Recognition: no theorem link
Vision-Based Water Level and Flow Estimation
Pith reviewed 2026-05-15 05:34 UTC · model grok-4.3
The pith
An integrated vision framework using physical priors and filtering improves accuracy of water level and flow estimates.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that synergizing SOTA vision models with statistical modeling, physical priors, and robust filtering strategies improves the accuracy of water level detection and flow estimation over existing vision-based techniques while increasing robustness and reducing calibration demands.
What carries the argument
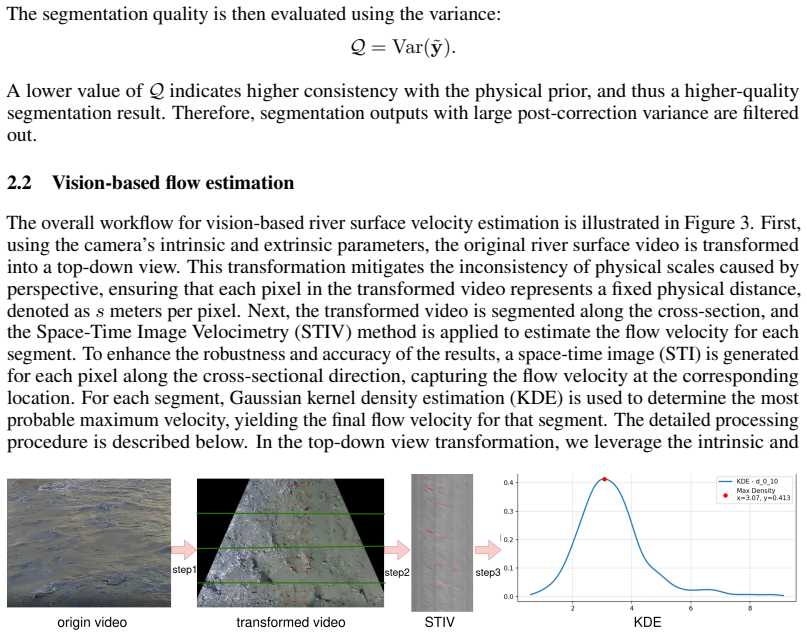
An integrated framework that fuses state-of-the-art vision models, statistical modeling, physical priors, and robust filtering to process images for water level and surface velocity measurements.
If this is right
- Higher precision water level readings become feasible in variable outdoor conditions.
- River flow estimates gain reliability through combined velocity and level measurements.
- Monitoring systems require less manual site calibration and offer automated data records.
- Interpretability of results increases relative to pure sensor or black-box vision approaches.
- Overall system robustness improves for continuous environmental observation.
Where Pith is reading between the lines
- The same framework could support real-time alerts for rising water levels during storms.
- Extending the priors to account for sediment or vegetation might broaden use to other waterways.
- Deployment on low-cost cameras could enable dense networks of river gauges where traditional sensors are impractical.
Load-bearing premise
Physical priors and filtering strategies can reliably compensate for environmental variations and calibration difficulties when combined with current vision models in real-world river settings.
What would settle it
A side-by-side field deployment on a monitored river showing no reduction in root-mean-square error for water level or velocity estimates compared with a baseline SOTA vision model under changing weather and lighting.
Figures


read the original abstract
With the rapid evolution of computer vision, vision-based methodologies for water level and river surface velocity estimation have reached significant maturity. Compared to traditional sensing, these techniques offer superior interpretability, automated data archiving, and enhanced system robustness. However, challenges such as environmental sensitivity, limited precision, and complex site calibration persist. This work proposes an integrated framework that synergizes state-of-the-art (SOTA) vision models with statistical modeling. By leveraging physical priors and robust filtering strategies, we improve the accuracy of water level detection and flow estimation. Code will be available at https://github.com/sunzx97/Vision_Based_Water_Level_and_Flow_Estimation.git
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes an integrated framework that synergizes state-of-the-art vision models with statistical modeling, physical priors, and robust filtering strategies to improve the accuracy of water level detection and river surface velocity (flow) estimation, offering advantages in interpretability, automated archiving, and robustness over traditional sensors while addressing environmental sensitivity, limited precision, and calibration challenges.
Significance. If the claimed accuracy gains are substantiated with quantitative validation, the work could advance non-contact hydrological monitoring by providing a more robust, interpretable alternative to contact-based sensors, with potential applications in flood warning and water resource management.
major comments (2)
- [Abstract] Abstract: the central claim that 'leveraging physical priors and robust filtering strategies' improves accuracy is unsupported by any quantitative results, error metrics, validation datasets, or ablation studies; no baseline comparisons or environmental-variation tests are referenced.
- [Methods] Methods (implied by abstract description): no concrete formulation is given for the physical priors (e.g., hard/soft constraints on surface velocity or level-height mapping) or the filtering strategies (e.g., filter type, update rules, or how they interact with SOTA model outputs), making it impossible to distinguish the contribution from generic post-processing.
minor comments (1)
- [Abstract] Abstract: the GitHub link is mentioned but no supplementary material, code availability statement, or reproducibility details are provided in the text.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our work. We address the major comments point by point below, indicating the revisions we plan to implement.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that 'leveraging physical priors and robust filtering strategies' improves accuracy is unsupported by any quantitative results, error metrics, validation datasets, or ablation studies; no baseline comparisons or environmental-variation tests are referenced.
Authors: We acknowledge this point. The current abstract makes a claim about accuracy improvements without referencing supporting evidence. In the revised version, we will update the abstract to include key quantitative results, such as specific error metrics from our validation experiments, baseline comparisons, and tests under varying environmental conditions. revision: yes
-
Referee: [Methods] Methods (implied by abstract description): no concrete formulation is given for the physical priors (e.g., hard/soft constraints on surface velocity or level-height mapping) or the filtering strategies (e.g., filter type, update rules, or how they interact with SOTA model outputs), making it impossible to distinguish the contribution from generic post-processing.
Authors: We agree that the methods description lacks sufficient detail on the physical priors and filtering strategies. We will revise the methods section to include concrete formulations: physical priors will be specified as soft constraints based on hydrological principles (e.g., level-height mapping and velocity bounds), and the filtering strategies will be detailed with the filter type, update equations, and interaction with SOTA model outputs to clearly differentiate from generic post-processing. revision: yes
Circularity Check
No circularity: proposal uses external SOTA models and priors without self-referential derivations or fitted inputs renamed as predictions
full rationale
The manuscript abstract and description present a high-level framework proposal that combines existing SOTA vision models with statistical modeling, physical priors, and filtering. No equations, parameter-fitting steps, or derivation chains are shown that reduce by construction to the inputs themselves. No self-citations are invoked as load-bearing uniqueness theorems, and no ansatz or renaming of known results occurs internally. The central claim of accuracy improvement is stated as an empirical outcome of the integration rather than a tautological re-expression of fitted values. This is the common case of a methods proposal that remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Zhifeng Xie, Jianhui Jin, Jianping Wang, Rongxing Zhang, and Shenghong Li. Application of deep learning techniques in water level measurement: Combining improved segformer- unet model with virtual water gauge.Applied Sciences, 13(9), 2023. ISSN 2076-3417. doi: 10.3390/app13095614. URLhttps://www.mdpi.com/2076-3417/13/9/5614
-
[2]
Konstantin Sofiiuk, Ilia Petrov, and Anton Konushin. Reviving iterative training with mask guidance for interactive segmentation.arXiv preprint arXiv:2102.06583, 2021
-
[3]
SAM 2: Segment Anything in Images and Videos
Nikhila Ravi, Valentin Gabeur, Yuan-Ting Hu, Ronghang Hu, Chaitanya Ryali, Tengyu Ma, Haitham Khedr, Roman Rädle, Chloe Rolland, Laura Gustafson, Eric Mintun, Junting Pan, Kalyan Vasudev Alwala, Nicolas Carion, Chao-Yuan Wu, Ross Girshick, Piotr Dollár, and Christoph Feichtenhofer. Sam 2: Segment anything in images and videos.arXiv preprint arXiv:2408.007...
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[4]
Implementation of inverse perspective mapping for camera- vision water-level measurements
Lung-Chih Kuo and Cheng-Chi Tai. Implementation of inverse perspective mapping for camera- vision water-level measurements. In2020 International Computer Symposium (ICS), pages 348–351, 2020. doi: 10.1109/ICS51289.2020.00075
-
[5]
S. M. H. Erfani, C. Smith, Z. Wu, E. A. Shamsabadi, F. Khatami, A. R. J. Downey, J. Imran, and E. Goharian. Eye of horus: a vision-based framework for real-time water level measurement.Hy- drology and Earth System Sciences, 27(22):4135–4149, 2023. doi: 10.5194/hess-27-4135-2023. URLhttps://hess.copernicus.org/articles/27/4135/2023/
-
[6]
LightGlue: Local Feature Matching at Light Speed
Philipp Lindenberger, Paul-Edouard Sarlin, and Marc Pollefeys. LightGlue: Local Feature Matching at Light Speed. InICCV, 2023
work page 2023
-
[7]
Lung-Chih Kuo and Cheng-Chi Tai. Robust image-based water-level estimation using single- camera monitoring.IEEE Transactions on Instrumentation and Measurement, 71:1–11, 2022. doi: 10.1109/TIM.2022.3161691
-
[8]
X. Blanch, J. Grundmann, R. Hedel, and A. Eltner. Ai image-based method for a robust automatic real-time water level monitoring: a long-term application case.Hydrology and Earth System Sciences, 30(3):797–824, 2026. doi: 10.5194/hess-30-797-2026. URL https: //hess.copernicus.org/articles/30/797/2026/
-
[9]
Ishan Ayus, Narayanan Natarajan, and Deepak Gupta. Prediction of water level using machine learning and deep learning techniques.Iranian Journal of Science and Technology, Transactions of Civil Engineering, 47(4):2437–2447, 2023
work page 2023
-
[10]
Ichiro Fujita, Hideki Watanabe, and Ryota Tsubaki. Development of a non-intrusive and efficient flow monitoring technique: The space-time image velocimetry (stiv).International Journal of River Basin Management, 5(2):105–114, 2007
work page 2007
-
[11]
Ichiro Fujita, Marian Muste, and Anton Kruger. Large-scale particle image velocimetry for flow analysis in hydraulic engineering applications.Journal of hydraulic Research, 36(3):397–414, 1998
work page 1998
-
[12]
Flavia Tauro, Fabio Tosi, Stefano Mattoccia, Elena Toth, Rodolfo Piscopia, and Salvatore Grimaldi. Optical tracking velocimetry (otv): Leveraging optical flow and trajectory-based filtering for surface streamflow observations.Remote Sensing, 10(12):2010, 2018
work page 2010
-
[13]
Dense optical tracking: Connecting the dots
Guillaume Le Moing, Jean Ponce, and Cordelia Schmid. Dense optical tracking: Connecting the dots. InCVPR, 2024
work page 2024
-
[14]
Cotracker3: Simpler and better point tracking by pseudo-labelling real videos
Nikita Karaev, Iurii Makarov, Jianyuan Wang, Natalia Neverova, Andrea Vedaldi, and Christian Rupprecht. Cotracker3: Simpler and better point tracking by pseudo-labelling real videos. In Proc. arXiv:2410.11831, 2024
-
[15]
Estimating surface velocity coefficient from entropy theory for stiv discharge measurements
Ichiro Fujita, Yoshiro Omori, Ken Watanabe, Makiko Iguchi, Makoto Hasegawa, and Hideto Yoshimura. Estimating surface velocity coefficient from entropy theory for stiv discharge measurements. 1:17–35, 2024. doi: 10.11532/hydrometry.1.0_17_35
-
[16]
Yoshiro Omori, Hideto Yoshimura, Ichiro Fujita, and Ken Watanabe. Flood discharge measure- ment by stiv coupled with maximum entropy method using parameter estimation by numerical analysis.KSCE Journal of Civil Engineering, 28(3):1122–1131, 2024. ISSN 1226-7988. doi: https://doi.org/10.1007/s12205-024-1458-9. URL https://www.sciencedirect.com/ science/art...
-
[17]
Hideto YOSHIMURA and Ichiro FUJITA. Numerical simulation of free surface flow by a volume-of-fluid method using hierarchical cartesian grids.Journal of JSCE, 12(2):23–15041, 2024
work page 2024
-
[18]
ICHIRO FUJITA, TATSHUSHI SHIBANO, and KOJIRO TANI. Application of masked two- dimensional fourier spectrum for improving measurement accuracy of river surface flow. In E-proceedings of the 36th IAHR World Congress, 2019. 9
work page 2019
-
[19]
Jianping Wang, Yingbo Chen, Guangqiang Yao, and Neng Li. Adaptive river flow measure- ment method based on spatiotemporal image velocimetry and optical flow.Water Science & Technology, 89(4):1028–1046, 2024
work page 2024
-
[20]
Ken Watanabe, Ichiro Fujita, Makiko Iguchi, and Makoto Hasegawa. Improving accuracy and robustness of space-time image velocimetry (stiv) with deep learning.Water, 13(15):2079, 2021
work page 2079
-
[21]
Rafael Grompone V on Gioi, Jeremie Jakubowicz, Jean-Michel Morel, and Gregory Randall. Lsd: A fast line segment detector with a false detection control.IEEE transactions on pattern analysis and machine intelligence, 32(4):722–732, 2008
work page 2008
-
[22]
Deeplsd: Line segment detection and refinement with deep image gradients
Rémi Pautrat, Daniel Barath, Viktor Larsson, Martin R Oswald, and Marc Pollefeys. Deeplsd: Line segment detection and refinement with deep image gradients. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 17327–17336, 2023. 10
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.