Data-Driven Dynamic Modeling of a Tendon-Actuated Continuum Robot
Pith reviewed 2026-05-20 09:45 UTC · model grok-4.3
The pith
A two-degree-of-freedom model accurately captures the dynamics of a high-joint tendon-actuated continuum robot.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that experimental analysis reveals a two-degree-of-freedom dynamic model can accurately capture the system dynamics of the tendon-actuated continuum robot despite its high number of joints, owing to strong kinematic dependencies between the joints. Comparative application of N4SID, ARX, and SINDYc to input-output data produces models that are validated against experiments and shown to be usable in model predictive controller design.
What carries the argument
The two-degree-of-freedom reduction of the high-dimensional dynamics, enabled by the strong kinematic dependencies between the rolling joints.
If this is right
- The identified models enable design and implementation of model predictive controllers for real-time robot operation.
- Data-driven methods produce descriptions that match experimental behavior without requiring full nonlinear physics derivations.
- The low-order model represents the essential dynamics sufficiently for control purposes under the conditions tested.
- Similar joint designs with strong kinematic couplings may allow comparable dimensionality reductions in other continuum robots.
Where Pith is reading between the lines
- If the dependencies persist under untested loads or configurations, the same reduction could simplify control of related tendon-driven systems.
- The result suggests that certain rolling-joint geometries inherently produce low effective dimensionality that data-driven methods can exploit directly.
- Closed-loop tests with the controller under changing payloads or speeds would provide further evidence of the model's robustness for extended use.
Load-bearing premise
The kinematic dependencies between the joints remain strong and consistent enough across the tested operating conditions and inputs.
What would settle it
Drive the robot with input signals chosen to excite higher-order modes beyond the two dominant degrees of freedom and check whether the two-degree-of-freedom model predictions deviate from measured outputs by more than the validation error bounds.
Figures




read the original abstract
Developing dynamic models for tendon-driven continuum robots is challenging due to their nonlinear, high-dimensional, and friction-dominated dynamics. This paper presents a comparative study of data-driven system identification methods, including N4SID, ARX, and SINDYc, for modeling a tendon-actuated continuum robot with rolling joints developed at CERN. Despite the high number of joints of the robot, experimental analysis reveals that a two-degree-of-freedom dynamic model can accurately capture the system dynamics, owing to strong kinematic dependencies between the joints. The models are validated against experimental data, and used in the design of a model predictive controller, demonstrating their feasibility for real-time control.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a comparative study of data-driven system identification methods including N4SID, ARX, and SINDYc for a tendon-actuated continuum robot with rolling joints. It finds that a two-degree-of-freedom dynamic model can accurately capture the system dynamics due to strong kinematic dependencies between the joints, validates the models against experimental data, and uses them for model predictive control.
Significance. If validated, this demonstrates the potential for significant model simplification in high-DOF continuum robots using data-driven approaches, which is valuable for real-time control applications like MPC. The experimental validation and MPC implementation are strengths that enhance the practical impact.
major comments (1)
- §3.2 Model Order Selection: The selection of the 2DOF order is key to the central claim; the paper should detail the criteria used (e.g., variance accounted for or prediction error) and show results for nearby orders to confirm optimality.
minor comments (2)
- Abstract: The abstract lacks quantitative details on validation errors or the number of experiments performed, which would help readers assess the strength of the accuracy claim immediately.
- Figure Captions: Ensure all figures showing experimental vs predicted trajectories have clear legends and axis labels for reproducibility.
Simulated Author's Rebuttal
We thank the referee for the positive evaluation and constructive suggestion for minor revision. The comment on model order selection is addressed below with additional analysis and revisions to the manuscript.
read point-by-point responses
-
Referee: §3.2 Model Order Selection: The selection of the 2DOF order is key to the central claim; the paper should detail the criteria used (e.g., variance accounted for or prediction error) and show results for nearby orders to confirm optimality.
Authors: We agree that explicit criteria and comparative results for nearby orders would strengthen the justification for the 2DOF model. In the revised manuscript we have expanded §3.2 to report the model-order selection procedure, which was based on a combination of variance accounted for (VAF) on validation trajectories and normalized one-step prediction error. We now include a table comparing 1DOF, 2DOF, 3DOF and 4DOF models; the 2DOF model reaches >94 % VAF while further increases in order yield only marginal gains (<2 %) at substantially higher computational cost. These results are consistent with the observed kinematic coupling between the rolling joints and therefore support the central claim without altering any conclusions. revision: yes
Circularity Check
No significant circularity; derivation is empirically self-contained
full rationale
The paper is a comparative experimental study applying standard data-driven identification techniques (N4SID, ARX, SINDYc) to collected trajectories from a physical tendon-actuated robot. The central reduction to a 2DOF model is presented as an empirical observation justified by measured kinematic dependencies and validated on held-out experimental data before use in MPC; no equations, fitted parameters, or self-citations are shown to define the reported accuracy by construction. The work therefore rests on external, falsifiable measurements rather than internal re-labeling of inputs.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
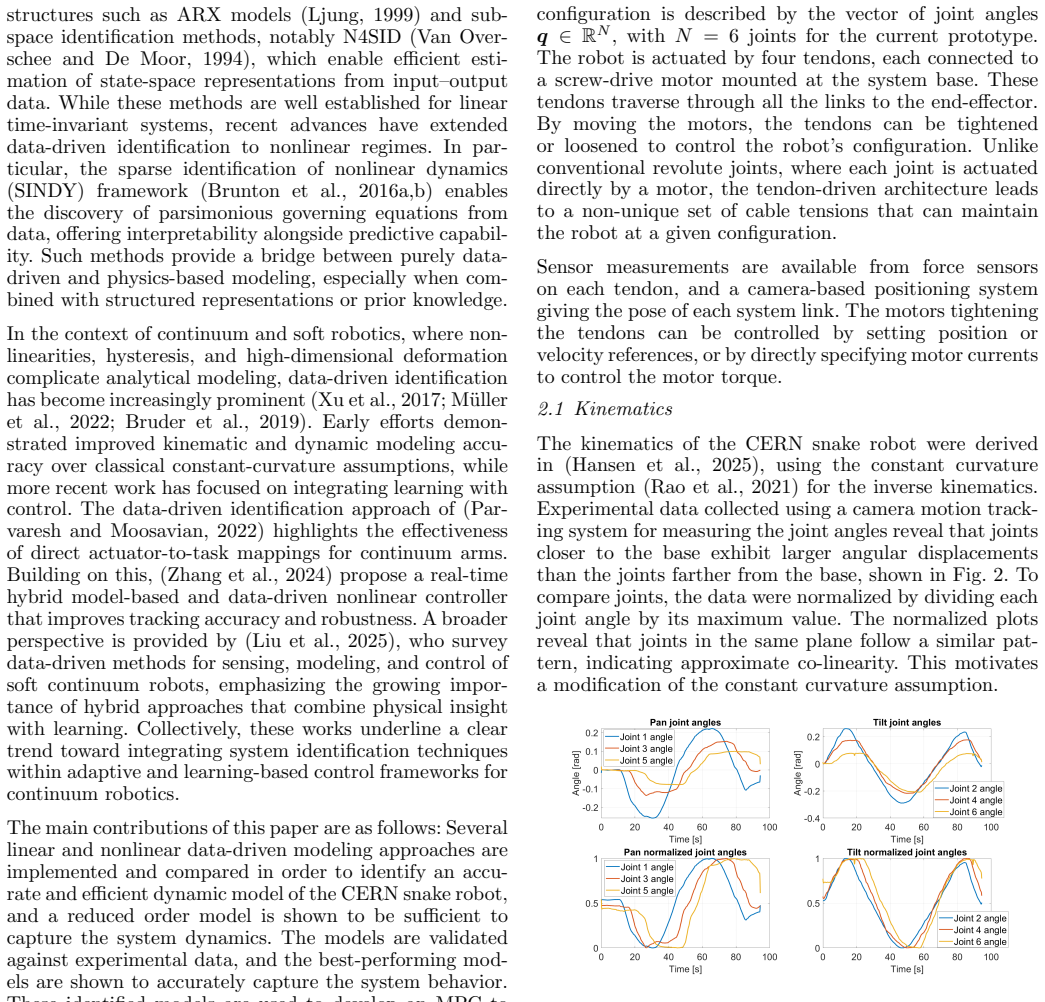
Despite the high number of joints of the robot, experimental analysis reveals that a two-degree-of-freedom dynamic model can accurately capture the system dynamics, owing to strong kinematic dependencies between the joints.
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
we assume a constant ratio between joint angles in the same plane, derived from the experimentally observed extremes: q3 ≈0.6493q1, q5 ≈0.2053q1, …
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Koopman, B. O. , year =. Hamiltonian. Proceedings of the National Academy of Sciences , volume =
-
[2]
Berberich, Julian and K. Linear Tracking. 2022 , month = sep, journal =. 2105.08567 , primaryclass =
-
[3]
Discovering Governing Equations from Data by Sparse Identification of Nonlinear Dynamical Systems , author =. 2016 , month = apr, journal =
work page 2016
-
[4]
Brunton, Steven L. and Proctor, Joshua L. and Kutz, J. Nathan , year =. Sparse. IFAC-PapersOnLine , volume =
-
[5]
Proctor, Joshua L. and Brunton, Steven L. and Kutz, J. Nathan , year =. Dynamic. SIAM Journal on Applied Dynamical Systems , volume =
-
[6]
Koopman Invariant Subspaces and Finite Linear Representations of Nonlinear Dynamical Systems for Control , author =. 2016 , month = feb, journal =. 1510.03007 , primaryclass =
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[7]
Brunton, Steven L and Kutz, J Nathan , year =. Data
-
[8]
Budi. Applied. 2012 , month = dec, journal =. 1206.3164 , primaryclass =
work page internal anchor Pith review Pith/arXiv arXiv 2012
-
[9]
Chen, Zixi and Renda, Federico and Le Gall, Alexia and Mocellin, Lorenzo and Bernabei, Matteo and Dangel, Th. Data-. 2025 , journal =
work page 2025
-
[10]
Coulson, Jeremy and Lygeros, John and D. Data-. 2019 , month = mar, number =. 1811.05890 , primaryclass =
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[11]
D'Antuono, Gianluca and Pettersen, Kristin Y. and Buonocore, Luca R. and Gravdahl, Jan Tommy and Di Castro, Mario , year =. Dynamic Model of a Tendon-Actuated Snake Robot Using the. IFAC-PapersOnLine , volume =
-
[12]
D'Antuono, Gianluca and Pettersen, Kristin Y. and Buonocore, Luca R. and Gravdahl, Jan Tommy and Di Castro, Mario , year =. Path. Proc. 2024
work page 2024
-
[13]
Data-enabled Predictive Control for Quadcopters , author =. 2021 , month = dec, journal =
work page 2021
-
[14]
Fasel, Urban and Kaiser, Eurika and Kutz, J. Nathan and Brunton, Bingni W. and Brunton, Steven L. , year =. 2021 60th
work page 2021
-
[15]
Han, Lvpeng and Peng, Kerui and Chen, Wangxing and Liu, Zhaobing , year =. A. International Journal of Control, Automation and Systems , volume =
-
[16]
Trajectory Tracking Control of a Tendon-Actuated Manipulator with Rolling Joints , author =. 2025 , month =
work page 2025
- [17]
-
[18]
An Eigensystem Realization Algorithm for Modal Parameter Identification and Model Reduction , author =. 1985 , month = sep, journal =
work page 1985
-
[19]
Juang, Jer-Nan and Phan, Minh and Horta, Lucas G. and Longman, Richard W. , year =. Identification of Observer/. Proc
-
[20]
Juang, Jer-Nan and Phan, Minh and Horta, Lucas G. and Longman, Richard W. , year =. Identification of Observer/. Journal of Guidance, Control, and Dynamics , volume =
-
[21]
Sparse identification of nonlinear dynamics for model predictive control in the low-data limit
Sparse Identification of Nonlinear Dynamics for Model Predictive Control in the Low-Data Limit , author =. 2018 , month = nov, journal =. 1711.05501 , primaryclass =
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[22]
Kaiser, Eurika and Kutz, J. Nathan and Brunton, Steven L. , year =. Data-Driven Discovery of. 1707.01146 , primaryclass =
- [23]
-
[24]
Ljung, Lennart , year =. System
-
[25]
Reduced-Order Models for Control of Fluids Using the Eigensystem Realization Algorithm , author =. 2011 , month = jun, journal =
work page 2011
-
[26]
Behavioral Systems Theory in Data-Driven Analysis, Signal Processing, and Control , author =. 2021 , month = jan, journal =
work page 2021
- [27]
-
[28]
M. Data-. Proc. 2022 , month = dec, pages =
work page 2022
-
[29]
Experimental Modal Analysis of a Single-Link Flexible Robotic Manipulator with Curved Geometry Using Applied System Identification Methods , author =. 2023 , month = oct, journal =
work page 2023
-
[30]
Model Reduction for Fluids, Using Balanced Proper Orthogonal Decomposition , author =. 2005 , month = mar, journal =
work page 2005
-
[31]
Dynamic Mode Decomposition of Numerical and Experimental Data , author =. 2010 , month = aug, journal =
work page 2010
-
[32]
Tiano, A. and Sutton, R. and Lozowicki, A. and Naeem, W. , year =. Observer. Control Engineering Practice , volume =
-
[33]
Van Overschee, Peter and De Moor, Bart , year =. Automatica , volume =
- [34]
-
[35]
Williams, Matthew O. and Kevrekidis, Ioannis G. and Rowley, Clarence W. , year =. A. Journal of Nonlinear Science , volume =
-
[36]
Data-Driven Methods towards Learning the Highly Nonlinear Inverse Kinematics of Tendon-Driven Surgical Manipulators , author =. 2017 , journal =
work page 2017
-
[37]
A Data-Driven Predictive Controller Design Based on Reduced
Yang, Hua and Li, Shaoyuan , year =. A Data-Driven Predictive Controller Design Based on Reduced. 2015 10th
work page 2015
-
[38]
Robinson, G. and Davies, J.B.C. , year =. Continuum Robots - a State of the Art , booktitle =
- [39]
-
[40]
Rao, Priyanka and Peyron, Quentin and Lilge, Sven and. How to. 2021 , month = feb, journal =
work page 2021
-
[41]
Caleb and Webster III, Robert J
Rucker, D. Caleb and Webster III, Robert J. , year =. Statics and. IEEE Transactions on Robotics , volume =
-
[42]
Rucker, D. Caleb and Webster, Robert J. , year =. Computing. 2011
work page 2011
-
[43]
Kim, Yong-Jae and Cheng, Shanbao and Kim, Sangbae and Iagnemma, Karl , year =. A. IEEE Transactions on Robotics , volume =
-
[44]
David and Vasudevan, Ram , year =
Bruder, Daniel and Remy, C. David and Vasudevan, Ram , year =. Nonlinear. 2019
work page 2019
-
[45]
Di Castro, Mario and Ferre, Manuel and Masi, Alessandro , year =. IEEE Access , volume =
-
[46]
A dual arms robotic platform control for navigation, inspection and telemanipulation , author =. 2017 , booktitle =
work page 2017
-
[47]
Dynamics and Path Tracking of Continuum Robotic Arms Using Data-Driven Identification Tools , author =. Robotica , volume =
- [48]
-
[49]
Liu, Jiaqi and Duo, Youning and Chen, Xingyu and Zuo, Zonghao and Liu, Yuchen and Wen, Li , year = 2025, month = dec, journal =. Data-
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.