Q-SpiRL: Quantum Spiking Reinforcement Learning for Adaptive Robot Navigation
Pith reviewed 2026-05-21 04:46 UTC · model grok-4.3
The pith
A hybrid quantum spiking neural network policy outperforms other models by balancing high success rates with efficient and smooth robot trajectories in dynamic grids.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper establishes that among tabular Q-learning, classical MLP, classical SNN, quantum-enhanced MLP, and quantum-enhanced spiking neural network agents, the QSNN achieves the strongest overall trade-off between task completion, trajectory efficiency, and motion smoothness, reaching up to 99% success rate while maintaining high path efficiency in the most challenging 40x40 setting with dynamic obstacles.
What carries the argument
The QSNN architecture, which combines spike-based temporal processing with variational quantum feature transformation to map navigation states into actions within the reinforcement learning loop.
If this is right
- QSNN policies complete navigation tasks at higher rates than the other tested agent families as environment size and obstacle dynamics increase.
- The model keeps path lengths short and turn rates low, producing more stable motion than alternatives in the same settings.
- A single training and evaluation pipeline allows direct comparison across classical, spiking, quantum, and hybrid agents.
- The hybrid policy remains executable on quantum hardware while preserving the reported performance characteristics.
Where Pith is reading between the lines
- The same spike-quantum fusion might support navigation in continuous rather than grid-based spaces if the quantum layer can process richer sensor inputs.
- Physical robot trials with added sensor noise would test whether the simulation advantages survive real dynamics.
- Energy use on embedded hardware could be lower than standard neural policies because of the spiking component.
Load-bearing premise
Performance measured under deterministic inference in simulated grid worlds with the described obstacle setups will generalize to physical robots and more complex real-world dynamics.
What would settle it
Executing the QSNN policy on a physical robot in a comparable obstacle layout and recording a success rate well below 99% or markedly lower path efficiency and smoothness would show the claimed trade-off does not hold outside simulation.
Figures




read the original abstract
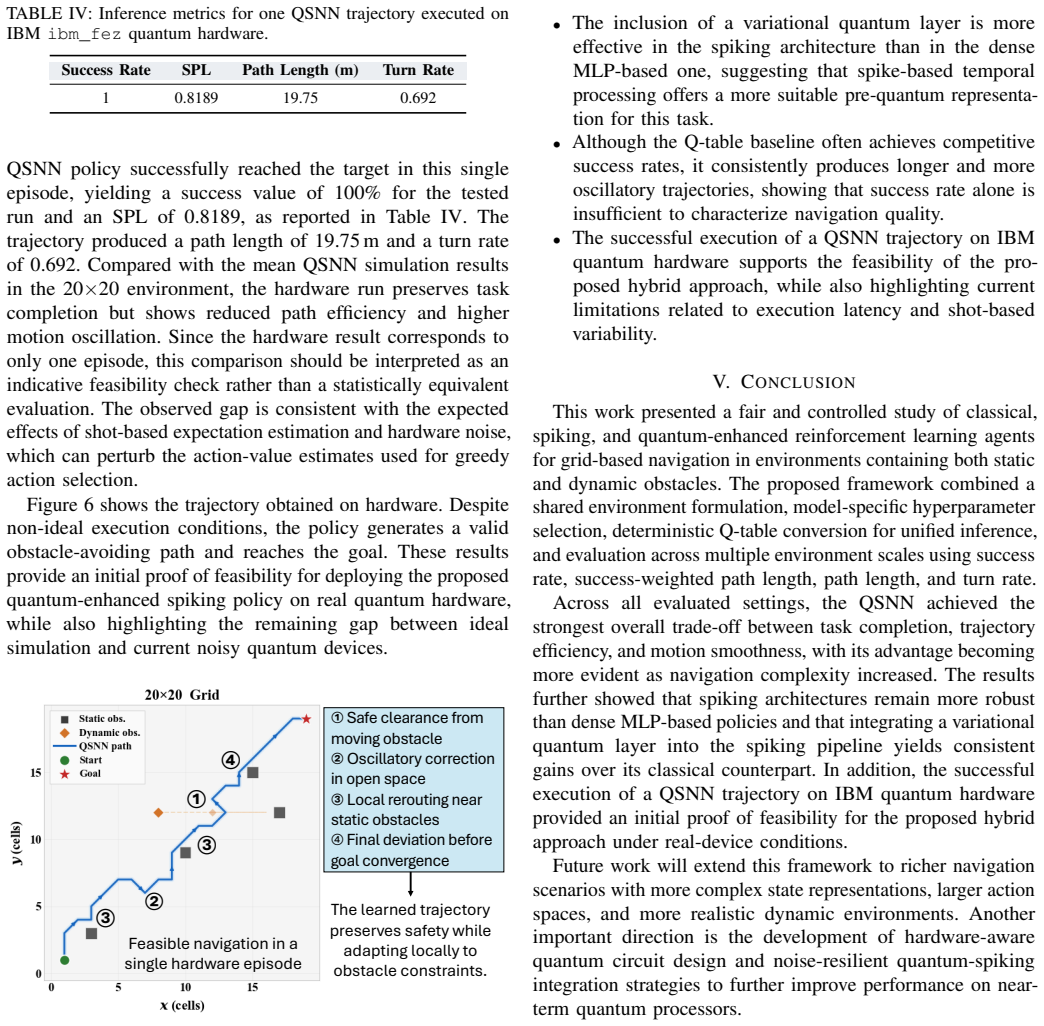
Adaptive robot navigation in dynamic environments requires policies that can reach the target reliably while producing efficient and stable trajectories. This paper presents Q-SpiRL, a quantum spiking reinforcement learning framework for obstacle-aware robot navigation. The framework develops and evaluates five agent families: tabular Q-learning, classical MLP, classical SNN, quantum-enhanced MLP (QMLP), and quantum-enhanced spiking neural network (QSNN). While all models are implemented under a unified training and evaluation pipeline, the QSNN is the central architecture of interest, as it combines spike-based temporal processing with variational quantum feature transformation. Experiments are conducted across three grid-world environments of increasing size, namely 20x20, 30x30, and 40x40, with both static and dynamic obstacles. Performance is assessed using success rate, success-weighted path length, path length, and turn rate under deterministic inference. Results show that QSNN achieves the strongest overall trade-off between task completion, trajectory efficiency, and motion smoothness, reaching up to 99% success rate while maintaining high path efficiency in the most challenging setting. Execution on IBM quantum hardware further demonstrates the feasibility of deploying the proposed hybrid policy under real-device conditions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Q-SpiRL, a hybrid quantum spiking reinforcement learning framework for obstacle-aware robot navigation. It implements and compares five agent families (tabular Q-learning, classical MLP, classical SNN, QMLP, and QSNN) under a unified training and evaluation pipeline across 20×20, 30×30, and 40×40 grid worlds containing static and dynamic obstacles. Performance is measured via success rate, success-weighted path length, path length, and turn rate under deterministic inference. The central claim is that the QSNN architecture, which combines spike-based temporal processing with variational quantum feature transformation, delivers the strongest overall trade-off, reaching up to 99% success rate while preserving high path efficiency and motion smoothness; feasibility on IBM quantum hardware is also shown.
Significance. If the performance advantages hold under more realistic conditions, the work would demonstrate a concrete benefit from fusing variational quantum circuits with spiking neurons inside an RL policy for robotic navigation, particularly in handling temporal sequences and high-dimensional state spaces. The unified pipeline across model families and the hardware execution demonstration are clear strengths that support reproducibility and practicality. At present, however, the simulation-only scope limits the immediate significance for the stated goal of adaptive robot navigation.
major comments (2)
- [Experiments and Evaluation] The central claim that QSNN provides a framework for adaptive robot navigation in dynamic environments rests on results obtained exclusively in discrete grid worlds under deterministic inference with perfect state observation. No experiments address continuous kinematics, sensor noise, actuation latency, or sim-to-real transfer, which directly undermines applicability to physical robots as framed in the abstract and introduction.
- [Results] The reported 99% success rate and best trade-off in success-weighted path length and turn rate lack accompanying statistical tests, confidence intervals, or multiple random seeds with error bars. Without these, it is difficult to establish that the observed differences over the other four agents are robust rather than artifacts of a single deterministic run.
minor comments (2)
- [Abstract] The abstract and introduction would benefit from a brief statement of the precise variational quantum circuit ansatz and spike encoding scheme used in the QSNN, as these details are central to reproducing the hybrid architecture.
- [Experimental Setup] Clarify whether the dynamic obstacles follow deterministic or stochastic motion models and whether any hyperparameter tuning was performed separately for each agent family to ensure fair comparison.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment below, providing clarifications on the scope of our work and outlining the revisions we will implement to improve the manuscript.
read point-by-point responses
-
Referee: [Experiments and Evaluation] The central claim that QSNN provides a framework for adaptive robot navigation in dynamic environments rests on results obtained exclusively in discrete grid worlds under deterministic inference with perfect state observation. No experiments address continuous kinematics, sensor noise, actuation latency, or sim-to-real transfer, which directly undermines applicability to physical robots as framed in the abstract and introduction.
Authors: We acknowledge that the experiments are performed in discrete grid worlds with perfect state observation and deterministic inference. This design choice enables a controlled, unified evaluation pipeline across the five agent families (tabular Q-learning, MLP, SNN, QMLP, and QSNN) while isolating the effects of the hybrid quantum-spiking architecture. Grid-world navigation with static and dynamic obstacles is a standard benchmark in RL literature for assessing obstacle avoidance and path efficiency. The IBM quantum hardware demonstration further supports the feasibility of the QSNN policy. We agree, however, that the abstract and introduction could more precisely delimit the current scope. In the revised manuscript we will (i) tone down phrasing in the abstract and introduction to emphasize the discrete-grid setting as an initial controlled demonstration, and (ii) add a dedicated Limitations and Future Work subsection that explicitly lists the absence of continuous kinematics, sensor noise, actuation latency, and sim-to-real transfer, together with planned extensions. revision: partial
-
Referee: [Results] The reported 99% success rate and best trade-off in success-weighted path length and turn rate lack accompanying statistical tests, confidence intervals, or multiple random seeds with error bars. Without these, it is difficult to establish that the observed differences over the other four agents are robust rather than artifacts of a single deterministic run.
Authors: The referee correctly notes the lack of statistical rigor in the reported metrics. Although inference is deterministic, training contains stochastic components (exploration, weight initialization, quantum circuit sampling). To address this, we will rerun all experiments with a minimum of five independent random seeds, report means and standard deviations, add error bars to the relevant figures, and include statistical significance tests (paired t-tests or Wilcoxon signed-rank tests with p-values) comparing QSNN against the baselines. These updates will appear in the revised results section, tables, and figures. revision: yes
Circularity Check
No circularity: performance claims rest on direct empirical comparisons in simulated grid worlds
full rationale
The paper introduces the Q-SpiRL framework and evaluates five agent families (tabular Q-learning, MLP, SNN, QMLP, QSNN) across 20x20 to 40x40 grid environments with static and dynamic obstacles. Central results such as QSNN reaching up to 99% success rate with best trade-off in success-weighted path length and turn rate are obtained via unified training and deterministic inference testing. No derivation chain, first-principles equations, or predictions are presented that reduce by construction to fitted inputs, self-definitions, or self-citation load-bearing premises. The claims are grounded in comparative experimental metrics rather than any self-referential reduction, rendering the analysis self-contained.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Vision for mobile robot navigation: A survey,
G. N. DeSouza and A. C. Kak, “Vision for mobile robot navigation: A survey,”IEEE transactions on pattern analysis and machine intelligence, vol. 24, no. 2, pp. 237–267, 2002
work page 2002
-
[2]
A survey of autonomous robots and multi-robot naviga- tion: Perception, planning and collaboration,
W. Chenet al., “A survey of autonomous robots and multi-robot naviga- tion: Perception, planning and collaboration,”Biomimetic Intelligence and Robotics, vol. 5, no. 2, p. 100203, 2025
work page 2025
-
[3]
A comprehensive review on autonomous navigation,
S. Nahavandiet al., “A comprehensive review on autonomous navigation,” ACM Computing Surveys, vol. 57, no. 9, pp. 1–67, 2025
work page 2025
-
[4]
R. S. Sutton, A. G. Bartoet al.,Reinforcement learning: An introduction. MIT press Cambridge, 1998, vol. 1, no. 1
work page 1998
-
[5]
Deep reinforcement learning based mobile robot navigation: A review,
K. Zhu and T. Zhang, “Deep reinforcement learning based mobile robot navigation: A review,”Tsinghua Science and Technology, vol. 26, no. 5, pp. 674–691, 2021
work page 2021
-
[6]
C. J. Watkins and P. Dayan, “Q-learning,”Machine learning, vol. 8, no. 3, pp. 279–292, 1992
work page 1992
-
[7]
A review of reinforcement learning for autonomous building energy management,
K. Mason and S. Grijalva, “A review of reinforcement learning for autonomous building energy management,”Computers & Electrical Engineering, vol. 78, pp. 300–312, 2019
work page 2019
-
[8]
Reinforcement learning, fast and slow,
M. Botvinick, S. Ritter, J. X. Wang, Z. Kurth-Nelson, C. Blundell, and D. Hassabis, “Reinforcement learning, fast and slow,”Trends in cognitive sciences, vol. 23, no. 5, pp. 408–422, 2019
work page 2019
-
[9]
S. Ghosh-Dastidar and H. Adeli, “Spiking neural networks,”International journal of neural systems, vol. 19, no. 04, pp. 295–308, 2009
work page 2009
-
[10]
A survey of robotics control based on learning-inspired spiking neural networks,
Z. Bing, C. Meschede, F. R ¨ohrbein, K. Huang, and A. C. Knoll, “A survey of robotics control based on learning-inspired spiking neural networks,”Frontiers in neurorobotics, vol. 12, p. 35, 2018
work page 2018
-
[11]
X. Zhang, Y . Cao, J. Huang, J. Liu, and Z.-Q. Zhang, “A systematic review of spiking neural networks for human-robot interaction in rehabilitative wearable robotics,”IEEE Transactions on Cognitive and Developmental Systems, 2025
work page 2025
-
[12]
Deep reinforcement learning with spiking q-learning,
D. Chen, P. Peng, T. Huang, and Y . Tian, “Deep reinforcement learning with spiking q-learning,”ArXiv, vol. abs/2201.09754, 2022
-
[13]
Exploring spiking neural networks for deep reinforcement learning in robotic tasks,
L. Zanatta, F. Barchi, S. Manoni, S. Tolu, A. Bartolini, and A. Acquaviva, “Exploring spiking neural networks for deep reinforcement learning in robotic tasks,”Scientific Reports 2024 14:1, vol. 14, pp. 30 648–, 12 2024
work page 2024
-
[14]
Dsqn: Robust path planning of mobile robot based on deep spiking q-network,
A. Kumar, L. Zhang, H. Bilal, S. Wang, A. M. Shaikh, L. Bo, A. Rohra, and A. Khalid, “Dsqn: Robust path planning of mobile robot based on deep spiking q-network,”Neurocomputing, vol. 634, p. 129916, 2025
work page 2025
-
[15]
J. Biamonte, P. Wittek, N. Pancotti, P. Rebentrost, N. Wiebe, and S. Lloyd, “Quantum machine learning,”Nature 2017 549:7671, vol. 549, pp. 195– 202, 9 2017
work page 2017
-
[16]
Djork-Arné Clevert, Thomas Unterthiner, and Sepp Hochreiter
S. Y . Chang and M. Cerezo, “A primer on quantum machine learning,” arXiv preprint arXiv:2511.15969, 2025
-
[17]
The emergence of deep reinforcement learning for path planning,
T. T. Nguyen, S. Nahavandi, I. Razzak, D. Nguyen, N. T. Pham, and Q. Viet Hung Nguyen, “The emergence of deep reinforcement learning for path planning,” in2025 IEEE International Conference on Systems, Man, and Cybernetics (SMC), 2025, pp. 6265–6272
work page 2025
-
[18]
Exploring neuromorphic computing based on spiking neural networks: Algorithms to hardware,
N. Rathi, I. Chakraborty, A. Kosta, A. Sengupta, A. Ankit, P. Panda, and K. Roy, “Exploring neuromorphic computing based on spiking neural networks: Algorithms to hardware,”ACM Computing Surveys, vol. 55, no. 12, pp. 1–49, 2023
work page 2023
-
[19]
B. Yanget al., “Hsrl: A hierarchical control system based on spiking deep reinforcement learning for robot navigation,”Proceedings - IEEE International Conference on Robotics and Automation, 2025
work page 2025
-
[20]
Lep-qnn: Loan eligibility prediction using quantum neural networks,
N. Innan, A. Marchisio, M. Bennai, and M. Shafique, “Lep-qnn: Loan eligibility prediction using quantum neural networks,” in2025 IEEE International Conference on Quantum Computing and Engineering (QCE), vol. 1. IEEE, 2025, pp. 1864–1872
work page 2025
-
[21]
Qnn-vrcs: A quantum neural network for vehicle road cooperation systems,
N. Innan, B. K. Behera, S. Al-Kuwari, and A. Farouk, “Qnn-vrcs: A quantum neural network for vehicle road cooperation systems,”IEEE Transactions on Intelligent Transportation Systems, 2025
work page 2025
-
[22]
Next- generation quantum neural networks: Enhancing efficiency, security, and privacy,
N. Innan, M. Kashif, A. Marchisio, M. Bennai, and M. Shafique, “Next- generation quantum neural networks: Enhancing efficiency, security, and privacy,” in2025 IEEE 31st International Symposium on On-Line Testing and Robust System Design (IOLTS). IEEE, 2025, pp. 1–4
work page 2025
-
[23]
Parametrized quantum policies for reinforcement learning,
S. Jerbi, C. Gyurik, S. Marshall, H. Briegel, and V . Dunjko, “Parametrized quantum policies for reinforcement learning,”Advances in neural information processing systems, vol. 34, pp. 28 362–28 375, 2021
work page 2021
-
[24]
Qadqn: Quantum attention deep q-network for financial market prediction,
S. Dutta, N. Innan, A. Marchisio, S. B. Yahia, and M. Shafique, “Qadqn: Quantum attention deep q-network for financial market prediction,” in2024 IEEE International Conference on Quantum Computing and Engineering (QCE), vol. 2. IEEE, 2024, pp. 341–346
work page 2024
-
[25]
S. Dutta, N. Innan, S. B. Yahia, and M. Shafique, “QAS-QTNs: Curriculum reinforcement learning-driven quantum architecture search for quantum tensor networks,” in2025 IEEE International Conference on Quantum Computing and Engineering (QCE), vol. 1. IEEE, 2025, pp. 1739–1747
work page 2025
- [26]
-
[27]
Quantum reinforcement learning in dynamic environments,
O. Sefrin, M. Radons, L. Simon, and S. W ¨olk, “Quantum reinforcement learning in dynamic environments,”arXiv preprint arXiv:2507.01691, 2025
-
[28]
Robust quantum-inspired reinforcement learning for robot navigation,
D. Dong, C. Chen, J. Chu, and T.-J. Tarn, “Robust quantum-inspired reinforcement learning for robot navigation,”IEEE/ASME transactions on mechatronics, vol. 17, no. 1, pp. 86–97, 2010
work page 2010
-
[29]
Quantum deep reinforcement learning for robot navigation tasks,
H. Hohenfeld, D. Heimann, F. Wiebe, and F. Kirchner, “Quantum deep reinforcement learning for robot navigation tasks,”IEEE Access, vol. 12, pp. 87 217–87 236, 2024
work page 2024
-
[30]
Nav-q: quantum deep reinforce- ment learning for collision-free navigation of self-driving cars,
A. Sinha, A. Macaluso, and M. Klusch, “Nav-q: quantum deep reinforce- ment learning for collision-free navigation of self-driving cars,”Quantum Machine Intelligence, vol. 7, no. 1, p. 19, 2025
work page 2025
-
[31]
S. Tomar, S. Alam, S. Kumar, and A. Mathur, “Quantum-enhanced hybrid reinforcement learning framework for dynamic path planning in autonomous systems,”arXiv preprint arXiv:2504.20660, 2025
-
[32]
Qmarl: A quantum multi- agent reinforcement learning framework for swarm robots navigation,
W. Chen, J. Wan, F. Ye, R. Wang, and C. Xu, “Qmarl: A quantum multi- agent reinforcement learning framework for swarm robots navigation,” in2024 IEEE International Conference on Acoustics, Speech, and Signal Processing Workshops (ICASSPW). IEEE, 2024, pp. 388–392
work page 2024
-
[33]
QUA V: Quantum-assisted path planning and optimization for uav navigation with obstacle avoidance,
N. Innan, M. Kashif, A. Marchisio, Y .-S. Gan, F. Barbaresco, and M. Shafique, “QUA V: Quantum-assisted path planning and optimization for uav navigation with obstacle avoidance,” in2025 IEEE International Conference on Quantum Artificial Intelligence (QAI). IEEE, 2025, pp. 208–215
work page 2025
-
[34]
A novel hybrid quantum architecture for path planning in quantum-enabled autonomous mobile robots,
M. Sarkar, J. Pradhan, A. K. Singh, and H. Nenavath, “A novel hybrid quantum architecture for path planning in quantum-enabled autonomous mobile robots,”IEEE Transactions on Consumer Electronics, vol. 70, no. 3, pp. 5597–5606, 2024
work page 2024
-
[35]
Quantum robotics: a review of emerging trends,
F. Yan, A. M. Iliyasu, N. Li, A. S. Salama, and K. Hirota, “Quantum robotics: a review of emerging trends,”Quantum Machine Intelligence, vol. 6, no. 2, p. 86, 2024
work page 2024
-
[36]
Current trends and advances in quantum navigation for maritime applications: A comprehensive review,
O. Sambataro, R. Costanzi, J. Alves, A. Caiti, P. Paglierani, R. Petroccia, and A. Munaf `o, “Current trends and advances in quantum navigation for maritime applications: A comprehensive review,”IEEE Journal of Oceanic Engineering, 2025
work page 2025
-
[37]
Classification with integrated quantum and spiking neural networks,
D. Pasquali, M. Grossi, and S. Vallecorsa, “Classification with integrated quantum and spiking neural networks,” in2023 IEEE International Conference on Quantum Computing and Engineering (QCE), vol. 2. IEEE, 2023, pp. 298–299
work page 2023
-
[38]
A quantum leaky integrate-and-fire spiking neuron and network,
D. Brand and F. Petruccione, “A quantum leaky integrate-and-fire spiking neuron and network,”npj Quantum Information 2024 10:1, vol. 10, pp. 125–, 12 2024
work page 2024
-
[39]
Quantum-enhanced spiking neural networks,
R. Khatoniar, D. Konar, and V . Aggarwal, “Quantum-enhanced spiking neural networks,”Proceedings - IEEE Quantum Week 2024, QCE 2024, vol. 2, pp. 490–491, 2024
work page 2024
-
[40]
FL-QDSNNs: Federated learning with quantum dynamic spiking neural networks,
N. Innan, A. Marchisio, and M. Shafique, “FL-QDSNNs: Federated learning with quantum dynamic spiking neural networks,” in2025 IEEE International Conference on Quantum Artificial Intelligence (QAI). IEEE, 2025, pp. 113–119
work page 2025
-
[41]
Quantum spiking neural networks for image classification,
S. Liu and Y . Gu, “Quantum spiking neural networks for image classification,” inThird International Conference on Algorithms, Network, and Communication Technology (ICANCT 2024), vol. 13545. SPIE, 2025, pp. 181–188
work page 2024
-
[42]
SPATE: Spiking-Phase Adaptive Temporal Encoding for Quantum Machine Learning
N. Innan, R. V . W. Putra, and M. Shafique, “Spate: Spiking-phase adaptive temporal encoding for quantum machine learning,”arXiv preprint arXiv:2604.11022, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.