Safety-Critical Control for Smoothed Implicit Contact Dynamics
Pith reviewed 2026-05-21 04:08 UTC · model grok-4.3
The pith
Robust margin on approximated contact forces prevents safety violations in smoothed implicit dynamics.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
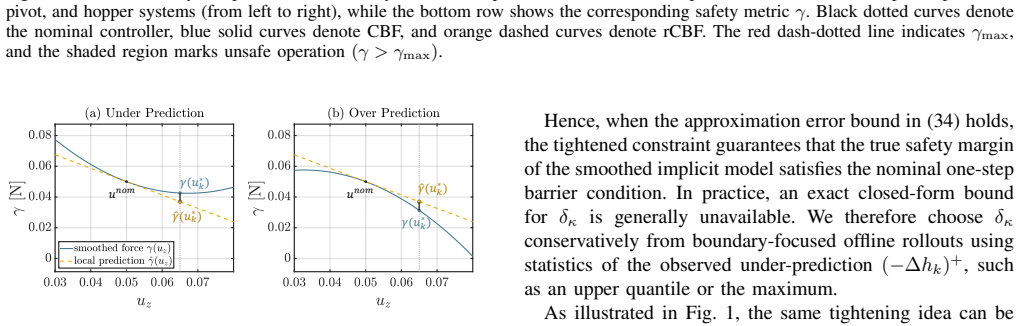
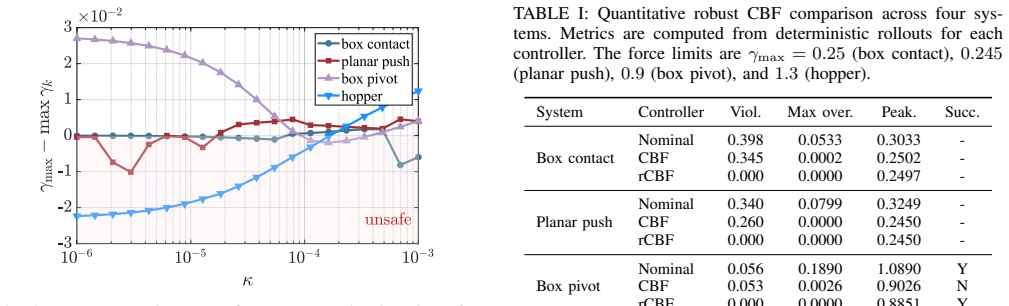
The central claim is that constraint violations can be non-monotonic in the smoothing parameter kappa. Smaller kappa reduces force-approximation error but does not necessarily improve safety. Boundary-focused rollouts select kappa by comparing the safety margin with the approximation error. A discrete-time CBF is then constructed from a first-order Taylor approximation of the implicitly defined contact force and augmented with a fixed robust margin to account for under-prediction, eliminating force violations observed under standard CBFs in simulations of four contact-rich systems.
What carries the argument
Boundary-focused rollouts to screen the smoothing parameter kappa together with a discrete-time CBF safety constraint derived from first-order Taylor approximation of the implicitly defined contact force and augmented by a fixed robust margin.
If this is right
- The method supports gradient-based planning and control for contact-rich tasks without requiring predefined mode sequences.
- Standard CBF designs produce force violations that the augmented margin eliminates.
- Non-monotonicity in kappa means safety performance cannot be improved simply by decreasing the smoothing parameter.
- The approach extends safety filtering to smoothed implicit dynamics while preserving differentiability.
Where Pith is reading between the lines
- The same screening-plus-margin pattern could stabilize safety filters for other relaxed complementarity problems in optimization-based control.
- An adaptive rather than fixed margin might reduce conservatism once the distribution of approximation errors is characterized.
- Hardware experiments on the same four systems would test whether unmodeled effects exceed the margin chosen from simulation.
Load-bearing premise
The fixed robust margin added to the safety constraint is sufficient to cover possible force under-prediction arising from the first-order Taylor approximation of the implicitly defined contact force.
What would settle it
Run the four contact-rich simulations with the proposed controller and observe whether any force violation still occurs when the actual contact force exceeds the first-order approximation by more than the chosen robust margin.
Figures






read the original abstract
Smoothed implicit contact dynamics enables gradient-based planning and control for contact-rich tasks without predefined mode sequences. However, safety-critical control remains challenging because implicit contact dynamics makes safety-filter design nontrivial. The smoothing parameter $\kappa$ relaxes contact complementarity constraints, which makes the dynamics smooth but affects the contact force. This paper provides a method for bounding the actual contact force despite the use of relaxed complementarity constraints. We show that constraint violations can be non-monotonic in $\kappa$. Smaller $\kappa$ reduces force-approximation error, but it does not necessarily improve safety performance. To address this issue, we introduce boundary-focused rollouts to screen $\kappa$ by comparing the safety margin with the approximation error. We then develop a discrete-time control barrier function (CBF) framework based on a first-order Taylor approximation of the implicitly defined contact force. To account for possible force under-prediction, we augment the resulting safety constraint with a fixed robust margin. Simulations on four contact-rich systems show that the proposed method eliminates force violations observed under a standard CBF.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops a safety-critical control method for robots with smoothed implicit contact dynamics. It constructs a discrete-time control barrier function (CBF) using a first-order Taylor approximation of the contact force obtained from the relaxed complementarity constraints, augments the resulting safety constraint with a fixed robust margin to compensate for possible under-prediction, and introduces boundary-focused rollouts to screen the smoothing parameter κ because force-approximation error is observed to be non-monotonic in κ. Simulations on four contact-rich systems are reported to show that the method eliminates the force violations that appear under a standard CBF.
Significance. If the fixed robust margin can be shown to enclose the linearization error, the approach would offer a practical route to safe gradient-based control for contact-rich tasks that avoids explicit mode sequencing. The empirical demonstration across multiple systems and the explicit handling of the non-monotonic κ effect are concrete strengths that could influence subsequent work on implicit-dynamics CBFs.
major comments (2)
- [CBF framework] CBF framework section: the safety constraint is augmented by a constant robust margin to cover possible under-prediction from the first-order Taylor approximation of the implicitly defined contact force, yet no explicit remainder bound (Lipschitz constant of the implicit map, higher-order term estimate, or state-region enclosure) is supplied that would guarantee the chosen scalar covers the worst-case error.
- [κ screening] κ screening procedure: boundary-focused rollouts are used to compare safety margin against approximation error, but the interaction between the selected κ and the fixed robust margin is not analyzed; it remains unclear whether the combined construction still guarantees forward invariance when the linearization error is non-monotonic.
minor comments (2)
- [Abstract] The abstract states that simulations were performed on four contact-rich systems but does not name the systems or report quantitative metrics (e.g., maximum violation magnitude or fraction of violating timesteps) that would allow direct comparison with the standard CBF baseline.
- [Notation] Notation for the approximated contact force and the added robust margin should be introduced with an explicit equation showing precisely how the margin modifies the discrete-time CBF inequality.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and for highlighting both the practical strengths and the theoretical gaps in our approach. We address each major comment below, indicating planned revisions where appropriate.
read point-by-point responses
-
Referee: [CBF framework] CBF framework section: the safety constraint is augmented by a constant robust margin to cover possible under-prediction from the first-order Taylor approximation of the implicitly defined contact force, yet no explicit remainder bound (Lipschitz constant of the implicit map, higher-order term estimate, or state-region enclosure) is supplied that would guarantee the chosen scalar covers the worst-case error.
Authors: We agree that the manuscript does not supply an explicit remainder bound (e.g., Lipschitz constant of the implicit map or higher-order estimate) that would rigorously guarantee the fixed scalar covers the worst-case linearization error. Deriving such a bound is difficult because the error depends on contact geometry, the smoothing parameter, and the particular solution of the relaxed complementarity problem. Our construction therefore selects the robust margin empirically from the boundary-focused rollouts so that it exceeds the observed under-prediction in the tested regimes. In the revision we will add a clarifying paragraph in the CBF framework section that explicitly states this empirical basis and notes the absence of a closed-form guarantee. revision: partial
-
Referee: [κ screening] κ screening procedure: boundary-focused rollouts are used to compare safety margin against approximation error, but the interaction between the selected κ and the fixed robust margin is not analyzed; it remains unclear whether the combined construction still guarantees forward invariance when the linearization error is non-monotonic.
Authors: The boundary-focused rollouts are constructed precisely to expose the non-monotonic dependence of approximation error on κ and to retain only those κ values for which the safety margin remains larger than the observed error. The fixed robust margin is then added uniformly on top of this screened margin. While this combined heuristic eliminates force violations in the four evaluated systems, we do not claim or prove that forward invariance is guaranteed for arbitrary non-monotonic error profiles. In the revision we will insert a short discussion subsection that describes how the screening step interacts with the robust margin and acknowledges that the invariance property is supported empirically rather than by a formal proof that covers all non-monotonic cases. revision: partial
- Deriving a general, explicit remainder bound for the first-order Taylor approximation of the implicitly defined contact force that would hold across arbitrary contact geometries and state regions
Circularity Check
No circularity in derivation; method uses independent approximation and empirical margin
full rationale
The paper constructs a discrete-time CBF from a first-order Taylor expansion of the implicitly defined contact force under smoothed dynamics, then augments the safety constraint with a fixed robust margin chosen per system. The smoothing parameter κ is screened via boundary-focused rollouts that compare safety margin against approximation error, but this screening step and the margin itself are presented as practical additions rather than quantities fitted to or defined by the target safety outcome. No equations reduce the final safety constraint to its inputs by construction, no load-bearing self-citations appear in the derivation outline, and the validation rests on simulations across four systems rather than a self-referential loop. The approach therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- robust margin
axioms (1)
- domain assumption First-order Taylor approximation of the implicitly defined contact force is sufficiently accurate for discrete-time CBF design.
Reference graph
Works this paper leans on
-
[1]
Contact-implicit trajectory optimization using orthogonal colloca- tion,
A. Patel, S. L. Shield, S. Kazi, A. M. Johnson, and L. T. Biegler, “Contact-implicit trajectory optimization using orthogonal colloca- tion,”IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 2242– 2249, 2019
work page 2019
-
[2]
Feedback control of the pusher-slider system: A story of hybrid and underactuated contact dynamics,
F. R. Hogan and A. Rodriguez, “Feedback control of the pusher-slider system: A story of hybrid and underactuated contact dynamics,” in Algorithmic Foundations of Robotics XII: Proceedings of the Twelfth Workshop on the Algorithmic Foundations of Robotics. Springer, 2020, pp. 800–815
work page 2020
-
[3]
A. K. Valenzuela, “Mixed-integer convex optimization for planning aggressive motions of legged robots over rough terrain,” Ph.D. disser- tation, Massachusetts Institute of Technology, 2016
work page 2016
-
[4]
Reactive planar non-prehensile manipulation with hybrid model predictive control,
F. R. Hogan and A. Rodriguez, “Reactive planar non-prehensile manipulation with hybrid model predictive control,”The International Journal of Robotics Research, vol. 39, no. 7, pp. 755–773, 2020
work page 2020
-
[5]
A direct method for trajectory op- timization of rigid bodies through contact,
M. Posa, C. Cantu, and R. Tedrake, “A direct method for trajectory op- timization of rigid bodies through contact,”The International Journal of Robotics Research, vol. 33, no. 1, pp. 69–81, 2014
work page 2014
-
[6]
G. Kim, D. Kang, J.-H. Kim, S. Hong, and H.-W. Park, “Contact- implicit model predictive control: Controlling diverse quadruped mo- tions without pre-planned contact modes or trajectories,”The Inter- national Journal of Robotics Research, vol. 44, no. 3, pp. 486–510, 2025
work page 2025
-
[7]
Robust pivoting manip- ulation using contact implicit bilevel optimization,
Y . Shirai, D. K. Jha, and A. U. Raghunathan, “Robust pivoting manip- ulation using contact implicit bilevel optimization,”IEEE Transactions on Robotics, vol. 40, pp. 3425–3444, 2024
work page 2024
-
[8]
Trajectory optimization for in-hand manipulation with tactile force control,
H. Lee, Y . Kim, V . M. Staven, and C. Sloth, “Trajectory optimization for in-hand manipulation with tactile force control,” in2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025, pp. 21 773–21 779
work page 2025
-
[9]
Bundled gradients through contact via randomized smoothing,
H. J. T. Suh, T. Pang, and R. Tedrake, “Bundled gradients through contact via randomized smoothing,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 4000–4007, 2022
work page 2022
-
[10]
Dojo: A differentiable physics engine for robotics, 2022
T. A. Howell, S. Le Cleac’h, J. Z. Kolter, M. Schwager, and Z. Manch- ester, “Dojo: A differentiable simulator for robotics,”arXiv preprint arXiv:2203.00806, vol. 9, no. 2, p. 4, 2022
-
[11]
Global planning for contact-rich manipulation via local smoothing of quasi-dynamic contact models,
T. Pang, H. T. Suh, L. Yang, and R. Tedrake, “Global planning for contact-rich manipulation via local smoothing of quasi-dynamic contact models,”IEEE Transactions on Robotics, vol. 39, no. 6, pp. 4691–4711, 2023
work page 2023
-
[12]
Dexterous contact-rich manipulation via the contact trust region,
H. T. Suh, T. Pang, T. Zhao, and R. Tedrake, “Dexterous contact-rich manipulation via the contact trust region,”The International Journal of Robotics Research, p. 02783649251398875, 2025
work page 2025
-
[13]
Inverse dynamics trajectory optimization for contact-implicit model predictive control,
V . Kurtz, A. Castro, A. ¨O. ¨Onol, and H. Lin, “Inverse dynamics trajectory optimization for contact-implicit model predictive control,” The International Journal of Robotics Research, vol. 45, no. 1, pp. 23–40, 2026
work page 2026
-
[14]
Guarding force: Safety- critical compliant control for robot-environment interaction,
X. Wang, J. Yang, J. Mao, S. Li, and Y . Yan, “Guarding force: Safety- critical compliant control for robot-environment interaction,”IEEE Robotics and Automation Letters, vol. 11, no. 1, pp. 930–937, 2025
work page 2025
-
[15]
Safe contact-based robot active search using bayesian optimization and control barrier functions,
F. Vinter-Hviid, C. Sloth, T. R. Savarimuthu, and I. Iturrate, “Safe contact-based robot active search using bayesian optimization and control barrier functions,”Frontiers in Robotics and AI, vol. 11, p. 1344367, 2024
work page 2024
-
[16]
Robust adaptive safe robotic grasping with tactile sensing,
Y . Kim, J. Kim, A. H. Li, A. D. Ames, and C. Sloth, “Robust adaptive safe robotic grasping with tactile sensing,” in2025 European Control Conference (ECC), 2025, pp. 2531–2538
work page 2025
-
[17]
Robustness of con- trol barrier functions for safety critical control,
X. Xu, P. Tabuada, J. W. Grizzle, and A. D. Ames, “Robustness of con- trol barrier functions for safety critical control,”IFAC-PapersOnLine, vol. 48, no. 27, pp. 54–61, 2015
work page 2015
-
[18]
Robust control barrier functions for constrained sta- bilization of nonlinear systems,
M. Jankovic, “Robust control barrier functions for constrained sta- bilization of nonlinear systems,”Automatica, vol. 96, pp. 359–367, 2018
work page 2018
-
[19]
Difftaichi: Differentiable programming for physical simulation.arXiv preprint arXiv:1910.00935, 2019
Y . Hu, L. Anderson, T.-M. Li, Q. Sun, N. Carr, J. Ragan-Kelley, and F. Durand, “Difftaichi: Differentiable programming for physical simulation,”arXiv preprint arXiv:1910.00935, 2019
-
[20]
Add: Analytically differentiable dynamics for multi- body systems with frictional contact,
M. Geilinger, D. Hahn, J. Zehnder, M. B ¨acher, B. Thomaszewski, and S. Coros, “Add: Analytically differentiable dynamics for multi- body systems with frictional contact,”ACM Transactions on Graphics (TOG), vol. 39, no. 6, pp. 1–15, 2020
work page 2020
-
[21]
Differentiable dynamics simulation using invariant contact mapping and damped contact force,
M. Lee, J. Lee, and D. Lee, “Differentiable dynamics simulation using invariant contact mapping and damped contact force,” in2023 IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 11 683–11 689
work page 2023
-
[22]
Fast contact-implicit model predic- tive control,
S. Le Cleac’h, T. A. Howell, S. Yang, C.-Y . Lee, J. Zhang, A. Bishop, M. Schwager, and Z. Manchester, “Fast contact-implicit model predic- tive control,”IEEE Transactions on Robotics, vol. 40, pp. 1617–1629, 2024
work page 2024
-
[23]
Control barrier functions: Theory and applications,
A. D. Ames, S. Coogan, M. Egerstedt, G. Notomista, K. Sreenath, and P. Tabuada, “Control barrier functions: Theory and applications,” in2019 18th European Control Conference (ECC), 2019, pp. 3420– 3431
work page 2019
-
[24]
A. Agrawal and K. Sreenath, “Discrete control barrier functions for safety-critical control of discrete systems with application to bipedal robot navigation.” inRobotics: Science and Systems, vol. 13. Cambridge, MA, USA, 2017, pp. 1–10
work page 2017
-
[25]
Safety-critical model predictive control with discrete-time control barrier function,
J. Zeng, B. Zhang, and K. Sreenath, “Safety-critical model predictive control with discrete-time control barrier function,” in2021 American Control Conference (ACC), 2021, pp. 3882–3889
work page 2021
-
[26]
Safety-critical control for non-affine nonlinear systems with application on autonomous vehicle,
T. D. Son and Q. Nguyen, “Safety-critical control for non-affine nonlinear systems with application on autonomous vehicle,” in2019 IEEE 58th Conference on Decision and Control (CDC), 2019, pp. 7623–7628
work page 2019
-
[27]
J. Seo, J. Lee, E. Baek, R. Horowitz, and J. Choi, “Safety-critical control with nonaffine control inputs via a relaxed control barrier function for an autonomous vehicle,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 1944–1951, 2022
work page 1944
-
[28]
Safe neural control for non-affine control systems with differentiable control barrier functions,
W. Xiao, R. Allen, and D. Rus, “Safe neural control for non-affine control systems with differentiable control barrier functions,” in2023 62nd IEEE Conference on Decision and Control (CDC), 2023, pp. 3366–3371
work page 2023
-
[29]
Dini,Lezioni di analisi infinitesimale...: Calcolo differenziale
U. Dini,Lezioni di analisi infinitesimale...: Calcolo differenziale. 1907. di. 720 p. Fratelli Nistri, 1907, vol. 1
work page 1907
-
[30]
Trajectory optimization with optimization-based dynamics,
T. A. Howell, S. Le Cleac’h, S. Singh, P. Florence, Z. Manchester, and V . Sindhwani, “Trajectory optimization with optimization-based dynamics,”IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 6750–6757, 2022
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.