Benchmarking Empirical and Learning-Based Approaches for Feedforward Steering Control in Autonomous Racing
Pith reviewed 2026-05-21 04:17 UTC · model grok-4.3
The pith
A polynomial surface empirical controller outperforms learning-based methods for feedforward steering in closed-loop racing simulations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
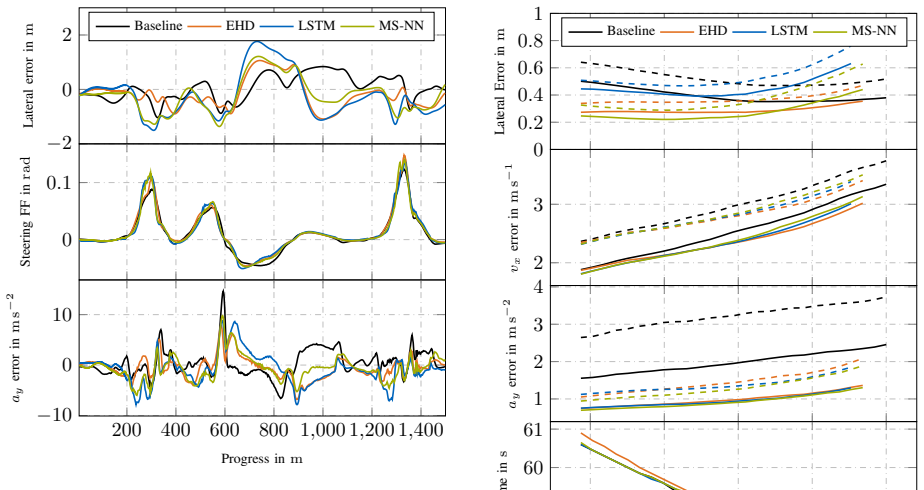
The proposed EHD approach achieves the best overall closed-loop robustness and lap time. Although learning-based controllers exhibit the lowest open-loop prediction errors, this does not translate into superior path tracking performance or lap times even after iterative fine-tuning. The results highlight the necessity of evaluating feedforward strategies within the complete trajectory planning and control software stack rather than in isolation.
What carries the argument
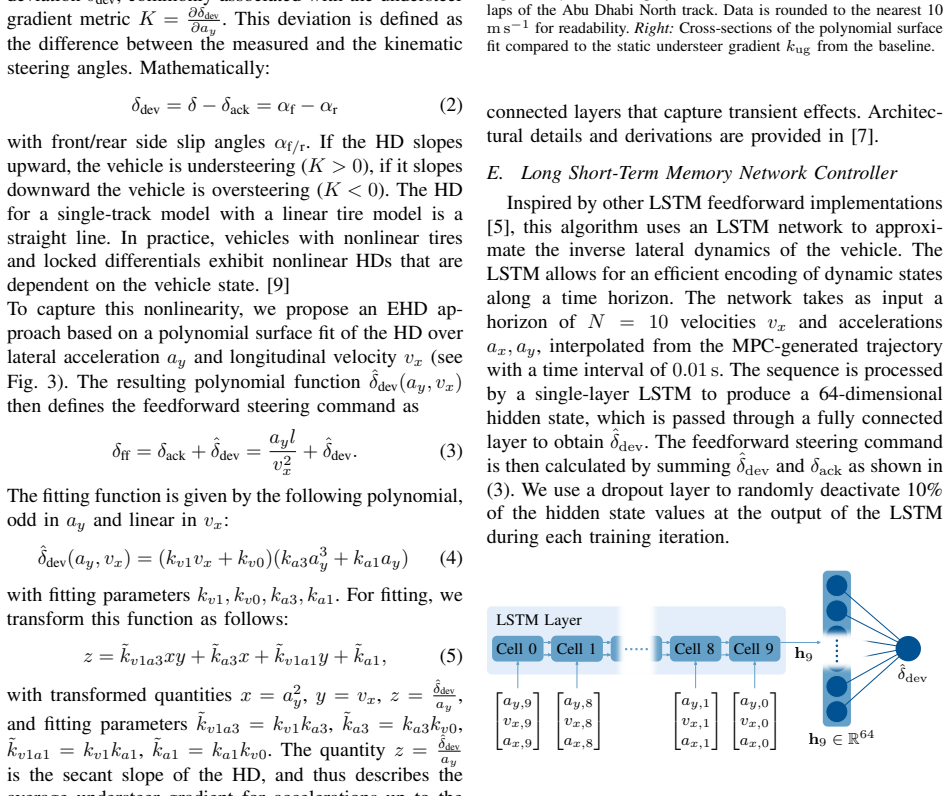
The EHD formulation, a polynomial surface fit that captures velocity-dependent nonlinear steering behavior with minimal parametrization.
If this is right
- Open-loop prediction accuracy alone does not predict closed-loop path tracking success or lap time gains.
- Feedforward steering performance must be assessed inside the integrated trajectory planning and control pipeline.
- A low-parameter polynomial surface can model nonlinear steering dynamics effectively enough to outperform data-driven alternatives in full-system tests.
- Learning-based controllers may require further integration adjustments before their open-loop edge appears in closed-loop racing.
Where Pith is reading between the lines
- The open-versus-closed-loop gap suggests feedback controllers compensate differently for each feedforward prediction type.
- Similar benchmarking protocols could be applied to throttle or brake feedforward modules in the same racing stack.
- If the simulator-reality gap proves small, the EHD method offers a lightweight alternative to retraining neural controllers for new tracks.
Load-bearing premise
The high-fidelity double-track vehicle dynamics simulator accurately represents the real-world dynamics and conditions of the Abu Dhabi Autonomous Racing League competition.
What would settle it
Running the four controllers on a physical vehicle during an actual Abu Dhabi Autonomous Racing League event and comparing measured lap times plus path-tracking error statistics would determine whether the EHD method retains its closed-loop advantage.
Figures







read the original abstract
Feedforward steering control is a key component of hierarchical control architectures for autonomous racing. The goal is to reduce steering corrections from the feedback controllers by predicting the vehicle's inverse lateral dynamics. This paper presents a systematic benchmark of two learning-based and two empirical (analytical) feedforward steering controllers. We introduce a new \acf{ehd} formulation based on a polynomial surface fit that captures velocity-dependent nonlinear steering behavior with minimal parametrization. We test the feedforward controllers in a high-fidelity simulation framework based on the real-world Abu Dhabi Autonomous Racing League competition, using a high-fidelity double-track vehicle dynamics simulator. Open-loop evaluation shows that the learning-based controllers achieve the lowest prediction errors; however, closed-loop testing reveals that this improved accuracy does not translate into superior path tracking performance or lap times, even after iterative fine-tuning. In contrast, the proposed EHD approach achieves the best overall closed-loop robustness and lap time, highlighting the necessity of evaluating feedforward strategies within the complete trajectory planning and control software stack. Our code is available at https://github.com/TUMRT/steering_ff_control.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper benchmarks two learning-based and two empirical feedforward steering controllers for autonomous racing, introducing a new EHD polynomial surface fit to capture velocity-dependent nonlinear steering with minimal parameters. Open-loop evaluation in a high-fidelity double-track simulator (modeled on the Abu Dhabi Autonomous Racing League) shows learning-based methods with the lowest prediction errors, but closed-loop tests reveal that the EHD approach yields the best robustness and lap times. This leads to the conclusion that feedforward strategies must be evaluated within the full trajectory planning and control stack rather than by open-loop accuracy alone. Code is released at https://github.com/TUMRT/steering_ff_control.
Significance. If the simulation-based results hold, the work usefully demonstrates that lower open-loop prediction error does not guarantee superior closed-loop path tracking or lap times in autonomous racing. This provides concrete evidence for the value of full-stack evaluation over isolated controller benchmarking. The public code release supports reproducibility and is a clear strength.
major comments (1)
- The closed-loop performance ranking (EHD superiority in robustness and lap time) is generated entirely inside the high-fidelity double-track simulator. The manuscript provides no validation of this simulator against real Abu Dhabi Autonomous Racing League vehicle data (e.g., measured lateral accelerations, tire force curves, or velocity-dependent cornering stiffness). Because any systematic mismatch in these dynamics would alter the observed ranking between empirical and learning-based methods, this is load-bearing for the central claim that full-stack evaluation is necessary.
minor comments (2)
- Add explicit details on feedback controller tuning procedures, the precise closed-loop metrics (e.g., RMS lateral error, peak error), and any data exclusion criteria used in the reported experiments.
- Clarify the exact definition and fitting procedure for the EHD polynomial surface (including how velocity dependence is encoded) in the main text rather than relying solely on the code repository.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the single major comment below and propose targeted revisions to strengthen the presentation of our simulation-based results.
read point-by-point responses
-
Referee: The closed-loop performance ranking (EHD superiority in robustness and lap time) is generated entirely inside the high-fidelity double-track simulator. The manuscript provides no validation of this simulator against real Abu Dhabi Autonomous Racing League vehicle data (e.g., measured lateral accelerations, tire force curves, or velocity-dependent cornering stiffness). Because any systematic mismatch in these dynamics would alter the observed ranking between empirical and learning-based methods, this is load-bearing for the central claim that full-stack evaluation is necessary.
Authors: We agree that the absence of direct validation against real Abu Dhabi Autonomous Racing League vehicle data is a limitation. The high-fidelity double-track model uses parameters drawn from publicly available competition specifications and standard tire models, but the manuscript does not present comparisons to measured lateral accelerations, tire force curves, or velocity-dependent cornering stiffness. Consequently, the specific closed-loop ranking could shift under different dynamic assumptions. At the same time, the central claim—that open-loop accuracy alone is insufficient to predict closed-loop behavior within a full planning-and-control stack—remains valid as a qualitative result inside the simulated environment. To address the concern we will add (i) an explicit paragraph in the Simulation Framework section listing all parameter sources and modeling assumptions and (ii) a short limitations paragraph in the Conclusions that states the simulation-only nature of the ranking and the value of future real-vehicle confirmation. These changes will make the scope of the claims precise while preserving the paper’s main contribution. revision: partial
Circularity Check
No circularity: claims rest on direct simulator measurements, not self-referential fits or derivations
full rationale
The paper reports open-loop prediction errors and closed-loop lap times/robustness from explicit simulation runs inside a high-fidelity double-track model. The EHD polynomial surface is introduced as a new empirical fit and then evaluated on the same simulator; its reported superiority is an observed outcome rather than a quantity forced by the fit itself or by any self-citation chain. No equations or sections reduce a claimed result to a parameter that was fitted to the target metric. The work is therefore self-contained against external benchmarks (the simulator runs) and receives the default non-finding.
Axiom & Free-Parameter Ledger
free parameters (1)
- Polynomial coefficients in EHD surface fit
axioms (1)
- domain assumption Double-track vehicle dynamics in the simulator match real racing car behavior under competition conditions.
Reference graph
Works this paper leans on
-
[1]
Autonomous vehicles on the edge: A survey on autonomous vehicle racing,
J. Betzet al., “Autonomous vehicles on the edge: A survey on autonomous vehicle racing,”IEEE Open J. Intell. Transp. Syst., vol. 3, pp. 458–488, 2022
work page 2022
-
[2]
Tube model predictive control for an autonomous race car,
A. Wischnewskiet al., “Tube model predictive control for an autonomous race car,”V ehicle Syst. Dyn., vol. 60, no. 9, pp. 3151– 3173, 2021
work page 2021
-
[3]
Neural network vehicle models for high- performance automated driving,
N. A. Spielberget al., “Neural network vehicle models for high- performance automated driving,”Sci. Robot., vol. 4, no. 28, p. eaaw1975, 2019
work page 2019
-
[4]
M. Piccininiet al., “Kineto-dynamical planning and accurate execution of minimum-time maneuvers on three-dimensional circuits,” in2025 IEEE International Conference on Robotics and Automation (ICRA), 2025, pp. 1–7
work page 2025
-
[5]
——, “A predictive neural hierarchical framework for on-line time-optimal motion planning and control of black-box vehicle models,”V eh. Syst. Dyn., vol. 61, no. 1, pp. 83–110, 2023
work page 2023
-
[6]
A two-layer controller for lateral path tracking control of autonomous vehicles,
Z. Heet al., “A two-layer controller for lateral path tracking control of autonomous vehicles,”Sensors, vol. 20, no. 13, p. 3689, 2020
work page 2020
-
[7]
Model-structured neural networks to control the steering dynamics of autonomous race cars,
M. Piccininiet al., “Model-structured neural networks to control the steering dynamics of autonomous race cars,” in2025 IEEE 28th International Conference on Intelligent Transportation Sys- tems (ITSC), 2025, pp. 4129–4136
work page 2025
-
[8]
Abe,V ehicle Handling Dynamics: Theory and Application
M. Abe,V ehicle Handling Dynamics: Theory and Application. Elsevier Science, 2009
work page 2009
-
[9]
Critical review of han- dling diagram and understeer gradient for vehicles with locked differential,
F. Frendo, G. Greco, and M. Guiggiani, “Critical review of han- dling diagram and understeer gradient for vehicles with locked differential,”V ehicle Syst. Dyn., vol. 44, no. 6, pp. 431–447, 2006
work page 2006
-
[10]
Motion planning and control for multi vehicle autonomous racing at high speeds,
A. Rajiet al., “Motion planning and control for multi vehicle autonomous racing at high speeds,” inIEEE Int. Conf. Intell. Transp. Syst. (ITSC), 2022
work page 2022
-
[11]
Optimization-based hierarchical motion planning for autonomous racing,
J. L. V ´azquezet al., “Optimization-based hierarchical motion planning for autonomous racing,” inIEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2020
work page 2020
-
[12]
F. Jahnckeet al., “Differentiable weights-varying nonlinear mpc via gradient-based policy learning: An autonomous vehicle guid- ance example,”IEEE Robot. Autom. Lett., vol. 11, no. 3, pp. 3724–3731, 2026
work page 2026
-
[13]
Stochastic optimal control for autonomous driving applications via polynomial chaos expansions,
P. Listov, J. Schwarz, and C. N. Jones, “Stochastic optimal control for autonomous driving applications via polynomial chaos expansions,”Optim. Control Appl. Methods, vol. 45, no. 1, pp. 3–28, 2023
work page 2023
-
[14]
Analysis and control of high sideslip manoeuvres,
C. V oser, R. Y . Hindiyeh, and J. C. Gerdes, “Analysis and control of high sideslip manoeuvres,”V ehicle Syst. Dyn., vol. 48, no. sup1, pp. 317–336, 2010
work page 2010
-
[15]
Estimation of tire forces and torques via nonlinear suspension models and optimal control,
G. Corradiniet al., “Estimation of tire forces and torques via nonlinear suspension models and optimal control,”J. Comput. Nonlin. Dyn., vol. 21, no. 4, p. 041002, 2025
work page 2025
-
[16]
Neural network model predictive motion control applied to automated driving with unknown friction,
N. A. Spielberg, M. Brown, and J. C. Gerdes, “Neural network model predictive motion control applied to automated driving with unknown friction,”IEEE Trans. Control Syst. Technol., vol. 30, no. 5, pp. 1934–1945, 2022
work page 1934
-
[17]
Coupled longitudinal and lateral control of a vehicle using deep learning,
G. Devineauet al., “Coupled longitudinal and lateral control of a vehicle using deep learning,” inIEEE Int. Conf. Intell. Transp. Syst. (ITSC), 2018
work page 2018
-
[18]
Anycar to anywhere: Learning universal dynam- ics model for agile and adaptive mobility,
W. Xiaoet al., “Anycar to anywhere: Learning universal dynam- ics model for agile and adaptive mobility,” inIEEE Int. Conf. Robot. Autom. (ICRA), 2025
work page 2025
-
[19]
Z. Gaoet al., “An integrated framework for autonomous driving planning and tracking based on nnmpc considering road surface variations,”IEEE Trans. Intell. V eh., 2024
work page 2024
-
[20]
Model predictive control with learned vehicle dynamics for autonomous vehicle path tracking,
M. Rokonuzzamanet al., “Model predictive control with learned vehicle dynamics for autonomous vehicle path tracking,”IEEE Access, vol. 9, pp. 128 233–128 249, 2021
work page 2021
-
[21]
Learning-based on-track system identification for scaled autonomous racing in under a minute,
O. Dikiciet al., “Learning-based on-track system identification for scaled autonomous racing in under a minute,”IEEE Robot. Autom. Lett., 2025
work page 2025
-
[22]
Residual learning towards high-fidelity vehicle dynamics modeling with transformer,
J. Miaoet al., “Residual learning towards high-fidelity vehicle dynamics modeling with transformer,”IEEE Robot. Autom. Lett., 2025
work page 2025
-
[23]
M. Raissi, P. Perdikaris, and G. Karniadakis, “Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations,”J. Comput. Phys., vol. 378, pp. 686–707, 2019
work page 2019
-
[24]
When physics meets machine learning: a survey of physics-informed machine learning,
C. Menget al., “When physics meets machine learning: a survey of physics-informed machine learning,”Mach. Learn. Comput. Sci. Eng., vol. 1, no. 1, p. 20, 2025
work page 2025
-
[25]
Fast and accurate prediction of vehicle dynamics using physics-informed neural networks,
H. Zeipelet al., “Fast and accurate prediction of vehicle dynamics using physics-informed neural networks,” 2024
work page 2024
-
[26]
A road friction-aware anti-lock braking system based on model-structured neural networks,
M. Piccininiet al., “A road friction-aware anti-lock braking system based on model-structured neural networks,”IEEE Open J. Intell. Transp. Syst., vol. 6, pp. 522–536, 2025
work page 2025
-
[27]
A mental simulation approach for learning neural-network predictive control (in self-driving cars),
M. Da Lioet al., “A mental simulation approach for learning neural-network predictive control (in self-driving cars),”IEEE Access, vol. 8, pp. 192 041–192 064, 2020
work page 2020
-
[28]
A physics-driven artificial agent for online time-optimal vehicle motion planning and control,
M. Piccininiet al., “A physics-driven artificial agent for online time-optimal vehicle motion planning and control,”IEEE Access, vol. 11, pp. 46 344–46 372, 2023
work page 2023
-
[29]
S. A. Faroughiet al., “Physics-guided, physics-informed, and physics-encoded neural networks and operators in scientific com- puting: Fluid and solid mechanics,”J. Comput. Inf. Sci. Eng., vol. 24, no. 4, p. 040802, 2024
work page 2024
-
[30]
Head-to-Head autonomous racing at the limits of handling in the A2RL challenge 2,
S. Hoffmannet al., “Head-to-Head autonomous racing at the limits of handling in the A2RL challenge 2,” 2026
work page 2026
-
[31]
Longitudinal control for autonomous racing with combustion engine vehicles,
P. Pitschiet al., “Longitudinal control for autonomous racing with combustion engine vehicles,” inIEEE Intell. V eh. Symp. (IV), 2025
work page 2025
-
[32]
Analyzing the impact of simulation fidelity on the evaluation of autonomous driving motion control,
S. Sagmeisteret al., “Analyzing the impact of simulation fidelity on the evaluation of autonomous driving motion control,” inIEEE Intell. V eh. Symp. (IV). IEEE, 2024
work page 2024
-
[33]
F. Werneret al., “Gripmap: An efficient, spatially resolved constraint framework for offline and online trajectory planning in autonomous racing,” inIEEE Intell. V eh. Symp. (IV). IEEE, 2025
work page 2025
-
[34]
A unified approach to interpreting model predictions,
S. M. Lundberg and S.-I. Lee, “A unified approach to interpreting model predictions,” inAdv. Neural Inf. Process. Syst. (NeurIPS), I. Guyonet al., Eds., vol. 30. Curran Associates, Inc., 2017
work page 2017
-
[35]
Rslcpp – deterministic simulations using ros 2,
S. Sagmeisteret al., “Rslcpp – deterministic simulations using ros 2,”IEEE Robotics and Automation Practice, 2026, submitted
work page 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.