 2, 2023
work page 2023
-
[17]
C. Chen, Y . He, C. Bu, J. Han, and X. Zhang, “Quartic b ´ezier curve based trajectory generation for autonomous vehicles with curvature and velocity constraints,” in2014 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2014, pp. 6108–6113
work page 2014
-
[18]
Local trajectory planning and tracking of autonomous vehicles, using clothoid tentacles method,
C. Alia, T. Gilles, T. Reine, and C. Ali, “Local trajectory planning and tracking of autonomous vehicles, using clothoid tentacles method,” in 2015 IEEE intelligent vehicles symposium (IV). IEEE, 2015, pp. 674– 679
work page 2015
-
[19]
Graph-theoretic b ´ezier curve optimization over safe corridors for safe and smooth motion planning,
S. Zayou and O. Arslan, “Graph-theoretic b ´ezier curve optimization over safe corridors for safe and smooth motion planning,” in2025 European Control Conference (ECC), 2025, pp. 1364–1371
work page 2025
-
[20]
J. Wang, Y . Yan, K. Zhang, Y . Chen, M. Cao, and G. Yin, “Path planning on large curvature roads using driver-vehicle-road system based on the kinematic vehicle model,”IEEE Transactions on V ehicular Technology, vol. 71, no. 1, pp. 311–325, 2021
work page 2021
-
[21]
Motion planning around obstacles with convex optimization,
T. Marcucci, M. Petersen, D. V on Wrangel, and R. Tedrake, “Motion planning around obstacles with convex optimization,”Science robotics, vol. 8, no. 84, p. eadf7843, 2023
work page 2023
-
[22]
A unified and scalable method for optimization over graphs of convex sets,
T. Marcucci, “A unified and scalable method for optimization over graphs of convex sets,”arXiv preprint arXiv:2510.20184, 2025
-
[23]
Rajamani,V ehicle dynamics and control
R. Rajamani,V ehicle dynamics and control. Springer Science & Business Media, 2011
work page 2011
-
[24]
Differential flatness of mechanical control systems: A catalog of prototype systems,
M. Rathinam, R. M. Murray, and W. M. Sluis, “Differential flatness of mechanical control systems: A catalog of prototype systems,” Dynamic Systems and Control: V olume 1 — Vibration Control; Dynamic Systems; Robotics; Sliding Mode Control; Robust and Nonlinear Control; Automated Modeling; Control of Manufacturing Processes; Precision Control, 1995. [Onlin...
work page 1995
-
[25]
S. Maierhofer, M. Klischat, and M. Althoff, “Commonroad scenario designer: An open-source toolbox for map conversion and scenario creation for autonomous vehicles,” inProc. of the IEEE Int. Conf. on Intelligent Transportation Systems, 2021, pp. 3176–3182
work page 2021
-
[26]
Computing large convex regions of obstacle- free space through semidefinite programming,
R. Deits and R. Tedrake, “Computing large convex regions of obstacle- free space through semidefinite programming,” inAlgorithmic F ounda- tions of Robotics XI: Selected Contributions of the Eleventh International Workshop on the Algorithmic F oundations of Robotics. Springer, 2015, pp. 109–124
work page 2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.