Interaction-Breaking Adversarial Learning Framework for Robust Multi-Agent Reinforcement Learning
Pith reviewed 2026-05-20 12:19 UTC · model grok-4.3
The pith
Multi-agent reinforcement learning agents can be trained to keep coordinating when their observations and actions face adversarial perturbations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
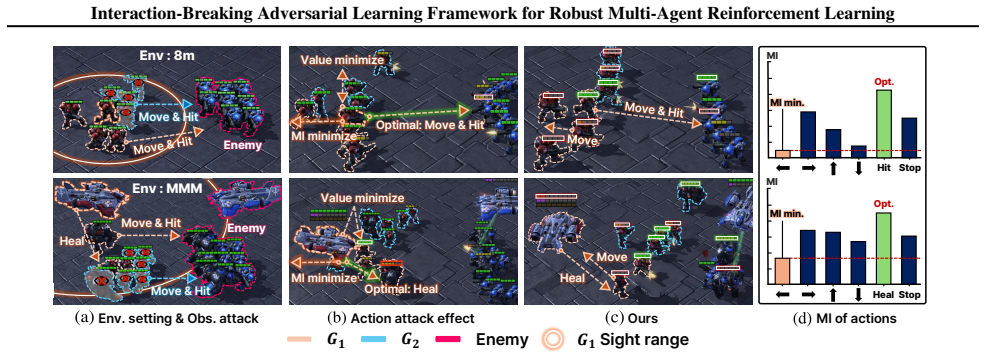
The central claim is that an interaction-breaking adversarial learning framework, built on an information-theoretic view of attacks, can generate perturbations to agents' observations and actions that specifically impede coordination, and that training agents against these perturbations produces policies that remain effective when real disruptions occur.
What carries the argument
The interaction-breaking adversarial learning (IBAL) framework that constructs attacks by perturbing agents' observations and actions to reduce shared information.
If this is right
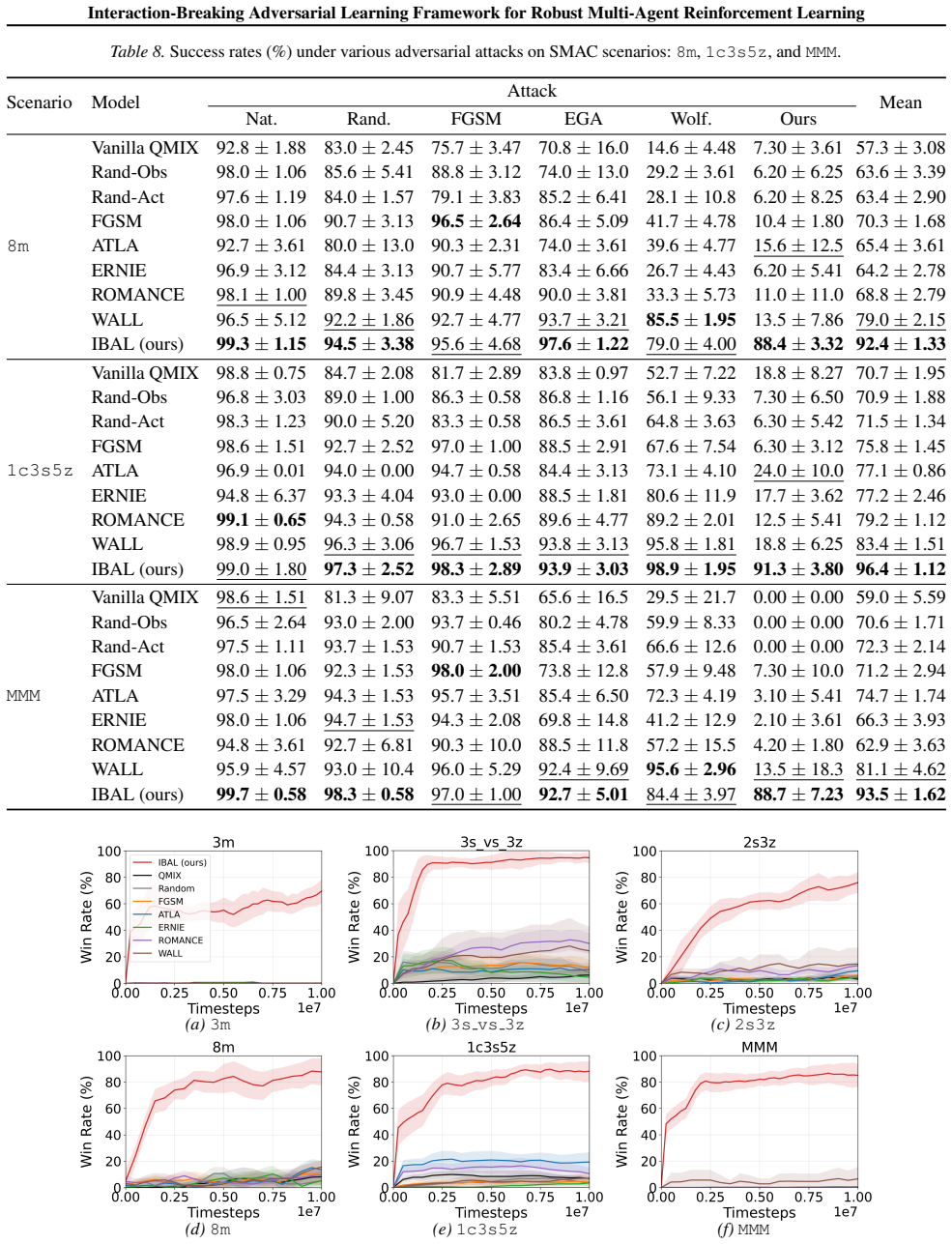
- The approach yields higher robustness than prior robust multi-agent reinforcement learning methods across varied attack types.
- Performance remains stronger in settings where some agents are missing.
- Robustness extends to corruption of interaction structures, not only to value-based attacks.
Where Pith is reading between the lines
- The same perturbation idea could be tested in single-agent tasks where environment changes mimic loss of useful signals.
- Different measures of information, such as mutual information variants, might produce stronger or weaker attacks worth comparing directly.
- Deployment in systems like vehicle fleets or robot teams would reveal whether the learned robustness transfers beyond simulated attacks.
Load-bearing premise
Perturbations chosen by information-theoretic measures on observations and actions serve as a good model for the interaction disruptions that actually occur in real multi-agent environments.
What would settle it
Measure whether agents trained under the proposed framework complete cooperative tasks at higher rates than baselines when placed in a physical testbed that introduces real sensor noise or intermittent communication loss.
Figures












read the original abstract
Cooperation is central to multi-agent reinforcement learning (MARL), yet learned coordination can be fragile when external perturbations disrupt inter-agent interactions. Prior robust MARL methods have primarily considered value-oriented attacks, leaving a gap in robustness when interaction structures themselves are corrupted. In this paper, we propose an interaction-breaking adversarial learning (IBAL) framework that takes an information-theoretic view to construct attacks that impede coordination by perturbing agents' observations and actions, and trains agents to perform reliably under such disruptions. Empirically, our approach improves robustness over existing robust MARL baselines across diverse attack settings and yields stronger performance even under agent-missing scenarios. Our code is available at https://sunwoolee0504.github.io/IBAL.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes an Interaction-Breaking Adversarial Learning (IBAL) framework for robust multi-agent reinforcement learning. It adopts an information-theoretic perspective to generate attacks that impede inter-agent coordination by perturbing agents' observations and actions, then trains policies to remain effective under these disruptions. The central empirical claim is that IBAL improves robustness over existing robust MARL baselines across diverse attack settings and yields stronger performance even in agent-missing scenarios.
Significance. If the empirical results hold and the information-theoretic perturbations prove representative of real coordination-breaking disruptions, the work would address a genuine gap in robust MARL by shifting focus from value-oriented attacks to interaction-structure corruption. This could be useful for applications such as multi-robot coordination where learned policies must tolerate partial observability or communication failures.
major comments (1)
- [Experiments] Experiments section: the manuscript reports robustness gains over baselines under its own attack family and agent-missing scenarios, yet contains no ablation that replaces the information-theoretic attack generator with an alternative disruption model (e.g., direct reward hacking or dynamics perturbation) while keeping the training procedure otherwise identical. Without this comparison, the reported improvements could be explained by the specific attack distribution rather than by a general interaction-breaking principle, which is load-bearing for the headline claim.
minor comments (1)
- [Abstract] Abstract: the claim of improvement 'across diverse attack settings' is stated without enumerating the settings or metrics, making it difficult for readers to gauge the breadth of the evaluation from the outset.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address the major comment point by point below.
read point-by-point responses
-
Referee: [Experiments] Experiments section: the manuscript reports robustness gains over baselines under its own attack family and agent-missing scenarios, yet contains no ablation that replaces the information-theoretic attack generator with an alternative disruption model (e.g., direct reward hacking or dynamics perturbation) while keeping the training procedure otherwise identical. Without this comparison, the reported improvements could be explained by the specific attack distribution rather than by a general interaction-breaking principle, which is load-bearing for the headline claim.
Authors: We appreciate the referee's observation. The information-theoretic attack generator is a defining component of the IBAL framework because it explicitly targets reductions in mutual information to disrupt coordination, which is distinct from value-oriented attacks studied in prior work. Our experiments already evaluate robustness under the proposed attack family as well as agent-missing scenarios, the latter of which constitutes an alternative form of interaction disruption. Nevertheless, we agree that an ablation replacing the attack generator with alternatives such as direct reward hacking or dynamics perturbation (while holding the remainder of the training procedure fixed) would help isolate the contribution of the interaction-breaking principle. We will add this comparison in the revised manuscript. revision: yes
Circularity Check
No circularity: framework and robustness claims are empirically grounded without self-referential reductions
full rationale
The paper introduces the IBAL framework as a novel information-theoretic method for constructing adversarial perturbations to observations and actions that impede inter-agent coordination, then demonstrates empirical robustness gains over baselines in multiple attack settings and agent-missing scenarios. No equations, fitted parameters, or self-citations are shown in the abstract or described structure that reduce the claimed improvements to a definition, renaming, or input by construction. The central premise relies on external empirical validation against existing robust MARL methods rather than internal loops or uniqueness theorems imported from prior author work. This qualifies as a self-contained proposal with independent content.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.