McLachlan-projected reduced dynamics for ill-posed Schr\"odingerized backward diffusion
Pith reviewed 2026-05-20 00:39 UTC · model grok-4.3
The pith
McLachlan projection onto a fixed low-dimensional frame supplies a structured regularizer for Schrödingerized backward diffusion with a gap bound set by the projection defect.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
McLachlan projection of the Schrödingerized generator onto a fixed low-dimensional frame supplies a structured regularizer for backward diffusion whose error budget is readable from the projection defect that separates full lifted propagation from the reduced trajectory.
What carries the argument
McLachlan projection onto the chosen low-dimensional frame, which defines the reduced dynamics and yields the lifted-reduced gap bound expressed in terms of the projection defect.
If this is right
- The reduced flow is unique.
- The Gram norm is conserved along the reduced trajectory.
- The lifted-reduced gap is bounded by the projection defect.
- Perturbation estimates show that statistical estimation of matrix elements is limited by overlap-matrix conditioning.
Where Pith is reading between the lines
- The same projection defect could be monitored in real time to decide when the frame needs refreshing.
- Because matrix elements are estimated with finite shots, the pipeline is compatible with quantum simulators that naturally produce Hermitian dynamics.
- Replacing the fixed frame by an adaptively updated one would likely tighten the defect bound in practice.
Load-bearing premise
The fixed low-dimensional frame captures enough of the lifted dynamics that the projection defect remains small enough to control the lifted-reduced gap throughout the backward evolution.
What would settle it
A numerical run in which the observed gap between the full lifted solution and the reduced trajectory exceeds the bound predicted by the measured projection defect for moderate noise levels would falsify the error-control claim.
Figures

read the original abstract
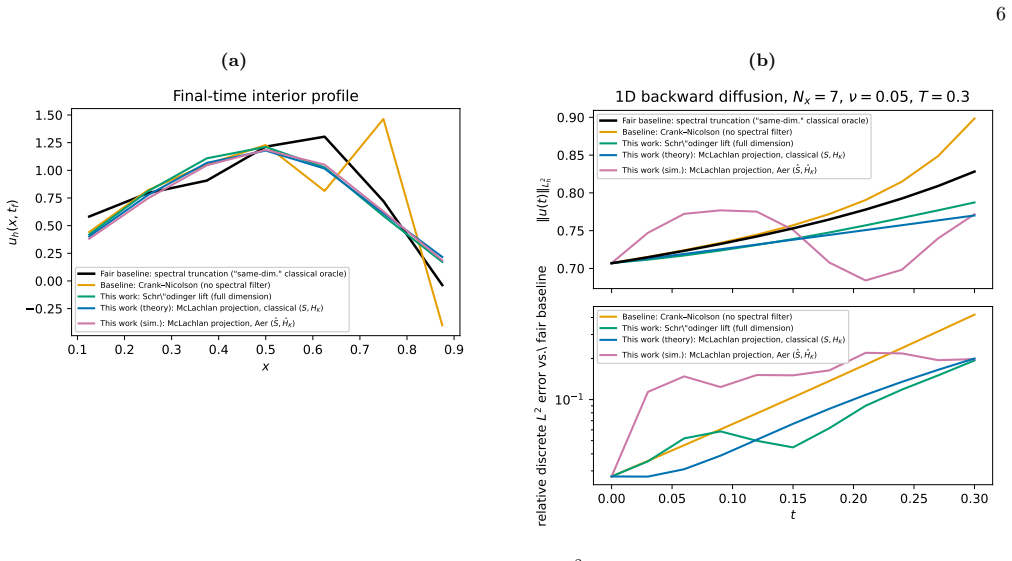
Backward diffusion is a prototype ill-posed evolution: high spatial frequencies grow exponentially in time, so mesh-based time marching without explicit regularization is quickly overwhelmed by noise. Schr\"odingerization embeds the semidiscrete generator into Hermitian dynamics on an extended space; we ask whether McLachlan projection onto a fixed low-dimensional frame supplies a structured regularizer whose error budget can be read from a projection defect that separates full lifted propagation from the reduced trajectory. We prove uniqueness of the reduced flow, Gram-norm conservation, a lifted--reduced gap bound in terms of that defect, and perturbation estimates that highlight overlap-matrix conditioning when matrix elements are estimated statistically. We also spell out a fair classical baseline -- spectral low-pass or Tikhonov filtering on the same semidiscrete model, with bandwidth or ridge strength matched to the information content of the chosen frame -- so numerical contrasts isolate the Schr\"odingerized reduced pipeline rather than an unregularized Crank--Nicolson march that mainly showcases blow-up. A calibrated one-dimensional benchmark pairs a spectrally truncated reference with snapshot-built subspace evolution and finite-shot Qiskit Aer estimation, illustrating how lift, projection, and sampling layers contribute differently to the overall error.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops a McLachlan projection onto a fixed low-dimensional frame to obtain reduced dynamics for the Schrödingerized formulation of backward diffusion. It claims to prove uniqueness of the reduced flow, conservation of the Gram norm, an explicit lifted-reduced gap bound controlled by the projection defect, and perturbation estimates that quantify the effect of statistical estimation of the overlap matrix. A 1D benchmark with snapshot-based subspace construction, finite-shot Qiskit simulation, and comparison against spectrally matched low-pass and Tikhonov baselines is presented to isolate the contribution of the Schrödingerized reduced pipeline.
Significance. If the gap bound remains non-vacuous, the framework supplies a structured, projection-based regularizer whose error can be diagnosed directly from the defect rather than from ad-hoc parameters. The explicit proofs of uniqueness and Gram-norm conservation, together with the fair classical baseline that matches information content to the chosen frame, constitute a clear methodological advance over unregularized time marching.
major comments (2)
- [§3.2, Eq. (12)] §3.2, Eq. (12): the lifted-reduced gap bound is stated in terms of the integrated projection defect, yet the manuscript provides no a priori estimate or numerical diagnostic showing that the fixed snapshot frame keeps this defect from growing exponentially under the Schrödingerized backward evolution; without such control the bound does not yet deliver a practical error guarantee for the original ill-posed problem.
- [§4.1] §4.1: the uniqueness proof for the reduced McLachlan flow relies on the invertibility of the Gram matrix formed from the chosen frame; the perturbation estimates in §4.3 quantify statistical noise but do not address whether the same frame remains linearly independent once high-frequency components are amplified by the backward Schrödingerized dynamics.
minor comments (2)
- The notation for the lifted versus reduced inner products is introduced without a dedicated table; a short comparison table would improve readability.
- Figure 3 caption should explicitly state the number of shots used for the Qiskit Aer estimates so that the sampling contribution can be compared directly with the projection-defect contribution.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. Below we provide point-by-point responses to the major comments and indicate the planned revisions.
read point-by-point responses
-
Referee: [§3.2, Eq. (12)] §3.2, Eq. (12): the lifted-reduced gap bound is stated in terms of the integrated projection defect, yet the manuscript provides no a priori estimate or numerical diagnostic showing that the fixed snapshot frame keeps this defect from growing exponentially under the Schrödingerized backward evolution; without such control the bound does not yet deliver a practical error guarantee for the original ill-posed problem.
Authors: We agree that a general a priori estimate preventing exponential growth of the projection defect would strengthen the theoretical guarantee. The manuscript expresses the lifted-reduced gap explicitly in terms of the integrated defect so that the error can be diagnosed from an observable quantity rather than hidden parameters. In the 1D benchmark the snapshot-constructed frame is taken from the reference solution, and the numerical results show that the defect remains controlled over the simulated interval, keeping the reduced trajectory stable. We will add a dedicated plot of the time-dependent projection defect together with a short discussion of its observed growth rate to make this diagnostic explicit. revision: yes
-
Referee: [§4.1] §4.1: the uniqueness proof for the reduced McLachlan flow relies on the invertibility of the Gram matrix formed from the chosen frame; the perturbation estimates in §4.3 quantify statistical noise but do not address whether the same frame remains linearly independent once high-frequency components are amplified by the backward Schrödingerized dynamics.
Authors: The frame is fixed by construction and does not evolve; its linear independence is therefore a static property of the chosen basis and is independent of any amplification of high-frequency modes that occurs in the full solution. Consequently the Gram matrix is time-independent, and the uniqueness result for the reduced McLachlan flow holds under the maintained assumption that this matrix remains invertible. The statistical perturbation estimates in §4.3 concern finite-shot estimation error in the overlap-matrix elements and are separate from the question of frame independence. We will insert a clarifying sentence in §4.1 stating that the frame is static and that its conditioning is unaffected by the backward dynamics. revision: partial
Circularity Check
Derivation chain is self-contained; no circular reductions identified
full rationale
The paper establishes uniqueness of the reduced McLachlan flow, Gram-norm conservation, and lifted-reduced gap bounds by direct appeal to the variational definition of McLachlan projection and the orthogonal decomposition that isolates the projection defect. These relations are algebraic identities derived from the inner-product structure on the lifted space and do not reduce to any fitted parameter, self-citation chain, or ansatz that is defined in terms of the target quantities. The defect is introduced as an independent diagnostic measuring the component of the vector field outside the chosen subspace; the gap bound is expressed in terms of this defect without tautological substitution. No load-bearing step invokes a uniqueness theorem or rescaling imported from prior work by the same authors, and the classical baseline comparison is constructed externally rather than from the same data used to select the frame. The central claims therefore remain independent of the specific numerical realization of the subspace.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption McLachlan projection onto a fixed subspace yields a unique reduced flow that conserves the Gram norm
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Theorem 1 (Projected coefficient dynamics): iSċ = HKc ... Corollary 1 (Gram-norm conservation) ... Theorem 2 (Recovered-state error ... δV(t))
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Assumption 1 (Lift–recovery realization) ... Schrödingerization embeds ... Hermitian dynamics
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
We fix the motivating PDE as semidiscretebackward diffusion (ill-posed forward-in-time evolution) and ∗ jeongbin033@yonsei.ac.kr explain why any mesh integrator must pair with an explicit regularizer; we specify classical spectral and Tikhonov filters that serve as fair baselines once their cutoff is matched to the frame dimensionm
-
[2]
We isolate post-lift reduced dynamics behind As- sumption 1, derive the McLachlan equationiS˙c= HKc, Gram conservation, and the lifted–reduced gap throughδ V (Theorem 2)
-
[3]
McLachlan-projected reduced dynamics for ill-posed Schr\"odingerized backward diffusion
We concatenate lift, projection, and sampled-pencil layers in Corollary 2 and quantify generator pertur- bations throughκ(S)(Proposition 1). We donotclaim that Schrödingerization removes ill- posedness in the recovered physical variable, nor that pro- jection supersedes optimal Tikhonov design. The point is methodological: projection error is an interpret...
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[4]
S. Jin, N. Liu, and Y. Yu, Quantum simulation of partial differential equations via schrödingerization, Phys. Rev. Lett.133, 230602 (2024)
work page 2024
-
[5]
S. Jin, N. Liu, and Y. Yu, Quantum simulation of partial 7 differential equations: Applications and detailed analysis, Phys. Rev. A108, 032603 (2023)
work page 2023
- [6]
-
[7]
S. Jin, X. Li, N. Liu, and Y. Yu, Quantum simulation for partial differential equations with physical boundary or interface conditions, J. Comput. Phys.498, 112707 (2024)
work page 2024
-
[8]
J. Hu, S. Jin, N. Liu, and L. Zhang, Quantum circuits for partial differential equations via schrödingerisation, Quantum8, 1563 (2024)
work page 2024
-
[9]
S. Jin, N. Liu, and C. Ma, On Schrödingerization-based quantum algorithms for linear dynamical systems with inhomogeneous terms, SIAM J. Numer. Anal.63, 1861 (2025)
work page 2025
-
[10]
S. Jin, N. Liu, and C. Ma, Schrödingerization based computationally stable algorithms for ill-posed problems in partial differential equations, SIAM J. Sci. Comput. 10.1137/24M1656116 (2025)
-
[11]
C. L. Cortes and S. K. Gray, Quantum Krylov subspace al- gorithms for ground- and excited-state energy estimation, Phys. Rev. A105, 022417 (2022)
work page 2022
- [12]
-
[13]
Y. Shen, K. Klymko, J. Sud, D. B. Williams-Young, W. A. de Jong, and N. M. Tubman, Real-time Krylov theory for quantum computing algorithms, Quantum7, 1066 (2023)
work page 2023
-
[14]
Sirovich, Turbulence and the dynamics of coherent structures
L. Sirovich, Turbulence and the dynamics of coherent structures. Part I: Coherent structures, Quart. Appl. Math.45, 561 (1987)
work page 1987
-
[15]
J. V. Beck, B. Blackwell, and C. R. St. Clair,Inverse Heat Conduction: Ill-Posed Problems(Wiley-Interscience, 1985)
work page 1985
-
[16]
H. W. Engl, M. Hanke, and A. Neubauer,Regularization of Inverse Problems(Springer, 1996)
work page 1996
-
[17]
A. N. Tikhonov and V. Y. Arsenin,Solutions of Ill-Posed Problems(V. H. Winston & Sons, 1977)
work page 1977
-
[18]
A. D. McLachlan, Variational solution of the time- dependent Schrödinger equation, Mol. Phys.8, 39 (1964)
work page 1964
-
[19]
P. C. Hansen,Discrete Inverse Problems: Insight and Algorithms, Fundamentals of Algorithms No. 7 (SIAM, Philadelphia, 2010)
work page 2010
-
[20]
V. A. Morozov,Methods for Solving Incorrectly Posed Problems(Springer, New York, 1984)
work page 1984
- [21]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.