MoSA: Motion-constrained Stress Adaptation for Mitigating Real-to-Sim Gap in Continuum Dynamics via Learning Residual Anisotropy
Pith reviewed 2026-05-22 06:54 UTC · model grok-4.3
The pith
MoSA learns residual stress operators on an isotropic backbone to capture mild anisotropy and close the real-to-sim gap in continuum dynamics.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
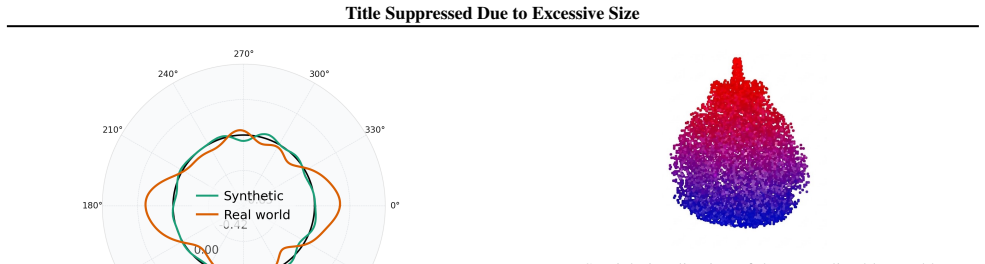
After the near-isotropic backbone is well calibrated, the remaining real-to-sim gap is dominated by mild residual anisotropy and heterogeneity. MoSA captures these effects by learning residual stress operators that progressively adapt stresses via microplane-constrained redistribution inside a physics-informed cascaded network, while motion constraints are enforced by supervising derivatives of the deformation field. The result is higher accuracy, better generalization, and physically interpretable residual anisotropy that improves downstream sim-to-real robot performance.
What carries the argument
Residual stress operators that perform microplane-constrained redistribution of stresses inside a cascaded network, built on top of a calibrated isotropic model and regularized by motion constraints on the deformation field.
If this is right
- Dynamics learned this way achieve higher accuracy and stronger generalization than either the isotropic baseline or end-to-end neural models.
- The learned residual fields remain physically meaningful and can be inspected for anisotropy patterns.
- Improved real-to-sim dynamics directly increase the reliability of sim-to-real transfer for robot manipulation tasks.
- The method retains data efficiency and physical consistency by never discarding the isotropic prior.
Where Pith is reading between the lines
- The same residual-operator pattern could be tried in other simulation domains where the base model is already close but needs small structured corrections.
- Structured residual learning may be especially useful when the expected discrepancy is mild and physically interpretable rather than arbitrary.
- Testing the framework on materials with stronger heterogeneity or large-deformation regimes would reveal where the mild-anisotropy assumption stops holding.
Load-bearing premise
Once the isotropic model is calibrated, the leftover real-to-sim error is mainly mild residual anisotropy and heterogeneity that can be represented by learnable stress operators without overfitting or breaking physical consistency.
What would settle it
If adding the learned residual stress operators produces no reduction in prediction error on held-out real deformation sequences, or if the adapted stresses cause unstable or non-physical simulations, the claim that these operators close the gap would be falsified.
Figures














read the original abstract
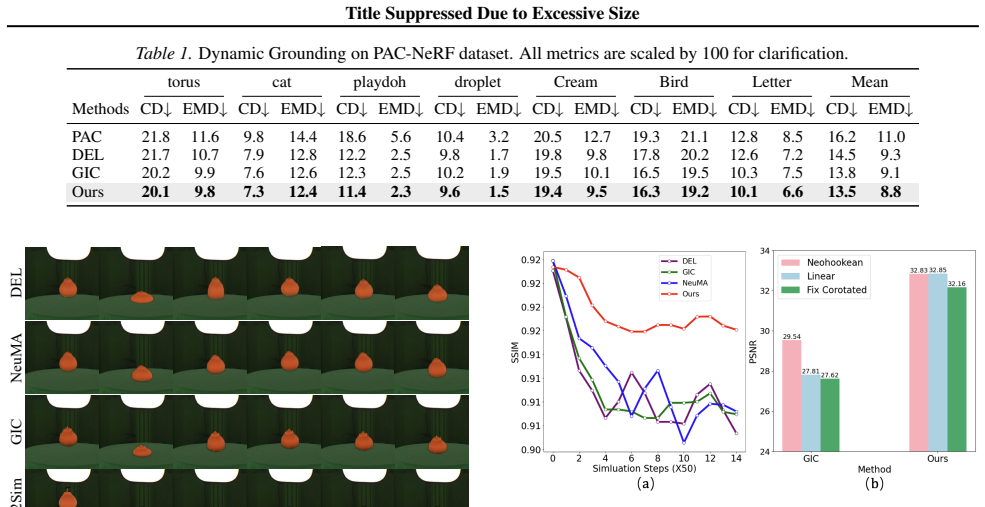
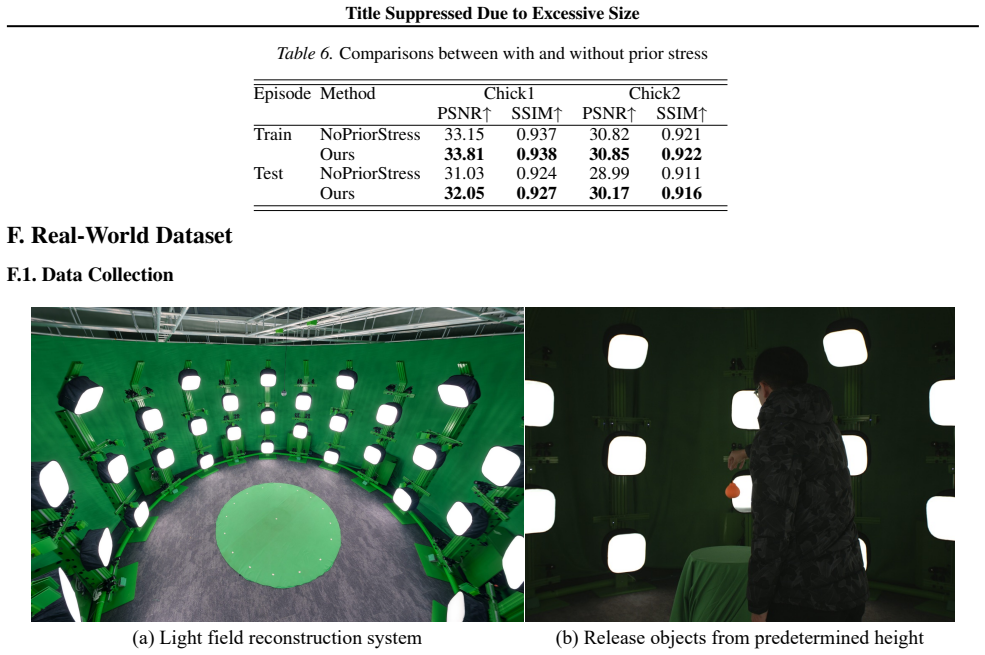
Learning real-world dynamics from visual observations is crucial for various domains. A common strategy is to calibrate simulators by estimating physical parameters, yet accuracy is ultimately bounded by the underlying physical models, which often assume materials are homogeneous and isotropic. Even if reasonable, real-world objects typically exhibit mild anisotropy and heterogeneity. After the near-isotropic backbone is well calibrated, these residual effects become the key bottleneck for further closing the real-to-sim gap. Although neural networks can fit dynamics end-to-end, such black-box modeling discards strong physical priors, leading to poor data efficiency and overfitting. Therefore, we propose MoSA, a motion-constrained stress adaptation framework that targets these residual effects to further improve real-to-sim dynamics learning. MoSA uses an isotropic model as a physics prior and learns residual stress operators to capture mild anisotropy and heterogeneity. It progressively adapts stresses via microplane-constrained redistribution in a physics-informed cascaded network. We further impose motion constraints by supervising temporal and spatial derivatives of the deformation field. Experimentally, our learned dynamics achieves superior accuracy, generalization, and robustness, while learning physically meaningful residual anisotropy. Finally, we validate MoSA in a robot manipulation setting, showing that better real-to-sim dynamics modeling translates into more reliable sim-to-real transfer. Project Page is available at https://mercerai.github.io/MoSA/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes MoSA, a motion-constrained stress adaptation framework for learning continuum dynamics from visual observations. It uses an isotropic model as a physics prior and learns residual stress operators to capture mild anisotropy and heterogeneity via microplane-constrained redistribution in a physics-informed cascaded network, with additional supervision on temporal and spatial derivatives of the deformation field to enforce motion constraints. The central claims are that this yields superior accuracy, generalization, and robustness while producing physically meaningful residuals, and that the improved dynamics modeling enhances sim-to-real transfer in robot manipulation tasks.
Significance. If the empirical claims hold, the work provides a structured way to close residual real-to-sim gaps by augmenting calibrated isotropic priors with learned, constrained residuals rather than discarding physics entirely. This could improve data efficiency and physical consistency in learned dynamics models for deformable objects, with clear relevance to robotics and simulation-based control. The explicit use of motion constraints and microplane redistribution to preserve consistency is a positive design choice that merits further exploration if supported by results.
major comments (3)
- [Abstract] Abstract: the claims of 'superior accuracy, generalization, and robustness' and 'physically meaningful residual anisotropy' are presented without any quantitative error metrics, ablation results, baseline comparisons, or validation statistics. This absence is load-bearing for the central empirical claim that residual stress operators close the remaining real-to-sim gap after isotropic calibration.
- [Method] Method section on residual formulation: the weakest assumption—that mild residual anisotropy and heterogeneity dominate the post-calibration gap and can be captured without overfitting or violating consistency—requires explicit support. No analysis is visible showing that other sources (e.g., contact modeling, sensor noise, or discretization) are secondary, nor are there controls demonstrating that the learned operators remain physically admissible under the imposed motion constraints.
- [Experiments] Robot manipulation validation: the statement that better dynamics modeling 'translates into more reliable sim-to-real transfer' needs quantitative transfer metrics (success rates, trajectory error, or failure modes) with and without MoSA to establish the practical impact; qualitative demonstration alone is insufficient for the claim.
minor comments (3)
- [Method] Clarify the exact parameterization of the residual stress operator (e.g., its functional form, number of learnable weights, and how microplane constraints are enforced at each cascade step) to support reproducibility.
- [Related Work] Add a short discussion or reference to related work on microplane theory and residual learning in continuum mechanics to better situate the contribution.
- [Figures] Ensure all figures depicting learned anisotropy include quantitative measures (e.g., anisotropy ratios or eigenvalue spreads) rather than relying solely on visual inspection.
Simulated Author's Rebuttal
Thank you for the opportunity to respond to the referee's report. We are grateful for the positive evaluation of the significance of our proposed MoSA framework and the detailed feedback provided. We address each of the major comments below and have revised the manuscript accordingly to incorporate the suggested improvements.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claims of 'superior accuracy, generalization, and robustness' and 'physically meaningful residual anisotropy' are presented without any quantitative error metrics, ablation results, baseline comparisons, or validation statistics. This absence is load-bearing for the central empirical claim that residual stress operators close the remaining real-to-sim gap after isotropic calibration.
Authors: We agree that the abstract should include quantitative support for the claims to make them more compelling. Accordingly, we have revised the abstract to include specific quantitative metrics from our experiments, such as the percentage improvements in accuracy and generalization, references to ablation studies, and baseline comparisons. This revision ensures that the central empirical claims are substantiated directly in the abstract. revision: yes
-
Referee: [Method] Method section on residual formulation: the weakest assumption—that mild residual anisotropy and heterogeneity dominate the post-calibration gap and can be captured without overfitting or violating consistency—requires explicit support. No analysis is visible showing that other sources (e.g., contact modeling, sensor noise, or discretization) are secondary, nor are there controls demonstrating that the learned operators remain physically admissible under the imposed motion constraints.
Authors: We thank the referee for highlighting this important aspect. While the manuscript discusses the motivation for focusing on residual effects after calibration, we recognize the need for more explicit support. In the revised manuscript, we have added an analysis in the Method section addressing why other potential sources of the gap are secondary, based on our calibration diagnostics. We have also included additional experiments and controls to demonstrate that the learned residual operators maintain physical admissibility, including checks for consistency with the motion constraints and absence of overfitting through cross-validation. revision: yes
-
Referee: [Experiments] Robot manipulation validation: the statement that better dynamics modeling 'translates into more reliable sim-to-real transfer' needs quantitative transfer metrics (success rates, trajectory error, or failure modes) with and without MoSA to establish the practical impact; qualitative demonstration alone is insufficient for the claim.
Authors: We acknowledge that quantitative metrics would provide a more rigorous validation of the sim-to-real benefits. In the revised version, we have supplemented the robot manipulation experiments with quantitative results, including success rates for the manipulation tasks with and without MoSA, as well as trajectory error metrics and a discussion of observed failure modes. These additions directly address the need for measurable evidence of improved transfer reliability. revision: yes
Circularity Check
No significant circularity identified
full rationale
The paper's derivation starts from a standard isotropic continuum model as an external physics prior, then augments it with learned residual stress operators whose supervision comes from independent motion derivatives of the deformation field. No equation or claim reduces a reported prediction to a fitted parameter by construction, nor does any load-bearing step rely on a self-citation chain whose validity is internal to the present work. The residual formulation and microplane constraints are presented as additive corrections whose consistency is enforced by explicit derivative supervision rather than by redefinition of the target quantities. The framework is therefore self-contained against external benchmarks and receives the default non-circularity finding.
Axiom & Free-Parameter Ledger
free parameters (1)
- residual stress operator weights
axioms (1)
- domain assumption Real-world objects exhibit only mild anisotropy and heterogeneity after the isotropic backbone is calibrated.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquationwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
MoSA uses an isotropic model as a physics prior and learns residual stress operators to capture mild anisotropy and heterogeneity. It progressively adapts stresses via microplane-constrained redistribution in a physics-informed cascaded network.
-
IndisputableMonolith/Foundation/BranchSelectionbranch_selection unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We keep a calibrated near-isotropic backbone to explain the dominant behavior, and learn only the residual effects that arise from mild anisotropy and heterogeneity.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Bolliger, D., Fadini, G., Bambach, M., and Rupenyan, A. Differentiable material point method for the control of deformable objects.arXiv preprint arXiv:2512.13214,
-
[2]
Cai, J., Yang, Y ., Yuan, W., He, Y ., Dong, Z., Bo, L., Cheng, H., and Chen, Q. Gic: Gaussian-informed continuum for physical property identification and simulation.arXiv preprint arXiv:2406.14927,
-
[3]
Chen, C., Dou, Z., Wang, C., Huang, Y ., Chen, A., Feng, Q., Gu, J., and Liu, L. Vid2sim: Generalizable, video-based reconstruction of appearance, geometry and physics for mesh-free simulation. InProceedings of the Computer Vision and Pattern Recognition Conference, pp. 26545– 26555, 2025a. Chen, G., Suri, S., Wu, Y ., V oulga, E., Levin, D. I., and Pai, ...
-
[4]
Dagli, R., Xiang, D., Modi, V ., Loop, C., Tsang, C. F., Chen, A. H., Hu, A., State, G., Levin, D. I., and Shugrina, M. V omp: Predicting volumetric mechanical property fields. arXiv preprint arXiv:2510.22975,
-
[5]
Gaussianflow: Splatting gaussian dynamics for 4d content creation.arXiv preprint arXiv:2403.12365,
Gao, Q., Xu, Q., Cao, Z., Mildenhall, B., Ma, W., Chen, L., Tang, D., and Neumann, U. Gaussianflow: Splatting gaussian dynamics for 4d content creation.arXiv preprint arXiv:2403.12365,
-
[6]
Jaques, M., Burke, M., and Hospedales, T. Physics-as- inverse-graphics: Unsupervised physical parameter es- timation from video.arXiv preprint arXiv:1905.11169,
-
[7]
The material point method for simulating continuum materials
Jiang, C., Schroeder, C., Teran, J., Stomakhin, A., and Selle, A. The material point method for simulating continuum materials. InAcm siggraph 2016 courses, pp. 1–52. ACM,
work page 2016
-
[8]
Jiang, H., Hsu, H.-Y ., Zhang, K., Yu, H.-N., Wang, S., and Li, Y . Phystwin: Physics-informed reconstruction and simulation of deformable objects from videos.arXiv preprint arXiv:2503.17973,
-
[9]
K., Ye, J., Duan, Y ., Abbeel, P., Wang, X., and Yi, S
Jing, C., Bandi, J. K., Ye, J., Duan, Y ., Abbeel, P., Wang, X., and Yi, S. Contact-aware neural dynamics.arXiv preprint arXiv:2601.12796,
-
[10]
URL https://repo-sam.inria.fr/ fungraph/3d-gaussian-splatting/. Li, X., Qiao, Y .-L., Chen, P. Y ., Jatavallabhula, K. M., Lin, M., Jiang, C., and Gan, C. Pac-nerf: Physics augmented continuum neural radiance fields for geometry-agnostic system identification.arXiv preprint arXiv:2303.05512,
-
[11]
Lin, Y ., Lin, C., Xu, J., and Mu, Y . Omniphysgs: 3d con- stitutive gaussians for general physics-based dynamics generation.arXiv preprint arXiv:2501.18982,
-
[12]
Vasile, F., Qiu, R.-Z., Natale, L., and Wang, X. Gaussian- augmented physics simulation and system identification with complex colliders.arXiv preprint arXiv:2511.06846,
-
[13]
Xu, Q., Liu, J., Yu, S., Wang, Y ., Zhou, Y ., Zhou, J., Cui, J., Ong, Y .-S., and Zhang, H. Neuspring: Neural spring fields for reconstruction and simulation of deformable objects from videos.arXiv preprint arXiv:2511.08310, 2025a. Xu, X., Ge, W., Qiu, D., Chen, Z., Yan, D., Liu, Z., Zhao, H., Zhao, H., Zhang, S., Liang, J., and Chen, Y .-C. Gaussian- pr...
-
[14]
Zhang, K., Li, B., Hauser, K., and Li, Y . Adaptigraph: Material-adaptive graph-based neural dynamics for robotic manipulation.arXiv preprint arXiv:2407.07889,
-
[15]
Zhobro, M., Geist, A. R., and Martius, G. Learning 3d- gaussian simulators from rgb videos.arXiv preprint arXiv:2503.24009,
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.