Distributed 3D Leader-Follower Formation Control with Field-of-View Safety via Control Barrier Functions
Pith reviewed 2026-05-19 22:26 UTC · model grok-4.3
The pith
Control barrier functions enforce field-of-view safety in 3D leader-follower UAV formations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
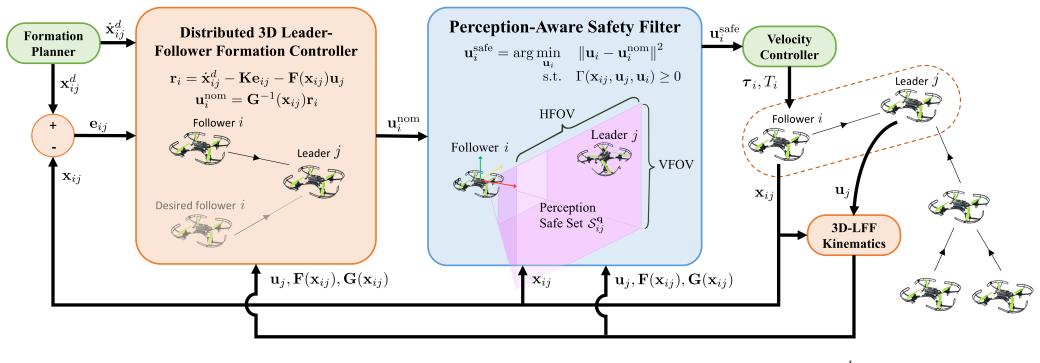
The central claim is that embedding a nominal 3D leader-follower formation tracking controller into a Control Barrier Function-based Quadratic Program safety filter minimally modifies the commanded velocities to maintain the leader inside the follower's camera frustum while preserving formation tracking whenever feasible. This architecture is derived from a relative kinematic model in line-of-sight coordinates and validated through Gazebo simulations and Crazyflie hardware experiments showing accurate tracking and effective FOV enforcement even when nominal commands conflict with visibility.
What carries the argument
The Control Barrier Function-based Quadratic Program (CBF-QP) safety filter, which takes the nominal formation velocity commands and finds the closest safe velocities that satisfy the field-of-view constraint.
If this is right
- The leader stays visible to the follower at all times under the safety filter.
- Formation tracking performance is preserved as long as the visibility constraint allows.
- The method works in distributed fashion using only relative states.
- Hardware experiments on Crazyflie drones confirm the approach in real conditions.
Where Pith is reading between the lines
- This method could be combined with other safety constraints like collision avoidance for more complex swarm behaviors.
- Extensions to non-holonomic vehicles or different sensor models might require adjusted barrier functions.
- Guaranteeing feasibility of the QP under all operating conditions would allow fully reliable deployment without fallback strategies.
Load-bearing premise
The control barrier function quadratic program always admits a feasible solution at each time step under the conditions of the formation task.
What would settle it
A scenario or simulation where the desired formation geometry and velocities make it impossible for any velocity adjustment to keep the leader in the camera frustum, leading to either visibility loss or controller failure.
Figures






read the original abstract
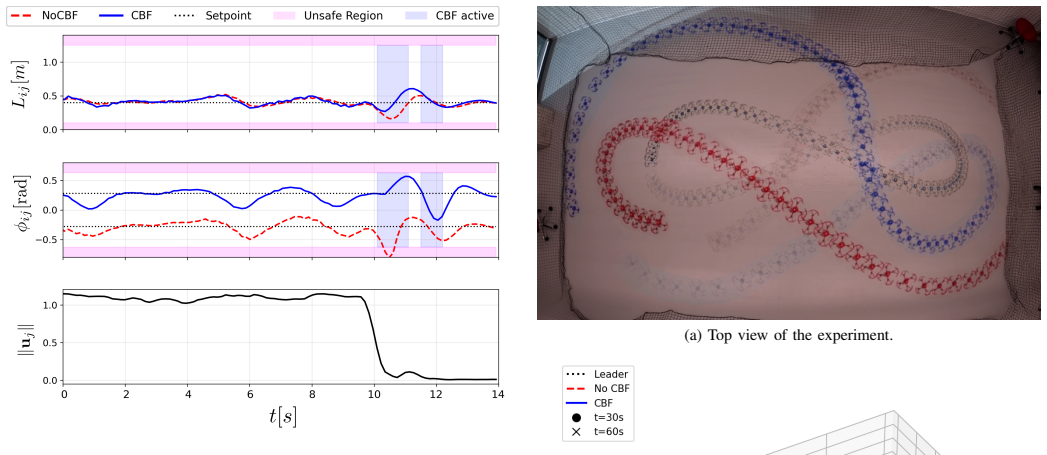
This letter proposes a distributed 3D leader-follower formation (3D-LFF) control framework for multi-UAV systems that achieves formation tracking while enforcing perception safety constraints. Maintaining safe, vision-based 3D-LFF is challenging because onboard cameras impose strict Field-of-View (FOV) limitations, and demanding formation commands can drive the leader outside the follower's camera frustum, resulting in loss of visibility. To address this issue, we develop a perception-aware safe control architecture that guarantees visibility by construction. First, we derive a relative kinematic model in a line-of-sight coordinate representation and design a distributed 3D-LFF tracking controller using only locally available relative states. Next, we embed the nominal formation controller within a Control Barrier Function-based Quadratic Program (CBF-QP) safety filter that minimally modifies the commanded velocities to maintain the leader inside the follower's camera frustum while preserving formation tracking whenever feasible. Gazebo simulations and Crazyflie hardware experiments validate the proposed approach, demonstrating accurate formation tracking and effective FOV enforcement, including scenarios in which the nominal desired formation conflicts with visibility constraints.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a distributed 3D leader-follower formation (3D-LFF) control framework for multi-UAV systems. It derives a relative kinematic model in line-of-sight coordinates, designs a nominal distributed formation tracking controller using local relative states, and embeds this controller in a CBF-QP safety filter that minimally modifies commanded velocities to enforce a field-of-view (FOV) constraint keeping the leader inside the follower's camera frustum. The approach is claimed to guarantee visibility by construction while preserving formation tracking whenever feasible, and is validated via Gazebo simulations and Crazyflie hardware experiments including conflict scenarios.
Significance. If the QP feasibility analysis and experimental verification are strengthened, the work offers a practical perception-aware safety filter for vision-based UAV formations that combines standard CBF theory with distributed formation control. This addresses a relevant engineering gap where demanding formation commands can violate onboard camera constraints.
major comments (1)
- [Abstract and §4] Abstract and §4 (Safety Filter Design): the central guarantee of visibility 'by construction' is qualified by 'whenever feasible,' yet the manuscript supplies neither a proof that the feasible set of the CBF-QP is non-empty for the closed-loop relative dynamics under the tested formation commands nor empirical verification (solver status flags, minimum constraint margins, or infeasibility counts) from the Gazebo and Crazyflie experiments.
minor comments (2)
- [Experiments] Experiments section: validation is described only qualitatively; quantitative metrics (e.g., RMS formation tracking error, percentage of time the FOV constraint is active, or histograms of QP slack variables) with error bars or statistical summaries across trials are absent.
- [§3] Notation and §3 (Relative Kinematics): the precise definition of the FOV barrier function h(x) derived from the line-of-sight angles and the choice of class-K function in the CBF inequality should be stated explicitly with the corresponding equation numbers.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the major comment below.
read point-by-point responses
-
Referee: [Abstract and §4] Abstract and §4 (Safety Filter Design): the central guarantee of visibility 'by construction' is qualified by 'whenever feasible,' yet the manuscript supplies neither a proof that the feasible set of the CBF-QP is non-empty for the closed-loop relative dynamics under the tested formation commands nor empirical verification (solver status flags, minimum constraint margins, or infeasibility counts) from the Gazebo and Crazyflie experiments.
Authors: We agree that the manuscript does not contain a formal proof that the CBF-QP feasible set remains non-empty under the closed-loop relative dynamics for the tested formation commands; deriving such a guarantee for the nonlinear distributed system is non-trivial. We will revise the manuscript to add empirical verification using data from the Gazebo simulations and Crazyflie experiments. This will include QP solver feasibility status, time histories of the minimum CBF value h(x), and confirmation of zero infeasibility events in the reported trials. The abstract and Section 4 will be updated to clarify that the visibility guarantee holds subject to QP feasibility, which is supported empirically for the presented scenarios. revision: partial
- Formal proof that the CBF-QP feasible set is non-empty for the closed-loop relative dynamics under the tested formation commands
Circularity Check
No circularity; derivation uses standard CBF-QP on relative kinematics
full rationale
The paper derives a relative kinematic model in line-of-sight coordinates, designs a distributed nominal 3D-LFF tracking controller from locally available states, and then embeds that controller inside a standard CBF-QP safety filter whose barrier function enforces the FOV constraint. None of these steps reduce the claimed visibility guarantee to a fitted parameter, a self-referential definition, or a load-bearing self-citation whose validity depends on the present work. The 'whenever feasible' qualifier is an explicit acknowledgment of QP feasibility rather than a hidden circular assumption. The overall architecture therefore remains self-contained against external CBF theory and does not exhibit any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
free parameters (2)
- CBF gain and class-K function parameters
- QP weighting matrices
axioms (2)
- domain assumption The relative kinematic model in line-of-sight coordinates is accurate and the only states needed for control are locally measurable.
- ad hoc to paper The quadratic program is feasible whenever the nominal formation command would violate the FOV constraint.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
embed the nominal formation controller within a Control Barrier Function-based Quadratic Program (CBF-QP) safety filter that minimally modifies the commanded velocities to maintain the leader inside the follower's camera frustum
-
IndisputableMonolith/Foundation/AlphaCoordinateFixation.leanalpha_pin_under_high_calibration unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Definition 1 (Control Barrier Function). A continuously differentiable function h is a valid CBF ... sup_u [nabla h^T (f + g u) + kappa(h)] >= 0
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
T. A. Tamba, I. R. Santjoko, Y . Y . Nazaruddin, and V . Nadhira, “An event-triggered multi-aav coordination scheme for simultaneous tracking and pursuit of multiple moving targets,”IEEE Access, vol. 13, pp. 171926–171941, 2025
work page 2025
-
[2]
Large-scale autonomous flight with real-time semantic slam under dense forest canopy,
X. Liu, G. V . Nardari, F. Cladera, Y . Tao, A. Zhou, T. Donnelly, C. Qu, S. W. Chen, R. A. Romero, C. J. Taylor,et al., “Large-scale autonomous flight with real-time semantic slam under dense forest canopy,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 5512–5519, 2022
work page 2022
-
[3]
L. Sun and B. Hu, “Event-triggering in three-dimensional leader- follower formation control for unmanned aerial vehicles,” inDynamic Systems and Control Conference, vol. 50701, p. V002T23A005, Amer- ican Society of Mechanical Engineers, 2016
work page 2016
-
[4]
L. Sun, B. Hu, and S. Zhao, “An event-triggering-based approach for three-dimensional local-level frame formation control of leader-follower uavs,” in2017 International Conference on Unmanned Aircraft Systems (ICUAS), pp. 472–479, IEEE, 2017
work page 2017
-
[5]
Vision-based follow- the-leader,
N. Cowan, O. Shakerina, R. Vidal, and S. Sastry, “Vision-based follow- the-leader,” inProceedings 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003)(Cat. No. 03CH37453), vol. 2, pp. 1796–1801, IEEE, 2003
work page 2003
-
[6]
Cooperative visibility maintenance for leader–follower formations in obstacle environments,
D. Panagou and V . Kumar, “Cooperative visibility maintenance for leader–follower formations in obstacle environments,”IEEE Transac- tions on Robotics, vol. 30, no. 4, pp. 831–844, 2014. 7
work page 2014
-
[7]
V . Walter, N. Staub, A. Franchi, and M. Saska, “Uvdar system for visual relative localization with application to leader–follower formations of multirotor uavs,”IEEE Robotics and Automation Letters, vol. 4, no. 3, pp. 2637–2644, 2019
work page 2019
-
[8]
Visual collaboration leader-follower UA V-formation for indoor exploration,
N. Evangeliou, D. Chaikalis, A. Tsoukalas, and A. Tzes, “Visual collaboration leader-follower UA V-formation for indoor exploration,” Frontiers in Robotics and AI, vol. V olume 8 - 2021, 2022
work page 2021
-
[9]
Vision-based formation control of quadrotors using a bearing-only approach,
D. L. Ram ´ırez-Parada, H. M. Becerra, C. A. Toro-Arcila, and G. Arechavaleta, “Vision-based formation control of quadrotors using a bearing-only approach,”Robotics, vol. 13, no. 8, p. 115, 2024
work page 2024
-
[10]
Constrained image- based visual servoing using barrier functions,
I. Salehi, G. Rotithor, R. Saltus, and A. P. Dani, “Constrained image- based visual servoing using barrier functions,” in2021 IEEE interna- tional conference on robotics and automation (ICRA), pp. 14254–14260, IEEE, 2021
work page 2021
-
[11]
A bearing-angle approach for unknown target motion analysis based on visual measure- ments,
Z. Ning, Y . Zhang, J. Li, Z. Chen, and S. Zhao, “A bearing-angle approach for unknown target motion analysis based on visual measure- ments,”The International Journal of Robotics Research, vol. 43, no. 8, pp. 1228–1249, 2024
work page 2024
-
[12]
S. Heshmati-Alamdari, M. Sharifi, G. C. Karras, and G. K. Fourlas, “Control barrier function based visual servoing for mobile manipulator systems under functional limitations,”Robotics and Autonomous Sys- tems, vol. 182, p. 104813, 2024
work page 2024
-
[13]
C. Hu and J. Wang, “Trust-based and individualizable adaptive cruise control using control barrier function approach with prescribed per- formance,”IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 7, pp. 6974–6984, 2021
work page 2021
-
[14]
Gcbf+: A neural graph control barrier function framework for distributed safe multi-agent control,
S. Zhang, O. So, K. Garg, and C. Fan, “Gcbf+: A neural graph control barrier function framework for distributed safe multi-agent control,” IEEE Transactions on Robotics, 2025
work page 2025
-
[15]
Safety-aware perception for au- tonomous collision avoidance in dynamic environments,
R. M. Bena, C. Zhao, and Q. Nguyen, “Safety-aware perception for au- tonomous collision avoidance in dynamic environments,”IEEE Robotics and Automation Letters, vol. 8, no. 12, pp. 7962–7969, 2023
work page 2023
-
[16]
T. Kim and D. Panagou, “Visibility-aware rrt* for safety-critical nav- igation of perception-limited robots in unknown environments,”IEEE Robotics and Automation Letters, 2025
work page 2025
-
[17]
A control barrier function candidate for quadrotors with limited field of view,
B. Trimarchi, F. Schiano, and R. Tron, “A control barrier function candidate for quadrotors with limited field of view,” in2025 American Control Conference (ACC), pp. 251–258, IEEE, 2025
work page 2025
-
[18]
Dis- tributed perception aware safe leader follower system via control barrier methods,
R. R. Suganda, T. Tran, M. Pan, L. Fan, Q. Lin, and B. Hu, “Dis- tributed perception aware safe leader follower system via control barrier methods,” in2025 IEEE International Conference on Robotics and Automation (ICRA), pp. 7794–7800, IEEE, 2025
work page 2025
-
[19]
Formation-aware adaptive conformalized perception for safe leader-follower multi-robot systems,
R. R. Suganda and B. Hu, “Formation-aware adaptive conformalized perception for safe leader-follower multi-robot systems,”arXiv preprint arXiv:2603.08958, 2026
-
[20]
Distributed implementation of con- trol barrier functions for multi-agent systems,
X. Tan and D. V . Dimarogonas, “Distributed implementation of con- trol barrier functions for multi-agent systems,”IEEE Control Systems Letters, vol. 6, pp. 1879–1884, 2021
work page 2021
-
[21]
Neural graph control barrier functions guided distributed collision-avoidance multi-agent control,
S. Zhang, K. Garg, and C. Fan, “Neural graph control barrier functions guided distributed collision-avoidance multi-agent control,” inConfer- ence on robot learning, pp. 2373–2392, PMLR, 2023
work page 2023
-
[22]
Control barrier function based quadratic programs for safety critical systems,
A. D. Ames, X. Xu, J. W. Grizzle, and P. Tabuada, “Control barrier function based quadratic programs for safety critical systems,”IEEE Transactions on Automatic Control, vol. 62, no. 8, pp. 3861–3876, 2016
work page 2016
-
[23]
Learning for layered safety-critical control with predictive control barrier functions,
W. D. Compton, M. H. Cohen, and A. D. Ames, “Learning for layered safety-critical control with predictive control barrier functions,”arXiv preprint arXiv:2412.04658, 2024
-
[24]
Crazysim: A software-in-the-loop simulator for the crazyflie nano quadrotor,
C. Llanes, Z. Kakish, K. Williams, and S. Coogan, “Crazysim: A software-in-the-loop simulator for the crazyflie nano quadrotor,” in2024 IEEE International Conference on Robotics and Automation (ICRA), pp. 12248–12254, 2024. APPENDIX Formulating the kinematics of the spherical states˙ x ij = [ ˙Lij, ˙ϕij, ˙ξij,˙αij]⊤ relies on determining the Cartesian rel...
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.