Soft Tuy-Completeness for Robust Projection Selection in Cone-Beam CT
Pith reviewed 2026-06-30 17:23 UTC · model grok-4.3
The pith
A continuous soft Tuy completeness model lets greedy projection selection reach 99.8 percent of MILP optimality in cone-beam CT.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Replacing binary hit-or-miss checks with a soft near-orthogonality score and resolution-aware saturated coverage objective grounded in Tuy's completeness theory turns the NP-complete projection selection problems into ones solvable by a greedy algorithm whose objective values achieve a pooled median ratio of 0.998 to certified MILP optima across six regions, varying budgets, and occlusion conditions, while Effective Spatial Resolution provides a direct diagnostic bridge to image-domain feature sizes without requiring reconstruction.
What carries the argument
The resolution-aware saturated coverage objective paired with the soft near-orthogonality score, which grades directional completeness on a continuous scale instead of binary checks.
If this is right
- The MILP serves primarily as a quality certificate for greedy solutions rather than a competing solver.
- A binary formulation improves hard directional completeness but weakens performance on the continuous coverage metric.
- Effective Spatial Resolution supplies a practical, reconstruction-free way to compare trajectories across budgets and occlusions.
- Submodular structure enables efficient near-optimal selection while retaining the physical grounding of Tuy completeness.
Where Pith is reading between the lines
- The differentiable scores open the door to gradient-based refinement or online adaptation of trajectories during acquisition.
- The same soft-completeness idea could transfer to other sparse-view or limited-angle tomography settings that rely on directional sampling.
- Task-specific weighting of the coverage objective might allow direct optimization for diagnostic feature sizes rather than uniform resolution.
Load-bearing premise
The graded soft scores preserve a direct, physically meaningful correspondence to the smallest resolvable feature sizes in the reconstructed volume.
What would settle it
A set of reconstructions in which the feature sizes actually achieved deviate measurably from the Effective Spatial Resolution values predicted by the soft objective under matched occlusion conditions.
Figures


read the original abstract
This work introduces a continuous soft near-orthogonality score and a resolution-aware saturated coverage objective for projection selection in region-of-interest focused cone-beam CT, grounded in Tuy's completeness theory. Replacing the binary hit-or-miss model of classical Tuy completeness with a graded, differentiable formulation preserves a direct link to achievable feature sizes while enabling both efficient approximate and exact optimisation. We establish that the underlying discrete decision problems are NP-complete via polynomial-time reductions from Set Cover, motivating a submodular greedy algorithm with proven $(1-1/\mathrm{e})$ approximation guarantees and a mixed-integer linear program (MILP) that provides certified optimality bounds. The MILP serves as a quality certificate for the greedy solution rather than a competing optimiser. The primary empirical finding confirms this relationship: across a systematic benchmark spanning six target regions, multiple projection budgets, and four controlled occlusion conditions, the pooled median greedy-to-MILP objective ratio was 0.998, with a substantial fraction of cases certified globally optimal. A binary formulation is included as a diagnostic baseline; it strengthens hard directional completeness but is weaker on the continuous coverage scale. We additionally introduce Effective Spatial Resolution (ESR), a physically interpretable trajectory-level diagnostic that maps directional sampling gaps to achievable feature sizes. ESR correlates reliably with matched reconstruction quality across projection budgets and occlusion levels, providing a practical bridge between the selection stage and the image domain without requiring reconstruction.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces a continuous, differentiable formulation of Tuy completeness for projection selection in region-of-interest cone-beam CT. It replaces binary hit-or-miss models with a soft near-orthogonality score and a resolution-aware saturated coverage objective, proves the underlying discrete problems NP-complete via Set Cover reductions, supplies a submodular greedy algorithm carrying a (1-1/e) guarantee together with an MILP that certifies optimality bounds, and reports a pooled median greedy-to-MILP objective ratio of 0.998 across six target regions, multiple budgets and four occlusion conditions. An Effective Spatial Resolution (ESR) diagnostic is defined that maps directional gaps to feature sizes and is shown to correlate with reconstruction quality.
Significance. If the empirical ratio and ESR-reconstruction correlation hold under the stated controls, the work supplies a theoretically grounded, computationally tractable pipeline that retains a direct physical link to achievable resolution while delivering near-optimal selections with explicit certificates. The combination of proven approximation, independent MILP bounds, and reproducible benchmark design constitutes a clear methodological advance for CBCT trajectory planning.
minor comments (3)
- [Abstract] Abstract: the pooled-median ratio of 0.998 is presented without reference to the precise data-exclusion criteria or per-condition variance; a one-sentence pointer to the corresponding methods paragraph would improve transparency.
- [§4] §4 (ESR definition): the mapping from directional gap to feature size is stated to be physically interpretable, yet the precise scaling constant and its dependence on source-to-detector distance are not written explicitly; adding the formula would remove ambiguity.
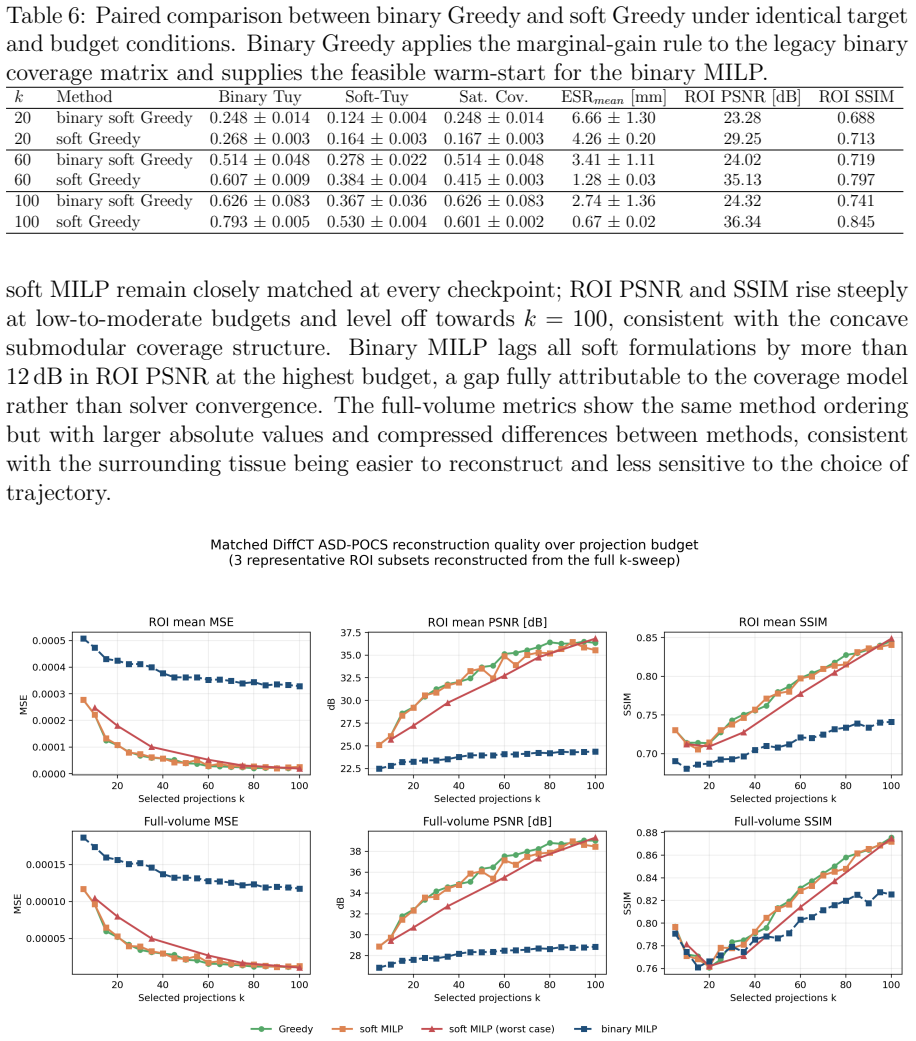
- [Table 2] Table 2 caption: the phrase 'substantial fraction certified globally optimal' should be replaced by the exact count or percentage of instances in which the MILP gap was zero.
Simulated Author's Rebuttal
We thank the referee for the detailed summary, positive significance assessment, and recommendation of minor revision. No specific major comments were listed in the report.
Circularity Check
No significant circularity; derivation relies on independent external results
full rationale
The paper defines its soft near-orthogonality and saturated coverage objectives directly from Tuy's completeness theory, reduces NP-completeness from the external Set Cover problem, invokes the standard (1-1/e) submodular greedy guarantee, and uses MILP solely for independent optimality certificates. The reported 0.998 median ratio is an empirical validation metric, not a fitted input renamed as prediction. ESR is introduced as a new mapping from directional gaps to feature sizes with no self-referential reduction. No load-bearing self-citations, ansatzes smuggled via prior work, or uniqueness theorems imported from the same authors appear in the provided material; the pipeline is self-contained against external benchmarks and theorems.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Tuy's completeness theory provides the correct directional sampling requirements for exact reconstruction in cone-beam CT.
Reference graph
Works this paper leans on
-
[1]
Task-driven source–detector trajectories in cone-beam computed tomography: I. Theory and methods
J. Webster Stayman et al. “Task-driven source–detector trajectories in cone-beam computed tomography: I. Theory and methods”. In:Journal of Medical Imaging 6.02 (May 2019), p. 1.issn: 2329-4302.doi:10.1117/1.jmi.6.2.025002.url: https://doi.org/10.1117/1.jmi.6.2.025002
-
[2]
Gabriel Herl, Jochen Hiller, and Andreas Maier. “Scanning trajectory optimisa- tion using a quantitative Tuybased local quality estimation for robot-based X- ray computed tomography”. In:Nondestructive Testing and Evaluation35.3 (June 2020), pp. 287–303.issn: 1058-9759.doi:10.1080/10589759.2020.1774579.url: https://doi.org/10.1080/10589759.2020.1774579
-
[3]
Scan Time Reduc- tion by Fewer Projections - an Approach for Circular and Spherical Trajectories
Fabian Bauer, Matthias Goldammer, and Christian U. Grosse. “Scan Time Reduc- tion by Fewer Projections - an Approach for Circular and Spherical Trajectories”. In:e-Journal of Nondestructive Testing29.6 (June 2024).issn: 1435-4934.doi: 10.58286/29896.url:https://doi.org/10.58286/29896
work page doi:10.58286/29896.url:https://doi.org/10.58286/29896 2024
-
[4]
Task-Specific Trajectory Optimisation for Twin-Robotic X- Ray Tomography
Gabriel Herl et al. “Task-Specific Trajectory Optimisation for Twin-Robotic X- Ray Tomography”. In:IEEE Transactions on Computational Imaging7 (2021), pp. 894–907.issn: 2333-9403.doi:10 . 1109 / tci . 2021 . 3102824.url:https : //doi.org/10.1109/tci.2021.3102824
-
[5]
RoboCT – Application for in-situ Inspection of Join Technologies of large scale Objects
W. Holub, F. Brunner, and T. Sch¨ on. “RoboCT – Application for in-situ Inspection of Join Technologies of large scale Objects”. In: 2019
2019
-
[6]
Integer Optimization of CT Trajectories using a Discrete Data Completeness Formulation
Linda-Sophie Schneider, Gabriel Herl, and Andreas K. Maier. “Integer Optimization of CT Trajectories using a Discrete Data Completeness Formulation”. In:arXiv.org abs/2402.10223 (2024)
-
[7]
S Hatamikia et al. “Source-detector trajectory optimization in cone-beam computed tomography: a comprehensive review on today’s state-of-the-art”. In:Physics in Medicine & Biology67.16 (Aug. 2022), 16TR03.issn: 0031-9155.doi:10 . 1088/1361-6560/ac8590.url:https://doi.org/10.1088/1361-6560/ac8590
-
[8]
An Inversion Formula for Cone-Beam Reconstruction
Heang K. Tuy. “An Inversion Formula for Cone-Beam Reconstruction”. In:SIAM Journal on Applied Mathematics43.3 (June 1983), pp. 546–552.issn: 0036-1399. doi:10.1137/0143035.url:https://doi.org/10.1137/0143035
work page doi:10.1137/0143035.url:https://doi.org/10.1137/0143035 1983
-
[9]
Construction of correlation functions in two and three dimensions
Bruce D. Smith. “Image Reconstruction from Cone-Beam Projections: Necessary and Sufficient Conditions and Reconstruction Methods”. In:IEEE Transactions on Medical Imaging4.1 (Mar. 1985), pp. 14–25.issn: 0278-0062.doi:10.1109/tmi. 1985.4307689.url:https://doi.org/10.1109/tmi.1985.4307689
work page doi:10.1109/tmi 1985
-
[10]
Andreas Maier et al. “Discrete Estimation of Data Completeness for 3D Scan Tra- jectories with Detector Offset”. In:Informatik aktuell. Springer Berlin Heidelberg, 2015, pp. 47–52.isbn: 9783662462232.doi:10.1007/978- 3- 662- 46224- 9_10. url:https://doi.org/10.1007/978-3-662-46224-9_10
-
[11]
Completeness map evaluation demonstrated with candidate nextgeneration cardiac CT architectures
Baodong Liu et al. “Completeness map evaluation demonstrated with candidate nextgeneration cardiac CT architectures”. In:Medical Physics39.5 (Apr. 2012), pp. 2405–2416.issn: 0094-2405.doi:10.1118/1.3700172.url:https://doi. org/10.1118/1.3700172. 39
-
[12]
Gabriel Herl, Andreas Maier, and Simon Zabler.X-ray CT data completeness con- dition for sets of arbitrary projections. Tech. rep. SPIE, Oct. 2022, p. 23.doi: 10.1117/12.2646435.url:https://doi.org/10.1117/12.2646435
work page doi:10.1117/12.2646435.url:https://doi.org/10.1117/12.2646435 2022
-
[13]
Quantification of Tomographic Incompleteness in Cone-Beam Reconstruction
Rolf Clackdoyle and Frederic Noo. “Quantification of Tomographic Incompleteness in Cone-Beam Reconstruction”. In:IEEE Transactions on Radiation and Plasma Medical Sciences4.1 (Jan. 2020), pp. 63–80.issn: 2469-7311.doi:10.1109/trpms. 2019.2918222.url:https://doi.org/10.1109/trpms.2019.2918222
-
[14]
Sarah Capostagno et al. “Task-driven source–detector trajectories in cone-beam computed tomography: II. Application to neuroradiology”. In:Journal of Medical Imaging6.02 (May 2019), p. 1.issn: 2329-4302.doi:10.1117/1.jmi.6.2.025004. url:https://doi.org/10.1117/1.jmi.6.2.025004
-
[15]
Object Specific Trajectory Optimization for Industrial X-ray Computed Tomography
Andreas Fischer et al. “Object Specific Trajectory Optimization for Industrial X-ray Computed Tomography”. In:Scientific Reports6.1 (Jan. 2016).issn: 2045-2322. doi:10.1038/srep19135.url:https://doi.org/10.1038/srep19135
work page doi:10.1038/srep19135.url:https://doi.org/10.1038/srep19135 2016
-
[16]
Optimization for customized trajectories in cone beam computed tomography
Sepideh Hatamikia et al. “Optimization for customized trajectories in cone beam computed tomography”. In:Medical Physics47.10 (Aug. 2020), pp. 4786–4799. issn: 0094-2405.doi:10.1002/mp.14403.url:https://doi.org/10.1002/mp. 14403
work page doi:10.1002/mp.14403.url:https://doi.org/10.1002/mp 2020
-
[17]
Toward on-the-fly trajectory optimization for C-arm CBCT under strong kinematic constraints
Sepideh Hatamikia et al. “Toward on-the-fly trajectory optimization for C-arm CBCT under strong kinematic constraints”. In:PLOS ONE16.2 (Feb. 2021). Ed. by Li Zeng, e0245508.issn: 1932-6203.doi:10 . 1371 / journal . pone . 0245508. url:https://doi.org/10.1371/journal.pone.0245508
-
[18]
Application of Gated Recurrent Units for CT Trajectory Optimization
Yuedong Yuan, Linda-Sophie Schneider, and Andreas Maier. “Application of Gated Recurrent Units for CT Trajectory Optimization”. In:arXiv.orgabs/2405.09333 (2024)
-
[19]
Liutao Yang et al.Learning Projection Views for Sparse-View CT Reconstruction. Tech. rep. ACM, Oct. 2022, pp. 2645–2653.doi:10.1145/3503161.3548204.url: https://doi.org/10.1145/3503161.3548204
-
[20]
Philadelphia: So- ciety for Industrial and Applied Mathematics, 2001.isbn: 0898714931.doi:10
Frank Natterer.The Mathematics of Computerized Tomography. Philadelphia: So- ciety for Industrial and Applied Mathematics, 2001.isbn: 0898714931.doi:10. 1137/1.9780898719284.url:https://doi.org/10.1137/1.9780898719284
-
[21]
Review of Sparse-View or Limited-Angle CT Reconstruction Based on Deep Learning
Jianglei Di et al. “Review of Sparse-View or Limited-Angle CT Reconstruction Based on Deep Learning”. In:Laser & Optoelectronics Progress60.8 (2023), p. 0811002.issn: 1006-4125.doi:10.3788/lop230488.url:https://doi.org/ 10.3788/lop230488
-
[22]
Jiahao Chang et al. “An unsupervised sparseview CT reconstruction framework using combination of iterative deep image prior and ADMM”. In:Medical Physics 52.7 (July 2025).issn: 0094-2405.doi:10.1002/mp.17933.url:https://doi. org/10.1002/mp.17933
-
[23]
Learning 3D Gaussians for Extremely Sparse-View Cone-Beam CT Reconstruction
Yiqun Lin et al. “Learning 3D Gaussians for Extremely Sparse-View Cone-Beam CT Reconstruction”. In:International Conference on Medical Image Computing and Computer-Assisted Interventionabs/2407.01090 (2024). 40
-
[24]
Data Consistent Artifact Reduction for Limited Angle To- mography with Deep Learning Prior
Yixing Huang et al. “Data Consistent Artifact Reduction for Limited Angle To- mography with Deep Learning Prior”. In:Lecture Notes in Computer Science. Springer International Publishing, 2019, pp. 101–112.isbn: 9783030338428.doi: 10.1007/978-3-030-33843-5_10.url:https://doi.org/10.1007/978-3-030- 33843-5_10
work page doi:10.1007/978-3-030-33843-5_10.url:https://doi.org/10.1007/978-3-030- 2019
-
[25]
DRACO: differentiable reconstruction for arbitrary CBCT or- bits
Chengze Ye et al. “DRACO: differentiable reconstruction for arbitrary CBCT or- bits”. In:Physics in Medicine & Biology70.7 (Mar. 2025), p. 075005.issn: 0031-9155.doi:10.1088/1361-6560/adbb50.url:https://doi.org/10.1088/ 1361-6560/adbb50
work page doi:10.1088/1361-6560/adbb50.url:https://doi.org/10.1088/ 2025
-
[26]
Tomographic Sparse View Selection Using the View Covariance Loss
Jingsong Lin et al. “Tomographic Sparse View Selection Using the View Covariance Loss”. In:IEEE Transactions on Pattern Analysis and Machine Intelligence(2025), pp. 1–11.issn: 0162-8828.doi:10 . 1109 / tpami . 2025 . 3600072.url:https : //doi.org/10.1109/tpami.2025.3600072
-
[27]
Stephen J. Gardner et al. “Improvements in CBCT Image Quality Using a Novel Iterative Reconstruction Algorithm: A Clinical Evaluation”. In:Advances in Radi- ation Oncology4.2 (Apr. 2019), pp. 390–400.issn: 2452-1094.doi:10.1016/j. adro.2018.12.003.url:https://doi.org/10.1016/j.adro.2018.12.003
work page doi:10.1016/j 2019
-
[28]
Springer-Verlag, 2011
Thorsten M Buzug.Einf¨ uhrung in die Computertomographie: mathematisch-physikalische Grundlagen der Bildrekonstruktion. Springer-Verlag, 2011
2011
-
[29]
Frank Dennerlein et al.Exact and efficient cone-beam reconstruction algorithm for a short-scan circle combined with various lines. Tech. rep. SPIE, Apr. 2005, p. 388. doi:10.1117/12.595186.url:https://doi.org/10.1117/12.595186
work page doi:10.1117/12.595186.url:https://doi.org/10.1117/12.595186 2005
-
[30]
An inversion formula for the cone-beam transform for arbitrary source trajectories
B. Yazıcı, Zhengmin Li, and J. Pack. “An inversion formula for the cone-beam transform for arbitrary source trajectories”. In: 2012
2012
-
[31]
An exact inversion formula for cone beam vector tomography
Alexander Katsevich and Thomas Schuster. “An exact inversion formula for cone beam vector tomography”. In:Inverse Problems29.6 (May 2013), p. 065013.issn: 0266-5611.doi:10.1088/0266-5611/29/6/065013.url:https://doi.org/10. 1088/0266-5611/29/6/065013
work page doi:10.1088/0266-5611/29/6/065013.url:https://doi.org/10 2013
-
[32]
Pierre Grangeat. “Mathematical framework of cone beam 3D reconstruction via the first derivative of the radon transform”. In:Lecture Notes in Mathematics. Springer Berlin Heidelberg, 1991, pp. 66–97.isbn: 9783540549703.doi:10.1007/ bfb0084509.url:https://doi.org/10.1007/bfb0084509
-
[33]
A cone-beam reconstruction algorithm using shift-variant filtering and cone-beam backprojection
M. Defrise and R. Clack. “A cone-beam reconstruction algorithm using shift-variant filtering and cone-beam backprojection”. In:IEEE Transactions on Medical Imag- ing13.1 (Mar. 1994), pp. 186–195.issn: 0278-0062.doi:10.1109/42.276157.url: https://doi.org/10.1109/42.276157
-
[34]
An efficient Fourier method for 3-D radon inversion in exact cone-beam CT reconstruction
S. Schaller, T. Flohr, and P. Steffen. “An efficient Fourier method for 3-D radon inversion in exact cone-beam CT reconstruction”. In:IEEE Transactions on Medical Imaging17.2 (Apr. 1998), pp. 244–250.issn: 0278-0062.doi:10.1109/42.700736. url:https://doi.org/10.1109/42.700736
-
[35]
An analysis of approximations for maximizing submodular set functions—I
G. L. Nemhauser, L. A. Wolsey, and M. L. Fisher. “An analysis of approximations for maximizing submodular set functions—I”. In:Mathematical Programming14.1 (Dec. 1978), pp. 265–294.issn: 0025-5610.doi:10.1007/bf01588971.url:https: //doi.org/10.1007/bf01588971. 41
-
[36]
Approximation Algorithms for the Set Covering and Vertex Cover Problems
Dorit S. Hochbaum. “Approximation Algorithms for the Set Covering and Vertex Cover Problems”. In:SIAM Journal on Computing11.3 (Aug. 1982), pp. 555–556. issn: 0097-5397.doi:10 . 1137 / 0211045.url:https : / / doi . org / 10 . 1137 / 0211045
1982
-
[37]
Jan Vondrak.Optimal approximation for the submodular welfare problem in the value oracle model. Tech. rep. ACM, May 2008, pp. 67–74.doi:10.1145/1374376. 1374389.url:https://doi.org/10.1145/1374376.1374389
-
[38]
Monotone Submodular Maximization over a Ma- troid via Non-Oblivious Local Search
Yuval Filmus and Justin Ward. “Monotone Submodular Maximization over a Ma- troid via Non-Oblivious Local Search”. In:SIAM Journal on Computing43.2 (Jan. 2014), pp. 514–542.issn: 0097-5397.doi:10.1137/130920277.url:https:// doi.org/10.1137/130920277
-
[39]
2024.url:https: //www.gurobi.com
Gurobi Optimization, LLC.Gurobi Optimizer Reference Manual. 2024.url:https: //www.gurobi.com
2024
-
[40]
J¨ urgen Frikel and Eric Todd Quinto. “Characterization and reduction of artifacts in limited angle tomography”. In:Inverse Problems29.12 (Nov. 2013), p. 125007. issn: 0266-5611.doi:10.1088/0266- 5611/29/12/125007.url:https://doi. org/10.1088/0266-5611/29/12/125007
-
[41]
Garey and David S
Michael R. Garey and David S. Johnson.Computers and Intractability: A Guide to the Theory of NP-Completeness. San Francisco: W. H. Freeman, 1979.isbn: 0716710455
1979
-
[42]
Communication in the Presence of Noise
C.E. Shannon. “Communication in the Presence of Noise”. In:Proceedings of the IRE37.1 (Jan. 1949), pp. 10–21.issn: 0096-8390.doi:10.1109/jrproc.1949. 232969.url:https://doi.org/10.1109/jrproc.1949.232969
-
[43]
Measurement of Areas on a Sphere Using Fibonacci and Latitude– Longitude Lattices
´Alvaro Gonz´ alez. “Measurement of Areas on a Sphere Using Fibonacci and Latitude– Longitude Lattices”. In:Mathematical Geosciences42.1 (Nov. 2009), pp. 49–64. issn: 1874-8961.doi:10.1007/s11004-009-9257-x.url:https://doi.org/10. 1007/s11004-009-9257-x
work page doi:10.1007/s11004-009-9257-x.url:https://doi.org/10 2009
-
[44]
Wiley-Interscience Series in Discrete Mathematics and Optimization
Alexander Schrijver.Theory of Linear and Integer Programming. Wiley-Interscience Series in Discrete Mathematics and Optimization. Chichester: John Wiley & Sons, 1998.isbn: 9780471982326.url:https://www.wiley.com/en- us/Theory+of+ Linear+and+Integer+Programming-p-9780471982326
1998
-
[45]
Branch and Bound in Mixed Integer Linear Program- ming Problems: A Survey of Techniques and Trends
Lingying Huang et al. “Branch and Bound in Mixed Integer Linear Program- ming Problems: A Survey of Techniques and Trends”. In:arXiv.orgabs/2111.06257 (2021)
-
[46]
ABC: A Big CAD Model Dataset for Geometric Deep Learn- ing
Sebastian Koch et al. “ABC: A Big CAD Model Dataset for Geometric Deep Learn- ing”. In:Proceedings of the IEEE/CVF Conference on Computer Vision and Pat- tern Recognition (CVPR). 2019, pp. 9601–9611
2019
-
[47]
Linda-Sophie Schneider Yipeng Sun.diffct-mlx: Differentiable CT for Apple Silicon. 2026
2026
-
[48]
Emil Y. Sidky and Xiaochuan Pan. “Image reconstruction in circular cone-beam computed tomography by constrained, total-variation minimization”. In:Physics in Medicine and Biology53.17 (2008), pp. 4777–4807.doi:10.1088/0031-9155/ 53/17/021.url:https://doi.org/10.1088/0031-9155/53/17/021. 42
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.