Recognition: 2 theorem links
· Lean TheoremRadioactive Source Seeking using Bayesian Optimisation with Movement Penalty
Pith reviewed 2026-05-15 03:16 UTC · model grok-4.3
The pith
Bayesian optimisation with a movement penalty and heteroscedastic Gaussian process localises radioactive sources while achieving sublinear regret.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The proposed Bayesian optimisation strategy that employs a heteroscedastic Gaussian process surrogate and a movement switching cost generates sublinear regret in the source-seeking task and demonstrates effectiveness at localising radioactive sources in simulations.
What carries the argument
Heteroscedastic Gaussian process surrogate inside Bayesian optimisation, augmented by a movement switching cost that penalises inter-sample travel.
If this is right
- Robots require fewer radiation measurements to locate sources, lowering total exposure time.
- The movement penalty directly reduces excessive travel between sample points.
- Sublinear regret supplies a theoretical performance guarantee that improves with more samples.
- The method offers a practical alternative to gradient-based search in low-sample-efficiency settings.
Where Pith is reading between the lines
- The same movement-penalised formulation could be tested on other point-source localisation tasks such as chemical or acoustic detection.
- Real-robot deployments would reveal whether sensor latency and environmental dynamics violate the stable-noise assumption.
- The regret analysis might extend to other sequential decision problems that trade measurement cost against travel cost.
Load-bearing premise
The radiation intensity field can be modeled by a heteroscedastic Gaussian process whose noise structure remains stable enough for the regret bound to hold.
What would settle it
Observing linear or superlinear regret, or consistent failure to localise the source in simulations that use realistic radiation fields with varying noise, would disprove the central claim.
Figures



read the original abstract
The use of mobile robotics in radioactive source seeking has become an important part of modern radiation-safety practices, supporting timely mitigation of contamination risks and helping protect public health. However, measuring radiation is often time-consuming, rendering traditional gradient-based source-seeking methods less effective due to lower sample efficiency. This paper proposes a sample-efficient Bayesian-Optimisation source-seeking strategy that utilises a heteroscedastic Gaussian process surrogate to balance exploration and exploitation. Excessive inter-sample travel is discouraged through a movement switching cost. The strategy is shown to generate sublinear regret in the source-seeking task, while simulations demonstrate its effectiveness in localising radioactive sources.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a Bayesian optimisation strategy for radioactive source seeking that employs a heteroscedastic Gaussian process surrogate to balance exploration and exploitation while incorporating a movement switching cost to penalise excessive inter-sample travel. It claims that this approach generates sublinear regret in the source-seeking task and demonstrates effectiveness through simulations for localising radioactive sources.
Significance. If the sublinear regret bound can be rigorously established under the heteroscedastic noise model and the simulations prove robust, the work could advance sample-efficient robotic methods for radiation monitoring, addressing the practical limitations of time-consuming measurements where gradient-based approaches are inefficient. The integration of movement penalties with BO offers a promising direction for real-world deployment in radiation safety.
major comments (2)
- [Abstract / Regret analysis] Abstract and theoretical section: The sublinear regret claim rests on information-gain bounds for the heteroscedastic GP, but no derivation is provided showing how the intensity-dependent variance remains compatible with standard GP regret analyses (e.g., those requiring bounded or sublinear information gain). Radioactive counts are Poisson-distributed, which can produce stronger intensity dependence than typical heteroscedastic GP assumptions allow; this needs explicit verification or a counter-example test to support the central claim.
- [Simulations] Simulation results section: The reported effectiveness lacks error bars, details on run counts, data exclusion criteria, or statistical tests comparing against baselines, making it impossible to assess whether the localisation improvements are significant or reproducible under the claimed noise model.
minor comments (1)
- [Abstract] The abstract refers to 'sublinear regret' without defining the precise cumulative cost (including movement penalty) or stating the kernel and noise assumptions under which the bound holds.
Simulated Author's Rebuttal
We thank the referee for their constructive comments, which highlight important areas for strengthening the theoretical justification and empirical validation of our Bayesian optimization approach for radioactive source seeking. We address each major comment below and will incorporate revisions to improve the manuscript.
read point-by-point responses
-
Referee: [Abstract / Regret analysis] The sublinear regret claim rests on information-gain bounds for the heteroscedastic GP, but no derivation is provided showing how the intensity-dependent variance remains compatible with standard GP regret analyses. Radioactive counts are Poisson-distributed, which can produce stronger intensity dependence than typical heteroscedastic GP assumptions allow; this needs explicit verification.
Authors: We acknowledge that the manuscript does not include an explicit derivation of the regret bound under the heteroscedastic model. In the revision, we will add an appendix deriving the information-gain bound for the heteroscedastic GP surrogate, demonstrating that the Poisson-induced variance remains compatible with sublinear regret by establishing an upper bound on the variance growth that preserves the standard assumptions from Srinivas et al. (2010) and related heteroscedastic BO analyses. We will also include a short discussion and a simple numerical verification showing that the intensity dependence does not violate the required sublinear information gain condition. revision: yes
-
Referee: [Simulations] The reported effectiveness lacks error bars, details on run counts, data exclusion criteria, or statistical tests comparing against baselines, making it impossible to assess whether the localisation improvements are significant or reproducible under the claimed noise model.
Authors: We agree that the simulation results section requires more rigorous statistical reporting. In the revised version, we will add error bars (standard deviation over 50 independent trials), explicitly state the number of runs, confirm that no data were excluded, and include statistical comparisons (e.g., Wilcoxon signed-rank tests) against the baseline methods to demonstrate significance of the observed improvements under the Poisson noise model. revision: yes
Circularity Check
No circularity: regret bound presented as independent theoretical result
full rationale
The abstract states the strategy generates sublinear regret without providing equations or derivations that reduce this claim to a fitted parameter, self-definition, or self-citation chain. No load-bearing step is shown to be equivalent to its inputs by construction. The result is framed as following from standard GP-BO information-gain arguments under the stated heteroscedastic noise model, which is treated as an external assumption rather than derived within the paper. This is the most common honest finding for theoretical regret claims when no explicit reduction is exhibited.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Radiation field can be modeled as a heteroscedastic Gaussian process
- domain assumption Movement switching cost discourages excessive travel without invalidating the regret bound
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
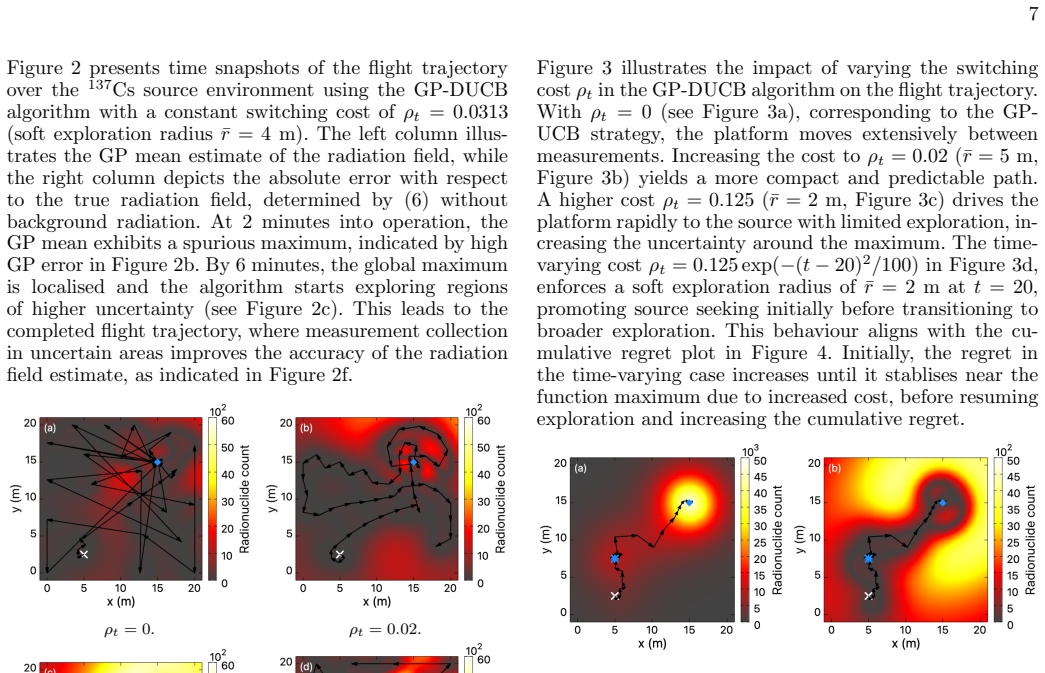
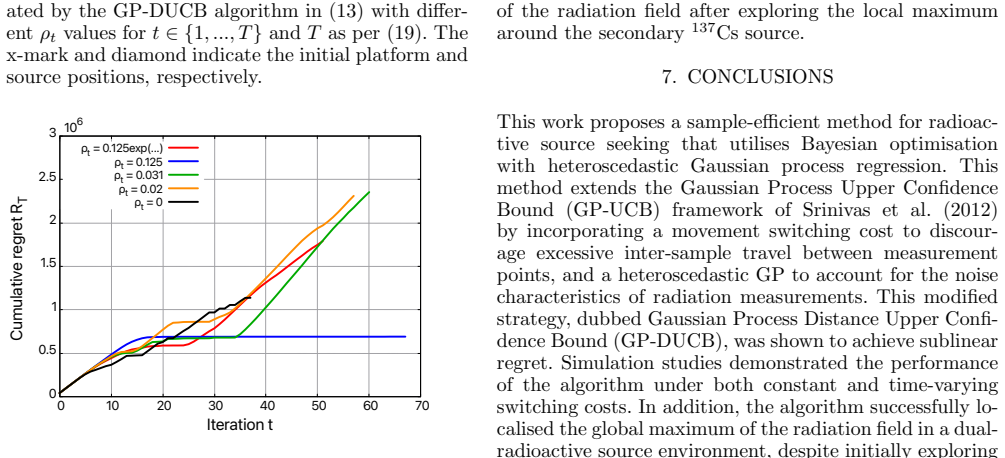
The strategy is shown to generate sublinear regret in the source-seeking task... GP-DUCB strategy in (13)... cumulative regret RT ... bounded by a sublinear function of T
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
heteroscedastic Gaussian process surrogate... σ²(x) = τλϕ̂(x) + τb
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Extremum seeking with stochastic perturbations , author=. IEEE Trans. Autom. Control , volume=. 2009 , publisher=
work page 2009
-
[2]
Performance improvement and limitations in extremum seeking control , journal =
Miroslav Krstić , keywords =. Performance improvement and limitations in extremum seeking control , journal =. 2000 , issn =
work page 2000
-
[3]
Atanasov, Nikolay and Le Ny, Jerome and Michael, Nathan and Pappas, George J. , booktitle=. Stochastic source seeking in complex environments , year=
-
[4]
Radioactive capsule in
-
[5]
Niranjan Srinivas and Andreas Krause and Sham M. Kakade and Matthias W. Seeger , issn =. Information-Theoretic Regret Bounds for Gaussian Process Optimization in the Bandit Setting , volume =. IEEE Trans. Inf. Theory , keywords =
-
[6]
Joshi and Ryan Pavlovsky and Brian J
Kai Vetter and Ross Barnowksi and Andrew Haefner and Tenzing H.Y. Joshi and Ryan Pavlovsky and Brian J. Quiter , issn =. Gamma-Ray imaging for nuclear security and safety: Towards 3-D gamma-ray vision , volume =. NIMA , keywords =
-
[7]
Paulo R. Silveira and Danilo de F. Naiff and Claudio M.N.A. Pereira and Roberto Schirru , issn =. Reconstruction of radiation dose rate profiles by autonomous robot with active learning and Gaussian process regression , volume =. Ann. Nucl. Energy , keywords =
-
[8]
Bassam A. Khuwaileh and Walid A. Metwally , issn =. Gaussian process approach for dose mapping in radiation fields , volume =. NET , keywords =
-
[9]
3D Radiation Mapping Using Gaussian Process Regression with Intensity Projection , volume =
Jihoon Jung and Donggil You and Kooksun Lee and Junghyun Oh , issn =. 3D Radiation Mapping Using Gaussian Process Regression with Intensity Projection , volume =. Adv. Intell. Syst. , keywords =
-
[10]
Joyce and Barry Lennox , issn =
Andrew West and Ioannis Tsitsimpelis and Mauro Licata and Anz̆e Jazbec and Luka Snoj and Malcolm J. Joyce and Barry Lennox , issn =. Use of Gaussian process regression for radiation mapping of a nuclear reactor with a mobile robot , volume =. Scientific Reports , pages =
-
[11]
NaIL datasheet , year =
-
[12]
Radiation Detection and Measurement , year =
Glenn Knoll , edition =. Radiation Detection and Measurement , year =
-
[13]
Connor and Kieran Wood and Peter G
Dean T. Connor and Kieran Wood and Peter G. Martin and Sevda Goren and David Megson-Smith and Yannick Verbelen and Igor Chyzhevskyi and Serhii Kirieiev and Nick T. Smith and Tom Richardson and Thomas B. Scott , issn =. Radiological Mapping of Post-Disaster Nuclear Environments Using Fixed-Wing Unmanned Aerial Systems: A Study From Chornobyl , volume =. Fr...
-
[14]
An Online Algorithm for Smoothed Regression and LQR Control , author =. AISTATS , pages =. 2019 , volume =
work page 2019
-
[15]
Cora and Nando de Freitas , title =
Eric Brochu and Vlad M. Cora and Nando de Freitas , title =
-
[16]
Bayesian optimisation for Intelligent Environmental Monitoring , year =
Roman Marchant and Fabio Ramos , isbn =. Bayesian optimisation for Intelligent Environmental Monitoring , year =. IROS , pages =
-
[17]
Lysander Miller and Airlie Chapman and James Kennedy and Richard Hebden and Jeremy M. C. Brown , journal=. Development and Flight Trial of a UAV-based Gamma Ray and Neutron Detection System for Large-Area Radioactivity Mapping and Source Activity Estimation , year =
-
[18]
Gaussian Processes for Machine Learning , year =
Carl E.\ Rasmussen and Christopher K.\ I.\ Williams , isbn =. Gaussian Processes for Machine Learning , year =
-
[19]
Yukihisa Sanada and Tatsuo Torii , issn =. Aerial radiation monitoring around the Fukushima Dai-ichi nuclear power plant using an unmanned helicopter , volume =. J. Environ. Radioact. , keywords =
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.