Modeling and Control of a Pneumatic Morphing Soft Quadrotor based on the SOFA Framework for Dynamic Soft Robotic Simulation
Pith reviewed 2026-05-25 06:16 UTC · model grok-4.3
The pith
SOFA-based FEM framework for dynamic simulation and PI control of a pneumatic morphing soft quadrotor that preserves traditional quadrotor dynamics.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The proposed SOFA based finite element method for the soft body modeling preserves the physical interpretability and control structure of traditional quadrotor dynamics, while capturing the complex, time-varying behavior of pneumatically actuated soft arms.
Load-bearing premise
The tetrahedral mesh discretization following an elastic material law produces internal forces adequate to the real dynamic behavior of the pneumatic arms (stated in the modeling description).
Figures






read the original abstract
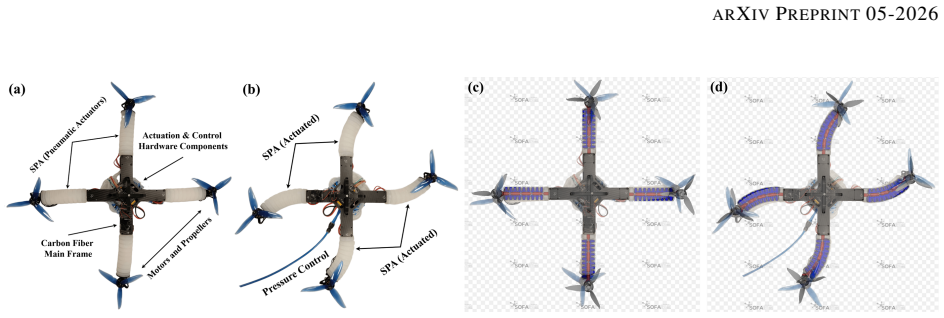
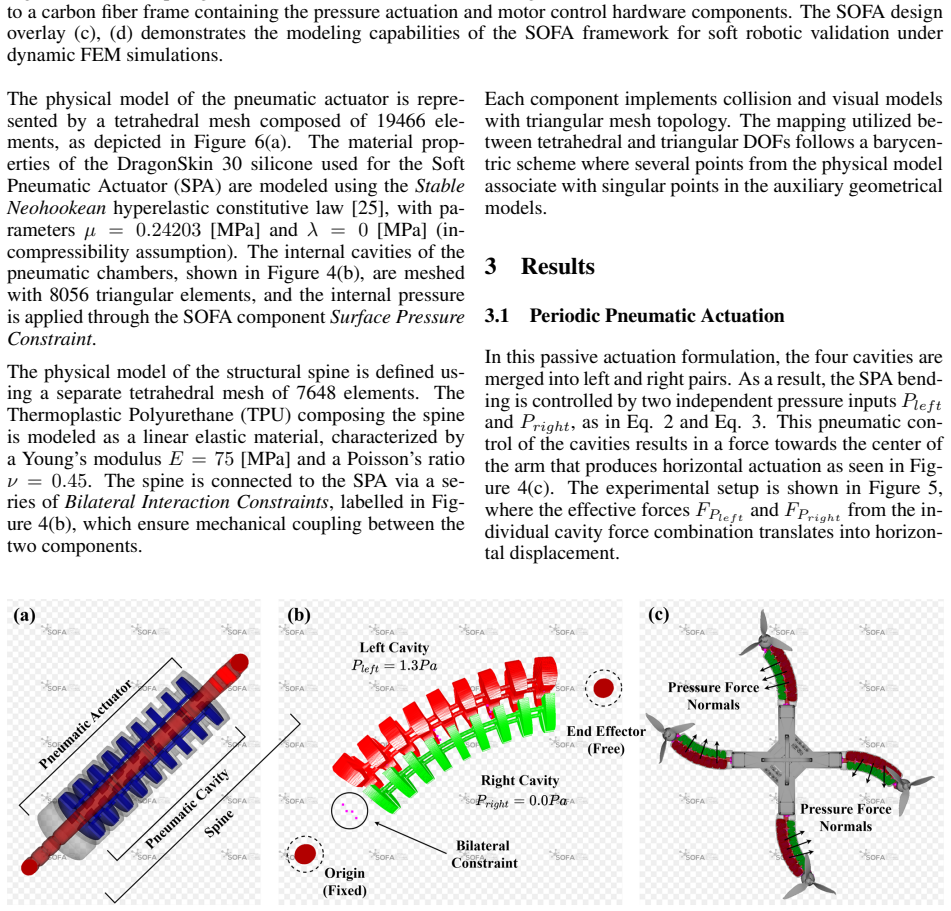
This article presents a novel SOFA based finite element method for the soft body modeling and the corresponding dynamic simulation and control of a pneumatic morphing soft quadrotor. The proposed modeling preserves the physical interpretability and control structure of traditional quadrotor dynamics, while capturing the complex, time-varying behavior of pneumatically actuated soft arms. In SOFA, the soft pneumatically actuated arms are discretized as a tetrahedral mesh following an elastic material law that produces internal forces adequate to the real dynamic behavior of the body. Pneumatic actuation governed by both periodic and error-based control signals is applied within the internal cavities to analyze the morphing capability. Finally, a proportional-integral controller is proposed to study the controlled dynamic behavior and morphing capabilities of the pneumatic arm, wherein the pneumatic actuation to the soft arm is controlled to achieve the desired target position. The simulation results show the effectiveness of the proposed novel modeling framework and the related controller design.
Editorial analysis
A structured set of objections, weighed in public.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The tetrahedral mesh discretization following an elastic material law produces internal forces adequate to the real dynamic behavior of the pneumatic arms.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.