A regularization method for planar offset curves and bi-offset recognition
Pith reviewed 2026-05-20 00:29 UTC · model grok-4.3
The pith
Penalized Hermite splines regularize trajectories to produce bi-offset curves that best fit the original and reconstruct the center line from boundaries.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By first approximating trajectories with penalized Hermite splines that fit both positions and tangents under regularization on second derivatives, the method constructs offset curves through joint approximation of function values and derivatives. This leads to a bi-offset defined as the most fitting with the generator curve, where the offset range is related to pointwise curvature, enabling the adaptive reconstruction of the center line from external boundaries.
What carries the argument
The bi-offset model, obtained after penalized Hermite spline regularization of the generator curve and simultaneous approximation of values and derivatives to form the offsets, which then relates offset range to local curvature to recover the center line from boundaries.
Load-bearing premise
The first-stage penalized Hermite spline regression simultaneously fits positions and tangents while mitigating singularities and jerk sufficiently for the subsequent geometric offset construction to remain accurate and well-behaved without introducing new artifacts that would invalidate the bi-offset model.
What would settle it
A test case with a known exact generator curve and center line where the bi-offset reconstructed center line deviates from the original beyond the expected approximation error, or where the curvature-offset relation fails to predict the best fit, would falsify the model.
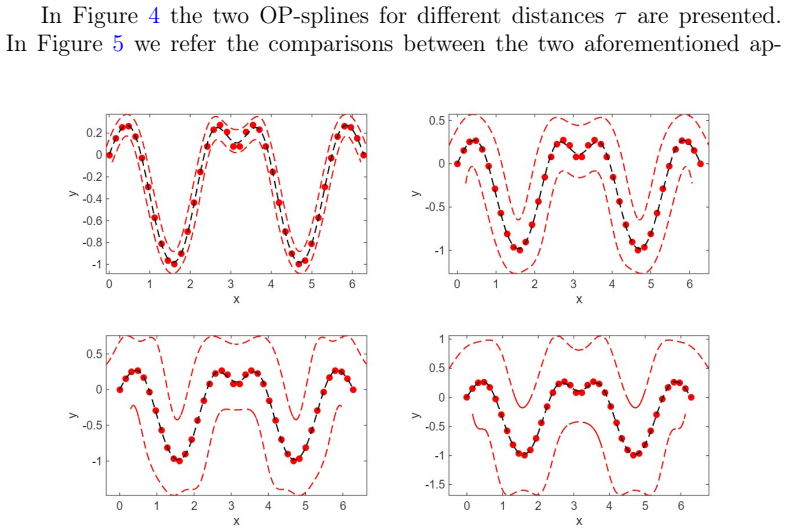
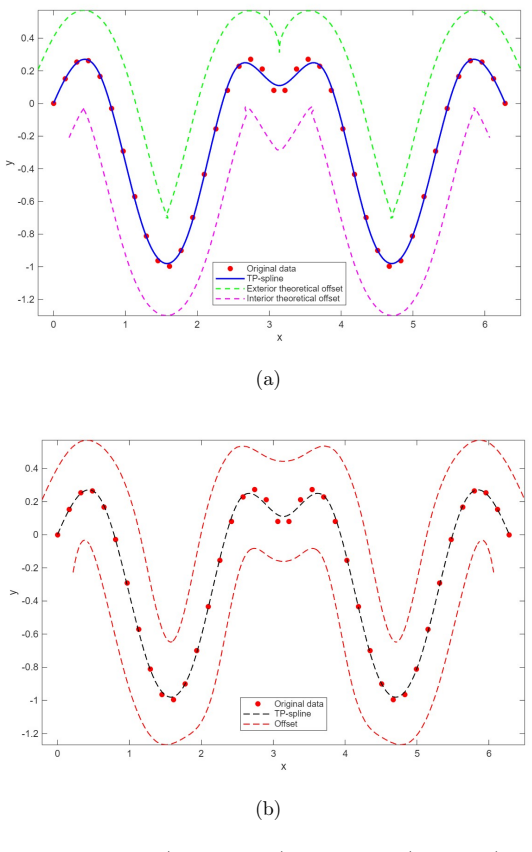
Figures


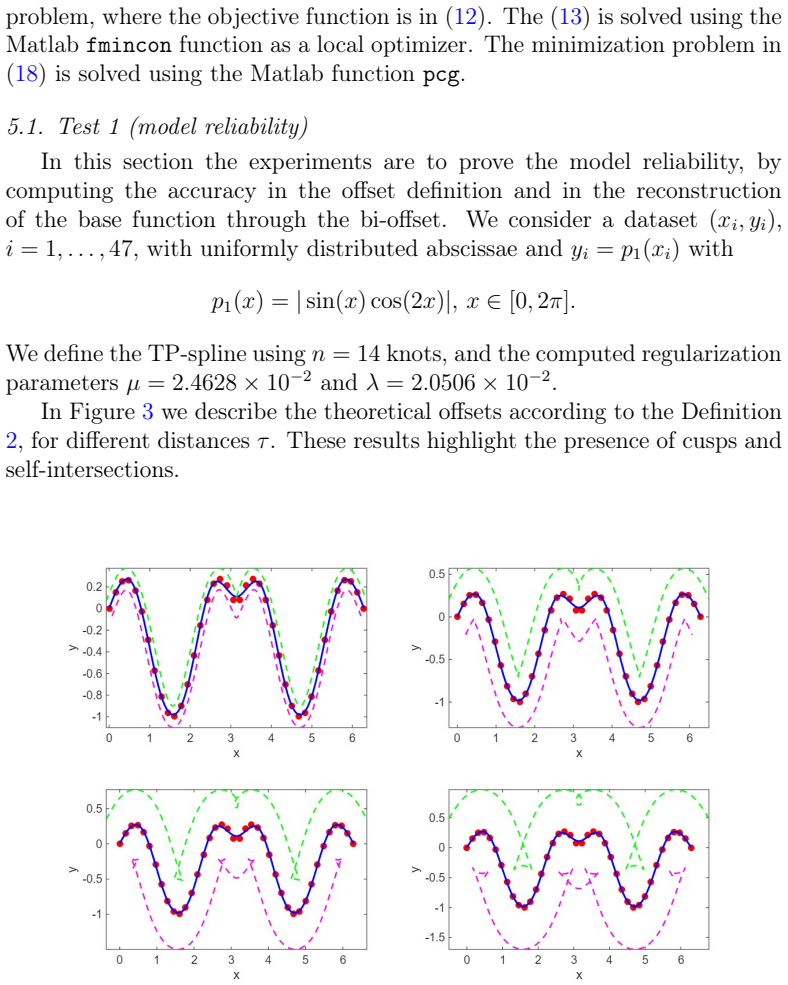


read the original abstract
Offset curves for planar trajectories are interesting in the generation of tool paths for numerically controlled industrial machines and in trajectory planning methods for autonomous driving systems. Theoretical offset curves may exhibit peculiar singularities, including self-intersections, which limit their use in practical applications. Existing approaches address these issue through geometric filtering techniques to detect and remove undesirable features but the computation of accurate and well-behaved offset curves remains a challenging task. We assume a first stage of functional approximation of trajectories by penalized Hermite spline regression enabling the simultaneous fitting of positions and tangents. The regularization is imposed on the second derivatives, effectively mitigating the jerk effect, which is particularly relevant in motion planning and path smoothing applications. Then, taking into account the geometrical pointwise properties of the resulting curve, we design two offset curves through the simultaneous approximation of function values and derivatives. Then, a mathematical model to obtain the so-called bi-offset as most fitting as with the original generator curve is proposed, also relating the offset range and pointwise curvature values. The adaptive reconstruction of the center line from the external boundaries is a topic of interest and is the main focus of our work. Numerical experiments confirm the reliability of our approach at every stage of the resolution process.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a two-stage method for generating regularized planar offset curves. Stage one performs penalized Hermite spline regression that simultaneously fits positions and first derivatives while penalizing second derivatives to control jerk. Stage two constructs inner and outer offset curves from the resulting spline using pointwise curvature, introduces a bi-offset model that relates offset distance to curvature values, and develops an adaptive procedure to reconstruct the center line from the pair of external boundaries. Numerical experiments are reported to support reliability at each stage.
Significance. If the derivations and experiments hold, the work offers a direct regularization route to singularity-free offsets that integrates spline approximation with geometric offset construction. This could be useful for CNC tool-path generation and autonomous-vehicle trajectory planning, where jerk control and center-line recovery from boundaries are recurring requirements. The explicit linkage between offset range and pointwise curvature in the bi-offset model is a potentially distinctive element.
major comments (2)
- [§4] §4 (bi-offset construction): the claim that the bi-offset is the 'most fitting' with the generator curve rests on a pointwise curvature relation; however, the manuscript does not appear to supply an error bound or stability estimate showing that the penalized spline's second-derivative control propagates to bounded curvature error in the offset step. Without this, it is unclear whether the subsequent center-line reconstruction remains accurate when the original curve has regions of high curvature variation.
- [§3.2] §3.2 (Hermite spline regression): the penalty term is stated to mitigate jerk while preserving tangent fitting, yet the numerical section does not report the condition number of the resulting linear system or the sensitivity of the offset curves to the single free penalty parameter. This leaves open whether the method is robust across different trajectory lengths or sampling densities.
minor comments (3)
- The abstract and introduction use 'bi-offset recognition' without a concise definition; a one-sentence statement of what quantity is being recognized would improve readability.
- [Table 1] Table 1 (numerical results): the reported maximum deviation values lack units or normalization relative to curve length; adding this information would make the reliability claims easier to interpret.
- [Figure 3] Figure 3 caption: the distinction between the reconstructed center line and the true medial axis is not stated; a brief clarification would prevent misinterpretation.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below and indicate the revisions we will make to strengthen the manuscript.
read point-by-point responses
-
Referee: [§4] §4 (bi-offset construction): the claim that the bi-offset is the 'most fitting' with the generator curve rests on a pointwise curvature relation; however, the manuscript does not appear to supply an error bound or stability estimate showing that the penalized spline's second-derivative control propagates to bounded curvature error in the offset step. Without this, it is unclear whether the subsequent center-line reconstruction remains accurate when the original curve has regions of high curvature variation.
Authors: We agree that the manuscript does not supply a formal error bound or stability estimate demonstrating how the second-derivative penalty propagates to bounded curvature error in the offset construction. The bi-offset is defined via the pointwise curvature relation to achieve geometric fidelity with the generator curve. Numerical experiments in the paper, including cases with high curvature variation, show that center-line reconstruction remains accurate in practice. In the revision we will add a brief remark in §4 linking the penalty term to implicit control of curvature variation through the spline smoothness, thereby supporting stability of the reconstruction. This is a partial revision. revision: partial
-
Referee: [§3.2] §3.2 (Hermite spline regression): the penalty term is stated to mitigate jerk while preserving tangent fitting, yet the numerical section does not report the condition number of the resulting linear system or the sensitivity of the offset curves to the single free penalty parameter. This leaves open whether the method is robust across different trajectory lengths or sampling densities.
Authors: We agree that the absence of condition-number reporting and sensitivity analysis leaves the robustness claim incompletely supported. The penalty is introduced precisely to control jerk while the Hermite conditions preserve tangent fitting. In the revised version we will augment the numerical section with explicit condition numbers of the linear system for representative penalty values and sampling densities, together with plots or tables illustrating the sensitivity of the resulting offset curves to the penalty parameter across trajectories of different lengths. These additions will be included in the next manuscript. revision: yes
Circularity Check
No significant circularity detected in derivation chain
full rationale
The paper describes a constructive two-stage procedure: penalized Hermite spline regression to fit positions and tangents while regularizing second derivatives, followed by geometric construction of offset curves that incorporate pointwise curvature to define a bi-offset model and adaptive center-line reconstruction. No equations or steps in the abstract reduce by construction to the inputs (e.g., no fitted parameter renamed as a prediction, no self-definition of the bi-offset via its own outputs, and no load-bearing self-citation chains). The method is presented as building on standard spline regression and geometric offset properties, with numerical experiments cited for validation rather than internal self-consistency loops. This is a normal non-circular engineering proposal.
Axiom & Free-Parameter Ledger
free parameters (1)
- penalty parameter for second derivatives
axioms (1)
- domain assumption Trajectories admit a functional approximation by penalized Hermite splines that simultaneously fits positions and tangents while preserving sufficient geometric properties for offset curve construction.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
penalized Hermite spline regression enabling the simultaneous fitting of positions and tangents. The regularization is imposed on the second derivatives, effectively mitigating the jerk effect... mathematical model to obtain the so-called bi-offset... relating the offset range and pointwise curvature values
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
offset curve generated by r ... ro(t) = r(t) + τ N(t) ... k = r'' · J r' / ||r'||^3 ... cusp when k(tc) = −1/τ
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
(2021) Penalized hyperbolic-polynomial splines,Applied Mathematics Letters, 118
Campagna, R., Conti, C. (2021) Penalized hyperbolic-polynomial splines,Applied Mathematics Letters, 118
work page 2021
-
[2]
(2025) A Hermite spline model for data regression,Mathematics and Computers in Simulation, 229, pp
Campagna, R., Cotronei, M., Fazzino, D. (2025) A Hermite spline model for data regression,Mathematics and Computers in Simulation, 229, pp. 222 - 234
work page 2025
-
[3]
Xuejuan Chen and Qun Lin. (2014) Properties of generalized offset curves and surfaces.Journal of Applied Mathematics, 2014:124240
work page 2014
-
[4]
Eilers Paul H.C. and Marx Brian D. (1986) Flexible smoothing with b-splines and penalties.Statistical Science, Vol. 11, No. 2, 89-121
work page 1986
-
[5]
Farouki, R.T. and Neff, C.A. (1990) Analytic properties of plane offset curves.Computer Aided Geometric Design, 7(1):83–99
work page 1990
-
[6]
Farouki, R.T. and Neff, C.A. (1990) Algebraic properties of plane offset curves.Computer Aided Geometric Design, 7(1):101–127
work page 1990
-
[7]
Gray, A., Abbena, E. and Salamon S. (2006) Modern differential geom- etry of curves and surfaces with mathematica,Chapman & Hall/CRC
work page 2006
-
[8]
Hoschek, J (1985) Offset curves in the plane.Computer-Aided Design, Vol. 17, Issue 2, 77-82
work page 1985
-
[9]
Hoschek, J (1987) Approximate conversion of spline curves.Computer Aided Geometric Design, 4(1):59–66
work page 1987
-
[10]
Hoschek, J (1988) Spline approximation of offset curves.Computer Aided Geometric Design, Vol. 5, Issue 1, 33-40
work page 1988
-
[11]
Hoschek, J (1988) Intrinsic parametrization for approximation.Com- puter Aided Geometric Design, 5(1):27–31. 25
work page 1988
-
[12]
Xuemin Hu, Long Chen, Bo Tang, Dongpu Cao, and Haibo He (2018) Dynamic path planning for autonomous driving on various roads with avoidanceofstaticandmovingobstacles.Mechanical Systems and Signal Processing, 100:482–500
work page 2018
-
[13]
Young Joon Ahn (2023) Hermite interpolation of offset curves of para- metric regular curves.AIMS Mathematics, 8(12): 31008-31021
work page 2023
-
[14]
Bai Li, Yakun Ouyang, Li Li, and Youmin Zhang (2022) Autonomous driving on curvy roads without reliance on Frenet frame: A cartesian- based trajectory planning method.IEEE Transactions on Intelligent Transportation Systems, 23(9):15729–15741
work page 2022
-
[15]
Zhao, H., Zhou, L. (2017)A Novel Method of Offset Approxima- tion along the Normal Direction with High Precision, Mathematical and Computational Applications, 22(3), 39. 26
work page 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.