Towards UAV Detection in the Real World: A New Multispectral Dataset UAVNet-MS and a New Method
Pith reviewed 2026-05-21 05:04 UTC · model grok-4.3
The pith
Multispectral imaging supplies material signatures that raise small-UAV detection accuracy by 6.2 percent over the best RGB-only detectors.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
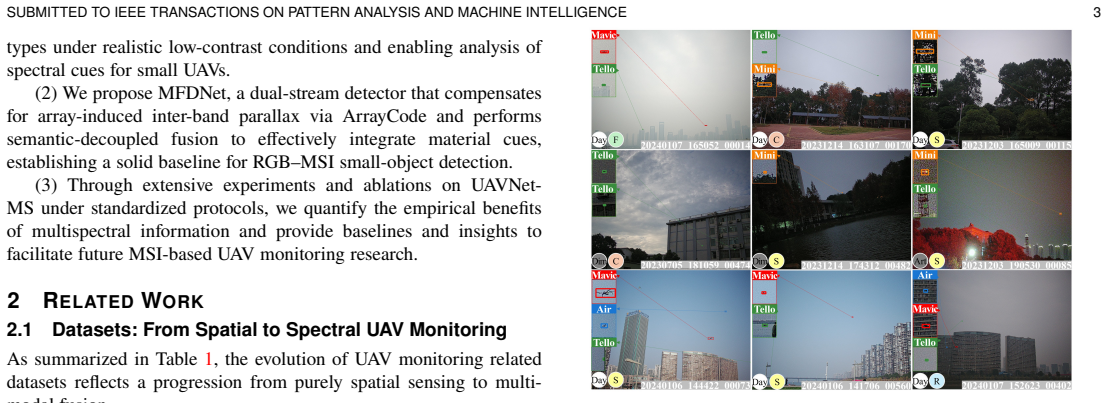
UAVNet-MS supplies 15,618 temporally synchronized RGB-MSI data cubes of 1440 by 1080 pixels with bounding-box labels; 93.7 percent of the UAVs occupy 32 squared pixels or less. MFDNet processes the two streams to correct array-induced parallax and performs spatial-spectral fusion. When evaluated under RGB-only, MSI-only, and combined protocols, MFDNet raises AP50 by 6.2 percent relative to the strongest RGB baseline, confirming that multispectral signatures furnish complementary material evidence for separating UAVs from clutter.
What carries the argument
MFDNet, a dual-stream network that aligns array-induced parallax between RGB and multispectral channels and fuses spatial features with spectral signatures for small-object classification.
If this is right
- Spectral channels can be added to existing RGB pipelines to improve detection of tiny, low-contrast objects without requiring higher spatial resolution.
- The UAVNet-MS benchmark allows direct comparison of future multispectral fusion methods against the reported dual-stream baseline.
- Material-aware detection reduces false positives in cluttered outdoor scenes where spatial appearance alone is ambiguous.
- The dataset supports training of detectors that generalize across UAV types sharing similar materials but differing shapes.
Where Pith is reading between the lines
- The same spectral-fusion strategy could be tested on other small-object categories such as birds or insects where material contrast differs from the background.
- Extending the dataset with additional spectral bands or temporal sequences might further reduce reliance on spatial cues.
- Real-time deployment on UAV platforms would require measuring the computational overhead of the dual-stream architecture under onboard power limits.
Load-bearing premise
The multispectral signatures collected for UAVs stay distinct enough from background materials to aid detection even when the objects occupy only a few dozen pixels and appear at low contrast.
What would settle it
A controlled experiment in which new scenes contain background materials whose spectral reflectance closely matches that of the UAV airframes, causing the reported AP50 gain to disappear or reverse.
Figures








read the original abstract
The proliferation of unmanned aerial vehicles (UAVs) has created urgent demand for precise UAV monitoring. Existing RGB-based systems rely on spatial cues that degrade at small scales, particularly with high inter-type similarity, target-clutter ambiguity, and low contrast. Multispectral imaging (MSI) encodes material-aware spectral signatures, yet MSI-based fine-grained small-UAV detection remains underexplored due to lack of dedicated datasets. We introduce UAVNet-MS, the first multispectral dataset for fine-grained small-UAV detection, comprising 15,618 temporally synchronized RGB-MSI data cubes (1440x1080) with bounding box annotations. The dataset features challenging small objects (93.7% <= 32^2 pixels, average 18^2 pixels, ~0.02% image area) under low contrast. We propose MFDNet, a dual-stream baseline addressing array-induced parallax and spatial-spectral fusion. Extensive evaluation under RGB-only, MSI-only, and RGB+MSI protocols against 20 detectors shows MFDNet achieves +6.2% AP50 improvement over best RGB-only methods, demonstrating spectral cues provide complementary material evidence beyond spatial cues. This work provides foundational dataset, strong baseline, and benchmark for multispectral UAV monitoring research.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces UAVNet-MS, the first multispectral dataset for fine-grained small-UAV detection comprising 15,618 temporally synchronized RGB-MSI data cubes (1440x1080) with bounding-box annotations. It emphasizes challenging conditions with 93.7% of objects ≤32² pixels (average 18² pixels, ~0.02% image area) under low contrast. The authors propose MFDNet, a dual-stream baseline that corrects array-induced parallax and fuses spatial-spectral features, reporting a +6.2% AP50 improvement over the best of 20 RGB-only detectors and attributing the gain to complementary material evidence from spectral signatures.
Significance. If the numerical gain is shown to arise from genuine spectral separability rather than capacity or registration effects, the dataset and baseline would provide a valuable foundation for multispectral UAV monitoring research, extending beyond RGB limitations in small-object, low-contrast regimes. The work supplies both a new resource and an initial benchmark that future methods can build upon.
major comments (3)
- Results section: the headline +6.2% AP50 improvement is presented without error bars, standard deviations across runs, or statistical significance tests. Given that 93.7% of targets are ≤32² pixels (mean ~18² pixels), performance variance is expected to be high; the absence of these statistics makes it impossible to judge whether the reported margin is reliable or reproducible.
- Ablation / fusion analysis: no controlled experiment replaces the MSI channels with duplicated RGB or additive noise while freezing the dual-stream architecture. Without this isolation, the observed gain cannot be confidently attributed to material-aware spectral cues rather than increased model capacity or the parallax-correction module itself.
- Dataset characterization: the manuscript contains no band-wise signature plots, per-class separability metrics (e.g., Bhattacharyya distance between UAV and clutter distributions), or even simple mean/variance statistics per spectral band for the small-object subset. This leaves the core assumption—that MSI signatures remain distinct and useful under the stated low-contrast, sub-32²-pixel regime—unverified.
minor comments (2)
- The abstract states evaluation against “20 detectors” yet the main text does not provide a single consolidated table listing all baselines with their exact AP50 scores under the RGB-only protocol; adding such a table would improve clarity and reproducibility.
- Notation for the dual-stream fusion module is introduced without an accompanying equation or diagram that explicitly shows how the parallax-corrected MSI features are combined with RGB features; a concise mathematical description would aid readers.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the presentation of our results and the characterization of UAVNet-MS. We address each major comment below and will revise the manuscript to incorporate the suggested improvements.
read point-by-point responses
-
Referee: Results section: the headline +6.2% AP50 improvement is presented without error bars, standard deviations across runs, or statistical significance tests. Given that 93.7% of targets are ≤32² pixels (mean ~18² pixels), performance variance is expected to be high; the absence of these statistics makes it impossible to judge whether the reported margin is reliable or reproducible.
Authors: We agree that statistical validation is essential given the small target sizes and expected variance. In the revised manuscript we will report results from five independent training runs with different random seeds, include error bars showing mean and standard deviation for AP50, and add paired t-tests to establish statistical significance of the observed gains over the RGB-only baselines. revision: yes
-
Referee: Ablation / fusion analysis: no controlled experiment replaces the MSI channels with duplicated RGB or additive noise while freezing the dual-stream architecture. Without this isolation, the observed gain cannot be confidently attributed to material-aware spectral cues rather than increased model capacity or the parallax-correction module itself.
Authors: This is a fair criticism. We will add a new ablation study that freezes the dual-stream architecture and parallax-correction module while replacing the MSI input channels with either duplicated RGB channels or Gaussian noise matched to the original channel statistics. The results will be reported alongside the existing experiments to isolate the contribution of genuine spectral material cues. revision: yes
-
Referee: Dataset characterization: the manuscript contains no band-wise signature plots, per-class separability metrics (e.g., Bhattacharyya distance between UAV and clutter distributions), or even simple mean/variance statistics per spectral band for the small-object subset. This leaves the core assumption—that MSI signatures remain distinct and useful under the stated low-contrast, sub-32²-pixel regime—unverified.
Authors: We acknowledge the value of explicit spectral characterization. The revised manuscript will include (i) mean spectral signature plots for UAV versus background pixels on the small-object subset, (ii) per-band mean and variance statistics, and (iii) Bhattacharyya distance and Jeffries-Matusita separability metrics computed between UAV and clutter distributions in the sub-32²-pixel regime. These additions will directly support the claim that MSI provides complementary material evidence. revision: yes
Circularity Check
Empirical evaluation on newly collected dataset with no derivation chain
full rationale
The manuscript introduces UAVNet-MS as a new dataset and MFDNet as a dual-stream detector, then reports protocol-wise AP50 numbers from direct comparisons against 20 existing detectors. No equations, predictions, or uniqueness claims are present that reduce by construction to fitted inputs, self-citations, or renamed empirical patterns. The +6.2% gain is presented strictly as an observed experimental outcome on the held-out test split, rendering the reported chain self-contained and non-circular.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Multispectral imaging encodes material-aware spectral signatures that are complementary to spatial cues in RGB images for small-object discrimination.
Reference graph
Works this paper leans on
-
[1]
Detection and tracking meet drones challenge,
P. Zhu, L. Wen, D. Du, X. Bian, H. Fan, Q. Hu, and H. Ling, “Detection and tracking meet drones challenge,”IEEE TPAMI, vol. 44, no. 11, pp. 7380–7399, 2022
work page 2022
-
[2]
Anti-uav410: A thermal infrared benchmarkandcustomizedschemefortrackingdronesinthewild,
B. Huang, J. Li, J. Chen, G. Wang, J. Zhao, and T. Xu, “Anti-uav410: A thermal infrared benchmarkandcustomizedschemefortrackingdronesinthewild,”IEEETPAMI,vol.46, no. 5, pp. 2852–2865, 2024
work page 2024
-
[3]
Webuav-3m: A benchmark for unveiling the power of million-scale deep uav tracking,
C.Zhang,G.Huang,L.Liu,S.Huang,Y.Yang,X.Wan,S.Ge,andD.Tao,“Webuav-3m: A benchmark for unveiling the power of million-scale deep uav tracking,”IEEE TPAMI, vol. 45, no. 7, pp. 9186–9205, 2023
work page 2023
-
[4]
Overview on autonomous aircraft technology and its application to low-altitude economy,
C. Lin, M. Zhiqiang, W. Xiangke, C. Mou, D. Haibin, and W. Yaonan, “Overview on autonomous aircraft technology and its application to low-altitude economy,” inRobot, vol. 47, no. 3, 2025, pp. 470–496
work page 2025
-
[5]
ATRNet-STAR: A large dataset and benchmark towards remote sensing object recognition in the wild,
Y. Liu, W. Li, L. Liu, J. Zhou, B. Peng, Y. Song, X. Xiong, W. Yang, T. Liu, Z. Liu, and X. Li, “ATRNet-STAR: A large dataset and benchmark towards remote sensing object recognition in the wild,”IEEE TPAMI, pp. 1–18, 2026
work page 2026
-
[6]
Rgb-t object tracking: Benchmark and baseline,
C. Li, X. Liang, Y. Lu, N. Zhao, and J. Tang, “Rgb-t object tracking: Benchmark and baseline,”PR, vol. 96, p. 106977, 2019
work page 2019
-
[7]
Visible-thermal uav tracking: A large- scale benchmark and new baseline,
P. Zhang, J. Zhao, D. Wang, H. Lu, and X. Ruan, “Visible-thermal uav tracking: A large- scale benchmark and new baseline,” inCVPR, 2022, pp. 8886–8895
work page 2022
-
[8]
Anti-uav: A large-scale benchmark for vision-based uav tracking,
N. Jiang, K. Wang, X. Peng, X. Yu, Q. Wang, J. Xing, G. Li, G. Guo, Q. Ye, J. Jiaoet al., “Anti-uav: A large-scale benchmark for vision-based uav tracking,”IEEE TMM, vol. 25, pp. 486–500, 2021
work page 2021
-
[9]
Material based object tracking in hyperspectral videos,
F. Xiong, J. Zhou, and Y. Qian, “Material based object tracking in hyperspectral videos,” IEEE TIP, vol. 29, pp. 3719–3733, 2020
work page 2020
-
[10]
Z. Liu, Y. Zhong, X. Wang, M. Shu, and L. Zhang, “Unsupervised deep hyperspectral video target tracking and high spectral-spatial-temporal resolution (h 3) benchmark dataset,”IEEE TGRS, vol. 60, pp. 1–14, 2021
work page 2021
-
[11]
Must: The first dataset and unified framework for multispectral uav single object tracking,
H. Qin, T. Xu, T. Li, Z. Chen, T. Feng, and J. Li, “Must: The first dataset and unified framework for multispectral uav single object tracking,” inCVPR, 2025, pp. 16882– 16891
work page 2025
-
[12]
A benchmark and simulator for uav tracking
M. Mueller, N. Smith, and B. Ghanem, “A benchmark and simulator for uav tracking",” inECCV, 2016, pp. 445–461
work page 2016
-
[13]
Visualobjecttrackingforunmannedaerialvehicles:Abenchmark and new motion models,
S.LiandD.-Y.Yeung,“Visualobjecttrackingforunmannedaerialvehicles:Abenchmark and new motion models,” inAAAI, vol. 31, no. 1, 2017
work page 2017
-
[14]
Visdrone-det2021: The vision meets drone object detection challenge results,
Y. Cao, Z. He, L. Wang, W. Wang, Y. Yuan, D. Zhang, J. Zhang, P. Zhu, L. Van Gool, J. Hanet al., “Visdrone-det2021: The vision meets drone object detection challenge results,” inICCV, 2021, pp. 2847–2854
work page 2021
-
[15]
The unmanned aerial vehicle benchmark: Object detection and tracking,
D. Du, Y. Qi, H. Yu, Y. Yang, K. Duan, G. Li, W. Zhang, Q. Huang, and Q. Tian, “The unmanned aerial vehicle benchmark: Object detection and tracking,” inECCV, 2018, pp. 370–386
work page 2018
-
[16]
Learningsocialetiquette:Human trajectory understanding in crowded scenes,
A.Robicquet,A.Sadeghian,A.Alahi,andS.Savarese,“Learningsocialetiquette:Human trajectory understanding in crowded scenes,” inECCV, 2016, pp. 549–565
work page 2016
-
[17]
Adaptive inattentional framework for video object detection with reward-conditional training,
A. Rodriguez-Ramos, J. Rodriguez-Vazquez, C. Sampedro, and P. Campoy, “Adaptive inattentional framework for video object detection with reward-conditional training,” IEEE Access, vol. 8, pp. 124451–124466, 2020
work page 2020
-
[18]
Tju-dhd: A diverse high-resolution dataset for object detection,
Y. Pang, J. Cao, Y. Li, J. Xie, H. Sun, and J. Gong, “Tju-dhd: A diverse high-resolution dataset for object detection,”IEEE TIP, vol. 30, pp. 207–219, 2020
work page 2020
-
[19]
Multispectralpedestriandetection: Benchmark dataset and baseline,
S.Hwang,J.Park,N.Kim,Y.Choi,andI.SoKweon,“Multispectralpedestriandetection: Benchmark dataset and baseline,” inCVPR, 2015, pp. 1037–1045
work page 2015
-
[20]
Multispectral fusion for object detection with cyclic fuse-and-refine blocks,
H. Zhang, E. Fromont, S. Lefevre, and B. Avignon, “Multispectral fusion for object detection with cyclic fuse-and-refine blocks,” inICIP, 2020, pp. 276–280
work page 2020
-
[21]
Llvip: A visible-infrared paired dataset for low-light vision,
X. Jia, C. Zhu, M. Li, W. Tang, and W. Zhou, “Llvip: A visible-infrared paired dataset for low-light vision,” inICCV, 2021, pp. 3496–3504
work page 2021
-
[22]
Lasher: A large-scale high- diversity benchmark for rgbt tracking,
C. Li, W. Xue, Y. Jia, Z. Qu, B. Luo, J. Tang, and D. Sun, “Lasher: A large-scale high- diversity benchmark for rgbt tracking,”IEEE TIP, vol. 31, pp. 392–404, 2021
work page 2021
-
[23]
Visible-thermaltinyobjectdetection:Abenchmarkdatasetandbaselines,
X. Ying, C. Xiao, W. An, R. Li, X. He, B. Li, X. Cao, Z. Li, Y. Wang, M. Huet al., “Visible-thermaltinyobjectdetection:Abenchmarkdatasetandbaselines,”IEEETPAMI, vol. 47, no. 7, pp. 6088–6096, 2025
work page 2025
-
[24]
Vehicle detection in aerial imagery: A small target detection benchmark,
S. Razakarivony and F. Jurie, “Vehicle detection in aerial imagery: A small target detection benchmark,”JVCIR, vol. 34, pp. 187–203, 2016
work page 2016
-
[25]
Semi-supervised hyperspectral object detection challenge results-pbvs 2022,
A. Rangnekar, Z. Mulhollan, A. Vodacek, M. Hoffman, A. D. Sappa, E. Blasch, J. Yu, L. Zhang, S. Du, H. Changet al., “Semi-supervised hyperspectral object detection challenge results-pbvs 2022,” inCVPRW, 2022, pp. 390–398
work page 2022
-
[26]
Figvcl: Fine-grained benchmark and method for video copy localization,
W. Luo, Y. Liu, B. Li, W. Hu, and S. Maybank, “Figvcl: Fine-grained benchmark and method for video copy localization,”IEEE TPAMI, vol. 47, no. 11, pp. 10457–10474, 2025
work page 2025
-
[27]
H. Dong, M. Liu, K. Zhou, E. Chatzi, J. Kannala, C. Stachniss, and O. Fink, “Advances in multimodal adaptation and generalization: From traditional approaches to foundation models,”IEEE TPAMI, pp. 1–20, 2026
work page 2026
-
[28]
Faster r-cnn: Towards real-time object detection with region proposal networks,
S. Ren, K. He, R. Girshick, and J. Sun, “Faster r-cnn: Towards real-time object detection with region proposal networks,”NeurIPS, vol. 28, 2015
work page 2015
-
[29]
Fully convolutional one-stage object detection,
Z. Tian, C. Shen, H. Chen, and T. He, “Fully convolutional one-stage object detection,” inICCV, 2019, pp. 9626–9635
work page 2019
-
[30]
Motion and appearance decoupling representation for event cameras,
N. Chen, B. Li, Y. Wang, X. Ying, L. Wang, C. Zhang, Y. Guo, M. Li, and W. An, “Motion and appearance decoupling representation for event cameras,”IEEE TIP, 2025. SUBMITTED TO IEEE TRANSACTIONS ON PATTERN ANAL YSIS AND MACHINE INTELLIGENCE 9
work page 2025
-
[31]
X. Zhou, D. Wang, and P. Krähenbühl, “Objects as points,”arXiv, 2019, arXiv:1904.07850
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[32]
Deformable DETR: Deformable Transformers for End-to-End Object Detection
X. Zhu, W. Su, L. Lu, B. Li, X. Wang, and J. Dai, “Deformable detr: Deformable transformers for end-to-end object detection,”arXiv, 2020, arXiv:2010.04159
work page internal anchor Pith review Pith/arXiv arXiv 2020
-
[33]
DINO: DETR with Improved DeNoising Anchor Boxes for End-to-End Object Detection
H. Zhang, F. Li, S. Liu, L. Zhang, H. Su, J. Zhu, L. M. Ni, and H.-Y. Shum, “Dino: Detr with improved denoising anchor boxes for end-to-end object detection,”arXiv, 2022, arXiv:2203.03605
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[34]
Slicingaidedhyperinferenceandfine-tuning for small object detection,
F.C.Akyon,S.O.Altinuc,andA.Temizel,“Slicingaidedhyperinferenceandfine-tuning for small object detection,” inIEEE ICIP, 2022, pp. 966–970
work page 2022
-
[35]
Parameter-inverted image pyramid networks for visual perception and multimodal understanding,
Z. Wang, X. Zhu, X. Yang, G. Luo, H. Li, C. Tian, W. Dou, J. Ge, L. Lu, Y. Qiao, and J. Dai, “Parameter-inverted image pyramid networks for visual perception and multimodal understanding,”IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 47, no. 11, pp. 10142–10159, 2025
work page 2025
-
[36]
Direction-coded temporal u-shape module for multiframe infrared small target detection,
R. Li, W. An, C. Xiao, B. Li, Y. Wang, M. Li, and Y. Guo, “Direction-coded temporal u-shape module for multiframe infrared small target detection,”IEEE TNNLS, vol. 36, no. 1, pp. 555–568, 2025
work page 2025
-
[37]
Specdetr: A transformer-based hyperspectral point object detection network,
Z. Li, W. An, G. Guo, L. Wang, Y. Wang, and Z. Lin, “Specdetr: A transformer-based hyperspectral point object detection network,”ISPRS, vol. 226, pp. 221–246, 2025
work page 2025
-
[38]
Cascade r-cnn: Delving into high quality object detection,
Z. Cai and N. Vasconcelos, “Cascade r-cnn: Delving into high quality object detection,” inCVPR, 2018, pp. 6154–6162
work page 2018
-
[39]
Tood: Task-aligned one-stage object detection,
C. Feng, Y. Zhong, Y. Gao, M. R. Scott, and W. Huang, “Tood: Task-aligned one-stage object detection,” inICCV, 2021, pp. 3490–3499
work page 2021
-
[40]
G. Jocher, A. Chaurasia, and J. Qiu, “Ultralytics YOLO,” 2023. [Online]. Available: https://github.com/ultralytics/ultralytics
work page 2023
-
[41]
Yolov9: Learning what you want to learn using programmable gradient information,
C.-Y. Wang, I.-H. Yeh, and H.-Y. Mark Liao, “Yolov9: Learning what you want to learn using programmable gradient information,” inECCV, 2024, pp. 1–21
work page 2024
-
[42]
Anchordetr:Querydesignfortransformer-based detector,
Y.Wang,X.Zhang,T.Yang,andJ.Sun,“Anchordetr:Querydesignfortransformer-based detector,” inAAAI, vol. 36, no. 3, 2022, pp. 2567–2575
work page 2022
-
[43]
Oriented tiny object detection: A dataset, benchmark, and dynamic unbiased learning,
C. Xu, R. Zhang, W. Yang, H. Zhu, F. Xu, J. Ding, and G.-S. Xia, “Oriented tiny object detection: A dataset, benchmark, and dynamic unbiased learning,”IEEE TPAMI, vol. 48, no. 3, pp. 3167–3184, 2026
work page 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.