Output Feedback MPC with Adaptive Tubes
Pith reviewed 2026-05-25 03:31 UTC · model grok-4.3
The pith
An adaptive tube-based output feedback MPC for LTI systems with parametric and additive uncertainties that updates tube geometry, constraints, and terminal sets from evolving observer estimates.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Recursive feasibility and robust exponential stability are established for the proposed adaptive tube MPC framework that updates constraint tightening, terminal ingredients, and tube geometry as estimates evolve.
Load-bearing premise
An adaptive observer exists that can simultaneously provide point estimates of the state, model parameters, and initial condition while jointly updating the corresponding sets containing the true parameters and initial state (abstract).
Figures





read the original abstract
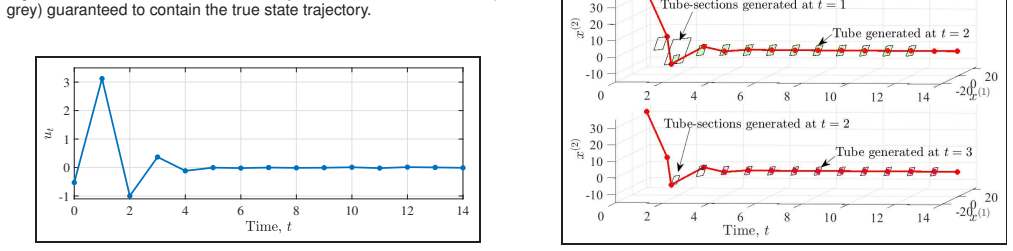
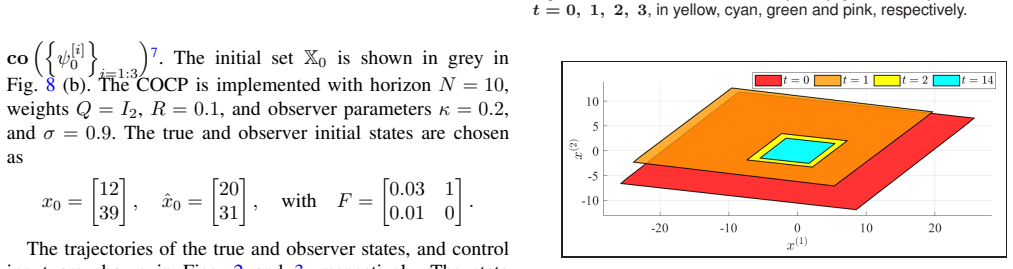
An output feedback model predictive control (MPC) framework with adaptive tubes is proposed for linear time-invariant systems subject to parametric and additive uncertainties. An adaptive observer provides point estimates of the system state, model parameters, and initial condition, while jointly updating the corresponding sets containing the true parameters and initial state. These estimates parameterize the constrained optimal control problem, enabling constraint tightening, terminal ingredients, and tube geometry to be updated as the estimates evolve. In contrast to standard robust tube-based MPC formulations, the proposed approach does not require a common quadratically stabilizing linear feedback gain across the parametric uncertainty set. As the available uncertainty information improves, the tube geometry evolves accordingly, resulting in an adaptive tube MPC framework with improved performance over time. Recursive feasibility and robust exponential stability are established, and a numerical example is presented.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes an output feedback MPC framework with adaptive tubes for LTI systems subject to parametric and additive uncertainties. An adaptive observer supplies point estimates of the state, parameters, and initial condition while updating the corresponding uncertainty sets; these sets are used to adaptively tighten constraints, update terminal ingredients, and evolve tube geometry online. The approach claims to avoid the need for a common quadratically stabilizing feedback gain across the uncertainty set. Recursive feasibility and robust exponential stability are asserted, and a numerical example is mentioned.
Significance. If the central claims hold, the work would provide a mechanism for performance improvement in robust tube MPC as uncertainty information is refined, reducing conservatism relative to fixed-tube designs. The relaxation of the common stabilizing gain requirement could extend applicability to broader classes of uncertain LTI systems.
major comments (2)
- [Abstract] Abstract: the claims of recursive feasibility and robust exponential stability are asserted without derivation steps, error bounds, or explicit conditions on the adaptive observer or set updates. This is load-bearing for the central contribution and prevents verification of the stated guarantees.
- [Recursive feasibility proof] Recursive feasibility argument: it is not shown how the observer-driven set updates (which may contract non-monotonically) preserve feasibility of the shifted prior optimal sequence under the new tightened constraints and updated terminal set. If the new terminal set is not invariant under the revised uncertainty, the standard tube-MPC shifting argument fails; this directly undermines the recursive-feasibility claim.
minor comments (1)
- [Numerical example] Numerical example: the abstract states that a numerical example is presented, yet no data, figures, or performance metrics appear in the available text, making it impossible to assess practical behavior or improvement over time.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major comment below, clarifying the presentation of our results while indicating revisions that will strengthen the exposition.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claims of recursive feasibility and robust exponential stability are asserted without derivation steps, error bounds, or explicit conditions on the adaptive observer or set updates. This is load-bearing for the central contribution and prevents verification of the stated guarantees.
Authors: The abstract serves as a high-level summary of the contribution. The full derivations, including error bounds on the adaptive observer, explicit conditions on the set updates, and the proofs of recursive feasibility and robust exponential stability, appear in Sections III and IV, with the main results stated as Theorems 1 and 2. To improve accessibility, we will revise the abstract to include a brief reference to these theorems and the key assumptions on the observer. revision: yes
-
Referee: [Recursive feasibility proof] Recursive feasibility argument: it is not shown how the observer-driven set updates (which may contract non-monotonically) preserve feasibility of the shifted prior optimal sequence under the new tightened constraints and updated terminal set. If the new terminal set is not invariant under the revised uncertainty, the standard tube-MPC shifting argument fails; this directly undermines the recursive-feasibility claim.
Authors: Theorem 1 establishes recursive feasibility by showing that the updated uncertainty sets always contain the true parameters and initial condition, and that the terminal set is recomputed to remain positively invariant under the closed-loop dynamics with the current uncertainty bounds. The proof adapts the standard shifting argument by verifying that the shifted sequence satisfies the new tightened constraints and terminal constraint because the tightening is performed with respect to the updated sets at each step. We will add a remark in Section IV explicitly highlighting the invariance property under non-monotonic updates to make this step clearer. revision: partial
Circularity Check
No significant circularity; derivation relies on standard tube MPC theory plus assumed adaptive observer
full rationale
The paper assumes existence of an adaptive observer that supplies point estimates and contracting sets for state, parameters, and initial condition. These sets are then used to update constraint tightening, terminal ingredients, and tube geometry in an otherwise standard output-feedback tube MPC formulation. Recursive feasibility and robust exponential stability are claimed via adaptation of the usual shifting argument from robust tube MPC literature. No load-bearing self-citation, no fitted parameter renamed as prediction, and no self-definitional reduction appear in the provided abstract or skeptic analysis; the central claims remain independent of quantities defined inside the paper itself.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The plant is linear time-invariant with bounded parametric and additive uncertainties.
- domain assumption An adaptive observer can jointly estimate state, parameters, and initial condition while updating the corresponding uncertainty sets.
invented entities (1)
-
Adaptive tubes
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Recursive feasibility and robust exponential stability are established for the proposed adaptive tube MPC framework that updates constraint tightening, terminal ingredients, and tube geometry as estimates evolve.
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
An adaptive observer provides point estimates... jointly updating the corresponding sets... enabling constraint tightening, terminal ingredients, and tube geometry to be updated
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
B. Kouvaritakis and M. Cannon, “Model Predictive Control,” Cham, Switzerland: Springer International , vol. 38, 2016
work page 2016
-
[2]
J. B. Rawlings, D. Q. Mayne, and M. M. Diehl, Model Predictive Control: Theory, Computation, and Design . Nob Hill Publishing, LLC, 2017
work page 2017
-
[3]
Systems with persiste nt dis- turbances: predictive control with restricted constraint s,
L. Chisci, J. Rossiter, and G. Zappa, “Systems with persiste nt dis- turbances: predictive control with restricted constraint s,” Automatica, vol. 37, no. 7, pp. 1019–1028, 2001
work page 2001
-
[4]
R obust model predictive control using tubes,
W. Langson, I. Chryssochoos, S. Rakovi´ c, and D. Q. Mayne, “R obust model predictive control using tubes,” Automatica, vol. 40, no. 1, pp. 125–133, 2004
work page 2004
-
[5]
Homo- thetic tube model predictive control,
S. V . Rakovi´ c, B. Kouvaritakis, R. Findeisen, and M. Cannon , “Homo- thetic tube model predictive control,” Automatica, vol. 48, no. 8, pp. 1631–1638, 2012
work page 2012
-
[6]
Robust tube MPC for linear systems with multiplicative uncertainty,
J. Fleming, B. Kouvaritakis, and M. Cannon, “Robust tube MPC for linear systems with multiplicative uncertainty,” IEEE Transactions on Automatic Control, vol. 60, no. 4, pp. 1087–1092, 2015
work page 2015
-
[7]
Robust const rained model predictive control using linear matrix inequalities ,
M. V . Kothare, V . Balakrishnan, and M. Morari, “Robust const rained model predictive control using linear matrix inequalities ,” Automatica, vol. 32, no. 10, pp. 1361–1379, 1996
work page 1996
-
[8]
A simple robust MPC for linear systems with parametric and additive u ncertainty,
M. Bujarbaruah, U. Rosolia, Y . R. St¨ urz, and F. Borrelli, “A simple robust MPC for linear systems with parametric and additive u ncertainty,” in American Control Conference , 2021, pp. 2108–2113
work page 2021
-
[9]
Adap tive tube- based model predictive control for linear systems with para metric uncertainty,
S. Jafari Fesharaki, M. Kamali, and F. Sheikholeslam, “Adap tive tube- based model predictive control for linear systems with para metric uncertainty,” IET Control Theory & Applications , vol. 11, no. 17, pp. 2947–2953, 2017
work page 2017
-
[10]
Indirect adaptive MPC for discrete-t ime LTI systems with parametric uncertainties,
A. Dhar and S. Bhasin, “Indirect adaptive MPC for discrete-t ime LTI systems with parametric uncertainties,” IEEE Transactions on Automatic Control, vol. 66, no. 11, pp. 5498–5505, 2021. 14 IEEE TRANSACTIONS AND JOURNALS TEMPLA TE
work page 2021
-
[11]
Lin- ear robust adaptive model predictive control: Computation al complexity and conservatism,
J. K¨ ohler, E. Andina, R. Soloperto, M. A. M¨ uller, and F. Allg¨ ower, “Lin- ear robust adaptive model predictive control: Computation al complexity and conservatism,” in IEEE Conference on Decision and Control , 2019, pp. 1383–1388
work page 2019
-
[12]
Robust MPC with re cursive model update,
M. Lorenzen, M. Cannon, and F. Allg¨ ower, “Robust MPC with re cursive model update,” Automatica, vol. 103, pp. 461–471, 2019
work page 2019
-
[13]
Robust adaptive model predictive contr ol with persistent excitation conditions,
X. Lu and M. Cannon, “Robust adaptive model predictive contr ol with persistent excitation conditions,” Automatica, vol. 152, p. 110959, 2023
work page 2023
-
[14]
Adaptive output feedback MPC with guar anteed stability and robustness,
A. Dey and S. Bhasin, “Adaptive output feedback MPC with guar anteed stability and robustness,” IEEE Transactions on Automatic Control , vol. 70, no. 12, pp. 8345–8352, 2025
work page 2025
-
[15]
Adaptive output feedback mod el predictive control,
A. Dey, A. Dhar, and S. Bhasin, “Adaptive output feedback mod el predictive control,” IEEE Control Systems Letters , vol. 7, pp. 1129– 1134, 2023
work page 2023
-
[16]
Robust adaptive tube model predictive c ontrol,
X. Lu and M. Cannon, “Robust adaptive tube model predictive c ontrol,” in American Control Conference , 2019, pp. 3695–3701
work page 2019
-
[17]
Robust MPC with reduced conserv atism blending multiples tubes,
M. K¨ ogel and R. Findeisen, “Robust MPC with reduced conserv atism blending multiples tubes,” in American Control Conference , 2020, pp. 1949–1954
work page 2020
-
[18]
Self-tuning tube-ba sed model predictive control,
D. Tranos, A. Russo, and A. Proutiere, “Self-tuning tube-ba sed model predictive control,” in American Control Conference , 2023, pp. 3626– 3632
work page 2023
-
[19]
Tube MPC with time-varying cross-sections,
K. Wang, S. Zhang, S. Gros, and S. V . Rakovi´ c, “Tube MPC with time-varying cross-sections,” IEEE Transactions on Automatic Control , vol. 70, no. 3, pp. 1851–1858, 2025
work page 2025
-
[20]
P . P . Khargonekar, I. R. Petersen, and K. Zhou, “Robust stabi lization of uncertain linear systems: quadratic stabilizability an d H ∞ control theory,” IEEE Transactions on Automatic Control , vol. 35, no. 3, pp. 356–361, 1990
work page 1990
-
[21]
A linear matrix inequality approach toH ∞ control,
P . Gahinet and P . Apkarian, “A linear matrix inequality approach toH ∞ control,” International Journal of Robust and Nonlinear Control , vol. 4, no. 4, pp. 421–448, 1994
work page 1994
-
[22]
Necessary and sufficient conditions for quad ratic stabilizability of an uncertain system,
B. R. Barmish, “Necessary and sufficient conditions for quad ratic stabilizability of an uncertain system,” Journal of Optimization Theory and Applications , vol. 46, no. 4, pp. 399–408, 1985
work page 1985
-
[23]
I. Petersen, “Quadratic stabilizability of uncertain line ar systems: Ex- istence of a nonlinear stabilizing control does not imply ex istence of a linear stabilizing control,” IEEE Transactions on Automatic Control , vol. 30, no. 3, pp. 291–293, 1985
work page 1985
-
[24]
D ata-driven model predictive control with stability and robustness gua rantees,
J. Berberich, J. K¨ ohler, M. A. M¨ uller, and F. Allg¨ ower, “D ata-driven model predictive control with stability and robustness gua rantees,” IEEE Transactions on Automatic Control, vol. 66, no. 4, pp. 1702–1717, 2020
work page 2020
-
[25]
Data-enabled predi ctive control: In the shallows of the DeePC,
J. Coulson, J. Lygeros, and F. D¨ orfler, “Data-enabled predi ctive control: In the shallows of the DeePC,” in European Control Conference, 2019, pp. 307–312
work page 2019
-
[26]
Set-membership identificatio n of sys- tems with parametric and nonparametric uncertainty,
R. Kosut, M. Lau, and S. Boyd, “Set-membership identificatio n of sys- tems with parametric and nonparametric uncertainty,” IEEE Transactions on Automatic Control , vol. 37, no. 7, pp. 929–941, 1992
work page 1992
-
[27]
Adaptive observers with exponential ra te of conver- gence,
G. Kreisselmeier, “Adaptive observers with exponential ra te of conver- gence,” IEEE Transactions on Automatic Control , vol. 22, no. 1, pp. 2–8, 1977
work page 1977
-
[28]
Rapid identification of linear and nonlinear sys tems
P . M. Lion, “Rapid identification of linear and nonlinear sys tems.” AIAA Journal, vol. 5, no. 10, pp. 1835–1842, 1967
work page 1967
-
[29]
Initial excitatio n- based adaptive observers for discrete-time LTI systems,
A. Dey, S. Bandyopadhyay, and S. Bhasin, “Initial excitatio n- based adaptive observers for discrete-time LTI systems,” i n European Control Conference , 2026, to appear. [Online]. Available: https://arxiv.org/abs/2511.13117
-
[30]
Block recurs ive parallelotopic bounding in set membership identification,
L. Chisci, A. Garulli, A. Vicino, and G. Zappa, “Block recurs ive parallelotopic bounding in set membership identification, ” Automatica, vol. 34, no. 1, pp. 15–22, 1998
work page 1998
-
[31]
Robust output feedback MPC for u ncertain linear systems with reduced conservatism,
M. K¨ ogel and R. Findeisen, “Robust output feedback MPC for u ncertain linear systems with reduced conservatism,” IF AC-PapersOnLine, vol. 50, no. 1, pp. 10 685–10 690, 2017
work page 2017
-
[32]
Robust output feedback model predictive control of constrained li near systems,
D. Q. Mayne, S. V . Rakovi´ c, R. Findeisen, and F. Allg¨ ower, “ Robust output feedback model predictive control of constrained li near systems,” Automatica, vol. 42, no. 7, pp. 1217–1222, 2006
work page 2006
-
[33]
Robust output feedback model predictive control of constrained linear sy stems: Time varying case,
D. Q. Mayne, S. Rakovi´ c, R. Findeisen, and F. Allg¨ ower, “Robust output feedback model predictive control of constrained linear sy stems: Time varying case,” Automatica, vol. 45, no. 9, pp. 2082–2087, 2009
work page 2082
-
[34]
Invariant approximations of the minimal robust positivel y invariant set,
S. V . Rakovic, E. C. Kerrigan, K. I. Kouramas, and D. Q. Mayne, “Invariant approximations of the minimal robust positivel y invariant set,” IEEE Transactions on Automatic Control , vol. 50, no. 3, pp. 406–410, 2005
work page 2005
- [35]
-
[36]
A. Dey and S. Bhasin, “Computation of maximal admissible rob ust positive invariant sets for linear systems with parametric and additive uncertainties,” IEEE Control Systems Letters , vol. 8, pp. 1775–1780, 2024
work page 2024
-
[37]
Limited-complexity mod el- unfalsifying adaptive tracking-control,
H. M. S. M. V eres and J. of P . Norton, “Limited-complexity mod el- unfalsifying adaptive tracking-control,” International Journal of Control, vol. 72, no. 15, pp. 1417–1426, 1999
work page 1999
-
[38]
Persistently excit ing model predictive control,
G. Marafioti, R. R. Bitmead, and M. Hovd, “Persistently excit ing model predictive control,” International Journal of Adaptive Control and Signal Processing, vol. 28, no. 6, pp. 536–552, 2014
work page 2014
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.