Metropolis-Scale Resilient and Trustworthy Traffic Flow Inference Using Multi-Source Data
Pith reviewed 2026-06-30 12:32 UTC · model grok-4.3
The pith
TA-ANP fuses floating car data with fixed sensors to infer network-wide traffic states with trustworthy uncertainty at metropolis scale.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
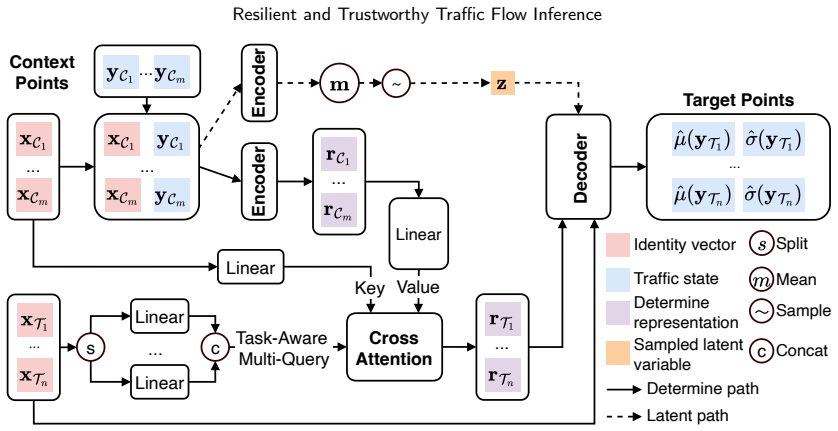
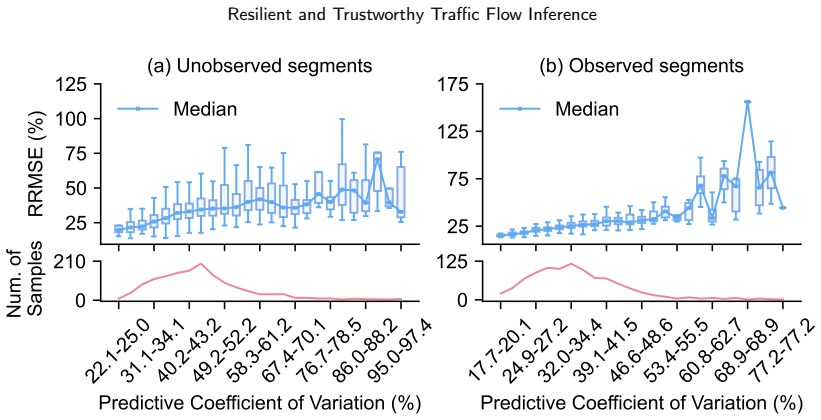
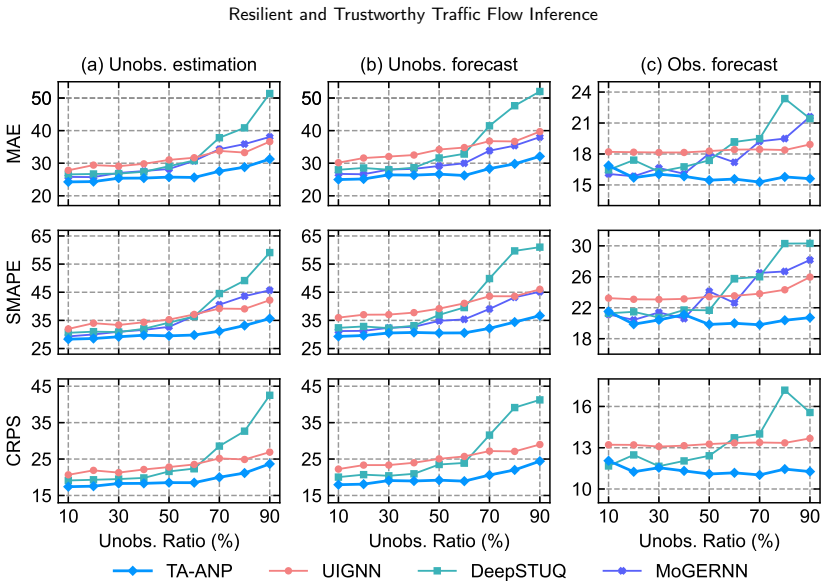
By casting GTSI as a stochastic process, TA-ANP leverages the meta-learning properties of neural processes to adapt rapidly to changes in sensing configurations without retraining. A task-aware multi-query attention module with distinct spatiotemporal inductive biases is introduced to jointly handle three GTSI sub-tasks, while mitigating cross-task interference. For uncertainty quantification, we combine neural processes with Monte Carlo Dropout to capture both aleatoric and epistemic uncertainty. Experiments on MMTD show that TA-ANP achieves state-of-the-art performance across all sub-tasks under deterministic and probabilistic metrics.
What carries the argument
Task-Aware Attentive Neural Process (TA-ANP), a unified probabilistic framework that casts traffic inference as a stochastic process and adds a task-aware multi-query attention module to handle multiple sub-tasks jointly.
If this is right
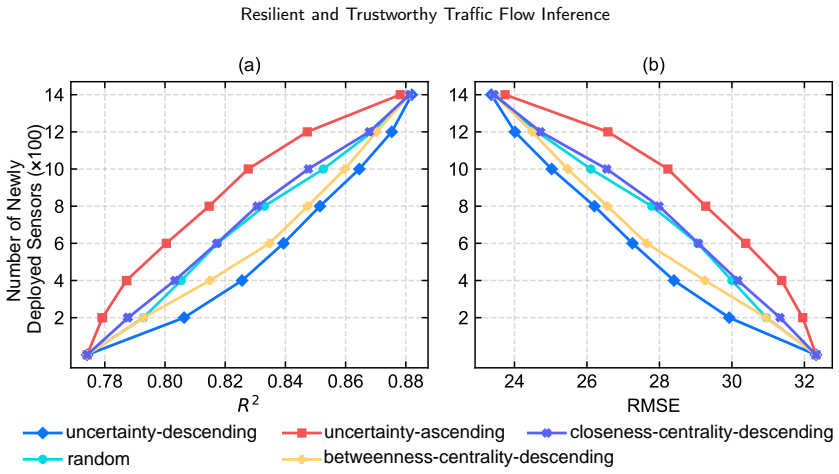
- Well-calibrated uncertainties enable more efficient fixed-sensor placement with fewer sensor deployments.
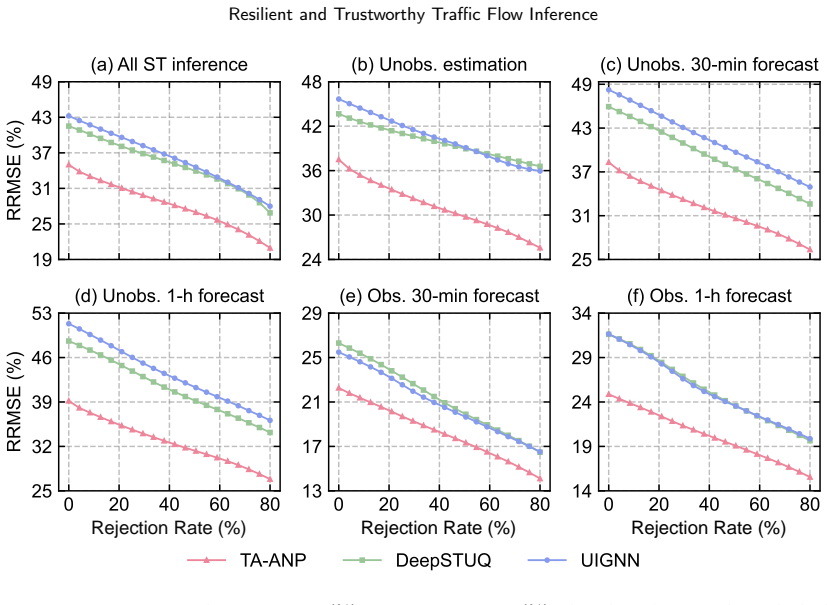
- TA-ANP demonstrates superior resilience in terms of disturbance absorption, performance recovery, and adaptability to unseen sensing configurations under a Damage-Repair-Addition sensing lifecycle.
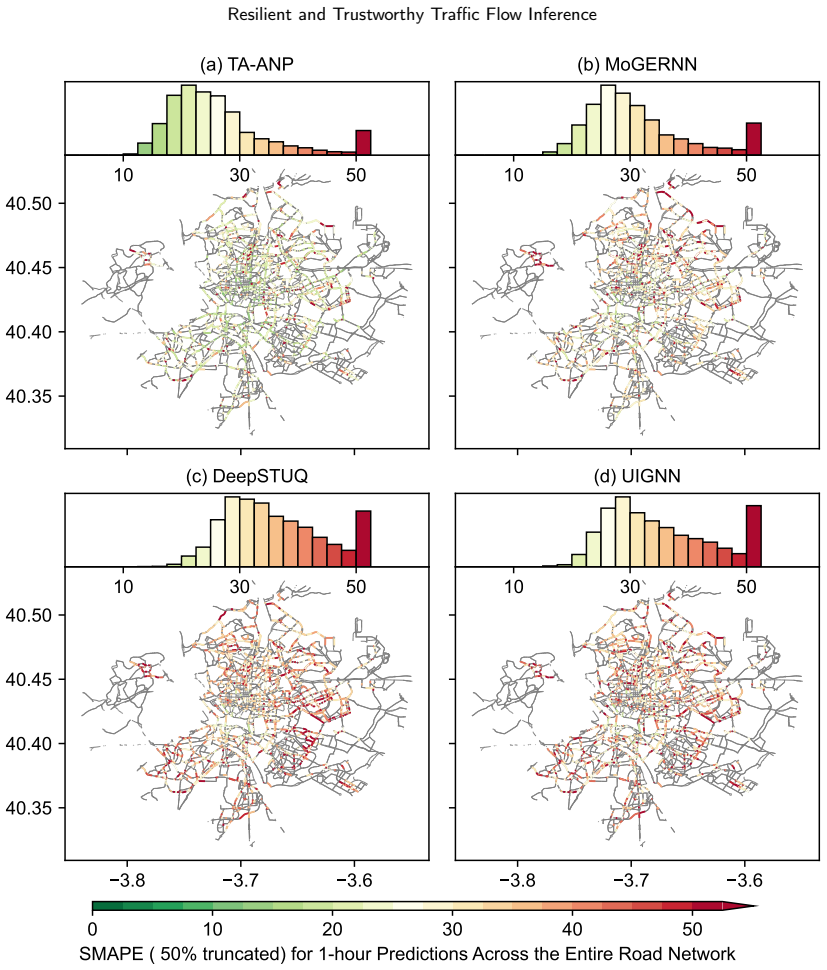
- The model achieves state-of-the-art performance across all GTSI sub-tasks under both deterministic and probabilistic metrics on the MMTD dataset.
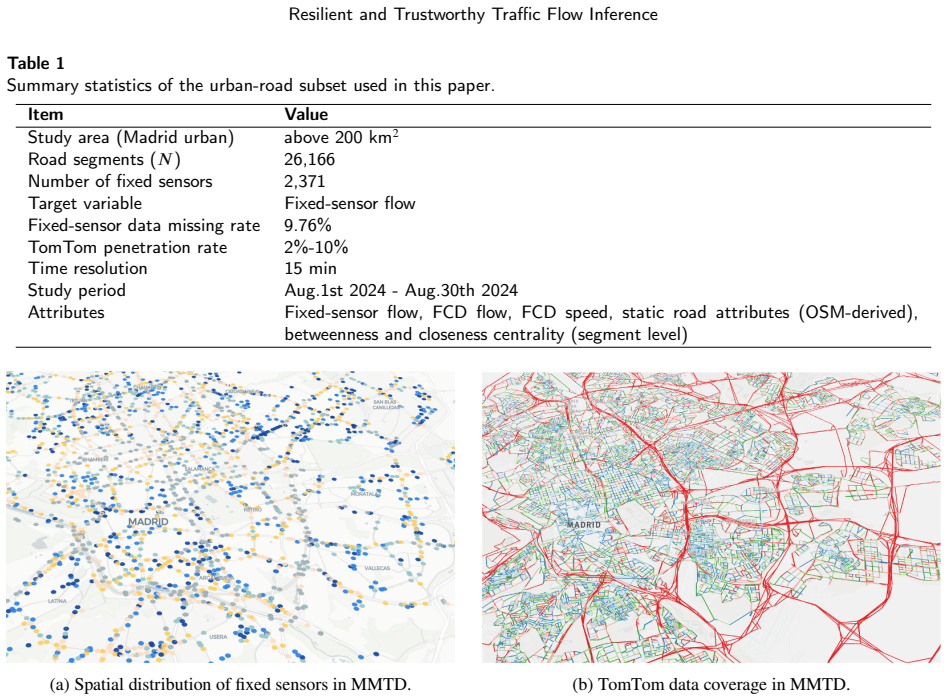
- Fusion of floating car data with sparse fixed-detector measurements produces trustworthy uncertainty estimates at the scale of 2,371 road segments.
Where Pith is reading between the lines
- The same meta-learning structure could support other spatial prediction tasks where observation networks change over time, such as environmental monitoring.
- Calibrated uncertainties might feed directly into traffic control algorithms to adjust routing or signal timing under partial sensor failure.
- Joint multi-task handling could reduce computational overhead in other domains that require simultaneous prediction of related quantities on networks.
Load-bearing premise
The meta-learning properties of neural processes allow rapid adaptation to changes in sensing configurations without retraining, and the task-aware multi-query attention module can jointly handle the three GTSI sub-tasks while mitigating cross-task interference.
What would settle it
If TA-ANP requires retraining or shows no performance recovery when tested on new sensing configurations during a Damage-Repair-Addition lifecycle experiment, the claim of rapid adaptation without retraining would be falsified.
Figures





read the original abstract
Inferring network-wide traffic states from sparse observations with high accuracy and trustworthy uncertainty quantification is essential for intelligent transportation systems, yet it remains challenging due to the underdetermined nature of the problem, multifaceted disturbances in sensing networks, and the inherent conflicts among multiple inference sub-tasks when modeled jointly. We propose the Task-Aware Attentive Neural Process (TA-ANP), a unified probabilistic framework for resilient and trustworthy global traffic state inference (GTSI) by fusing floating car data (FCD) with sparse fixed-detector measurements. By casting GTSI as a stochastic process, TA-ANP leverages the meta-learning properties of neural processes to adapt rapidly to changes in sensing configurations without retraining. A task-aware multi-query attention module with distinct spatiotemporal inductive biases is introduced to jointly handle three GTSI sub-tasks, while mitigating cross-task interference. For uncertainty quantification, we combine neural processes with Monte Carlo Dropout to capture both aleatoric and epistemic uncertainty. To support metropolis-scale evaluation, we construct the Metropolitan Multi-Source Traffic Dataset (MMTD), integrating fixed-loop sensor measurements, FCD statistics, and OpenStreetMap road-network data over an urban network of 2,371 road segments. Experiments on MMTD show that TA-ANP achieves state-of-the-art performance across all sub-tasks under deterministic and probabilistic metrics. The resulting well-calibrated uncertainties enable more efficient fixed-sensor placement with fewer sensor deployments. Under a Damage-Repair-Addition sensing lifecycle, TA-ANP demonstrates superior resilience in terms of disturbance absorption, performance recovery, and adaptability to unseen sensing configurations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes the Task-Aware Attentive Neural Process (TA-ANP), a unified probabilistic framework for global traffic state inference (GTSI) that fuses floating car data with sparse fixed-detector measurements. It casts GTSI as a stochastic process and leverages neural-process meta-learning for rapid adaptation to sensing-configuration changes without retraining. A task-aware multi-query attention module with distinct spatiotemporal inductive biases jointly handles three GTSI sub-tasks while mitigating interference; uncertainty is quantified by combining neural processes with Monte Carlo Dropout. The authors introduce the Metropolitan Multi-Source Traffic Dataset (MMTD) covering 2,371 road segments and report that TA-ANP attains state-of-the-art performance on deterministic and probabilistic metrics while demonstrating superior resilience under a Damage-Repair-Addition sensing lifecycle.
Significance. If the experimental claims hold with appropriate baselines and ablations, the work offers a practical advance for intelligent transportation systems by supplying a single model that is simultaneously multi-task, uncertainty-aware, and resilient to sensing-network disturbances. The meta-learning adaptation property and the new MMTD dataset are potentially reusable contributions. Well-calibrated uncertainties that support more efficient fixed-sensor placement address a concrete deployment need.
minor comments (3)
- [Abstract] Abstract: the SOTA claim is stated without naming the competing methods or reporting any numerical margins; the experiments section should therefore include an explicit table that lists all baselines, their hyper-parameter settings, and the precise metric values that support the claim.
- [Methodology] The description of the task-aware multi-query attention module would benefit from a diagram or pseudocode showing how the distinct spatiotemporal inductive biases are realized and how the attention masks prevent cross-task interference.
- [Experiments] The Damage-Repair-Addition lifecycle experiments should report the number of independent runs and any statistical significance tests used to support the statements of 'superior resilience' and 'performance recovery'.
Simulated Author's Rebuttal
We thank the referee for the positive summary, significance assessment, and recommendation of minor revision. We are pleased that the unified probabilistic framework, meta-learning adaptation, MMTD dataset, and well-calibrated uncertainties are recognized as practical contributions for intelligent transportation systems.
Circularity Check
No significant circularity detected
full rationale
The paper proposes TA-ANP, a neural-process-based model for GTSI that fuses FCD and fixed-detector data. Its central claims rest on architectural choices (task-aware attention, Monte Carlo Dropout for uncertainty) and empirical evaluation on the constructed MMTD dataset under deterministic/probabilistic metrics and Damage-Repair-Addition lifecycle scenarios. No derivation chain, equations, or fitting procedure is described that reduces any claimed prediction or result to its own inputs by construction. No self-citation load-bearing steps, uniqueness theorems, or ansatzes imported from prior author work are invoked in the provided text. The experiments constitute independent tests of the stated mechanisms rather than tautological outputs.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Neural processes possess meta-learning properties that enable rapid adaptation to new sensing configurations without retraining.
- domain assumption A task-aware multi-query attention module with distinct spatiotemporal inductive biases can jointly solve three sub-tasks while mitigating cross-task interference.
Reference graph
Works this paper leans on
-
[1]
doi:10.1038/s44260-024-00014-y. Ayuntamiento de Madrid, 2026a. Número de carriles por calles. Open data portal dataset. URL:https://datos.madrid.es/dataset/ 300723-0-carriles-mapas. accessed: 2025-08. Ayuntamiento de Madrid, 2026b. Tráfico. histórico de datos del tráfico desde
-
[2]
URL:https://datos.madrid
Open data portal dataset. URL:https://datos.madrid. es/dataset/208627-0-transporte-ptomedida-historico. accessed: 2025-08. Bahadori, M.T., Yu, Q.R., Liu, Y.,
2025
-
[3]
IEEE Transactions on Intelligent Transportation Systems , 1–15doi:10.1109/TITS.2026.3675623
Dynamic od estimation using spatio-temporal hybrid graph convolutional network with asynchronous multi-source data. IEEE Transactions on Intelligent Transportation Systems , 1–15doi:10.1109/TITS.2026.3675623. Cheng, L., Lei, D., Tao, S.,
-
[4]
Transport Reviews 44, 1129–1135
Recent advances in deep learning for traffic probabilistic prediction. Transport Reviews 44, 1129–1135. Ding,C.,Song,Y.,Zhang,H.,Wang,T.,2025. UncertaintyquantificationinBayesianphysics-informeddeeplearning-basedtrafficstateprediction. Computer-Aided Civil and Infrastructure Engineering , n/a–n/a. Do, L.N., Vu, H.L., Vo, B.Q., Liu, Z., Phung, D.,
2025
-
[5]
Dropout as a Bayesian Approximation: Representing Model Uncertainty in Deep Learning, in: Proceedings of The 33rd International Conference on Machine Learning, PMLR. pp. 1050–1059. Garnelo, M., Rosenbaum, D., Maddison, C., Ramalho, T., Saxton, D., Shanahan, M., Teh, Y.W., Rezende, D., Eslami, S.M.A., 2018a. Conditional Neural Processes, in: Proceedings of...
work page internal anchor Pith review Pith/arXiv arXiv
-
[6]
Artificial Intelligence Review 56, 1513–1589
A survey of uncertainty in deep neural networks. Artificial Intelligence Review 56, 1513–1589. Guarda,P.,Battifarano,M.,Qian,S.,2024. Estimatingnetworkflowandtravelbehaviorusingday-to-daysystem-leveldata:Acomputationalgraph approach. Transportation Research Part C: Emerging Technologies 158, 104409. Han, X., Zheng, H., Zhou, M.,
2024
-
[7]
Hüllermeier,E.,Waegeman,W.,2021
Card: classification and regression diffusion models, in: Proceedings of the 36th International Conference on Neural Information Processing Systems, Curran Associates Inc., Red Hook, NY, USA. Hüllermeier,E.,Waegeman,W.,2021. Aleatoricandepistemicuncertaintyinmachinelearning:Anintroductiontoconceptsandmethods. Machine Learning 110, 457–506. Kendall,A.,Gal,...
2021
-
[8]
A Large-Scale and Data-Based Road Traffic Flow Estimation Method Leveraging Topography Information and Population Statistics, in: 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), pp. 2343–
2022
-
[9]
IEEE Transactions on Intelligent Transportation Systems 23, 18962–18974
Bayesian kernelized matrix factorization for spatiotemporal traffic data imputation and kriging. IEEE Transactions on Intelligent Transportation Systems 23, 18962–18974. Li,C.,Wang,W.,Solé-Ribalta,A.,Borge-Holthoefer,J.,Jia,B.,Liu,Z.,Yu,B.,Gao,Z.,Gao,J.,2025. Adaptivecapacityformultimodaltransport network resilience to extreme floods. Nature Sustainabilit...
2025
-
[10]
Reliability Engineering & System Safety 274, 112424
Quantifying predictive resilience: A fault-tolerant forecasting framework with operational boundaries for natural hazards. Reliability Engineering & System Safety 274, 112424. doi:10.1016/j.ress.2026.112424. Liu,Y.,Hu,T.,Zhang,H.,Wu,H.,Wang,S.,Ma,L.,Long,M.,2024b. itransformer:Invertedtransformersareeffectivefortimeseriesforecasting, in: The Twelfth Inter...
-
[11]
Transportation Research Part C: Emerging Technologies 108, 130–150
A tailored machine learning approach for urban transport network flow estimation. Transportation Research Part C: Emerging Technologies 108, 130–150. Ma,W.,Pi,X.,Qian,S.,2020. Estimatingmulti-classdynamicorigin-destinationdemandthroughaforward-backwardalgorithmoncomputational graphs. Transportation Research Part C: Emerging Technologies 119, 102747. Maljk...
-
[12]
1223–1228
Uncertainty-aware traffic prediction under missing data, in: 2023 IEEE International Conference on Data Mining (ICDM), pp. 1223–1228. Meng,C.,Yi,X.,Su,L.,Gao,J.,Zheng,Y.,2017.City-wideTrafficVolumeInferencewithLoopDetectorDataandTaxiTrajectories,in:Proceedings of the 25th ACM SIGSPATIAL International Conference on Advances in Geographic Information System...
2023
-
[13]
992–1004
Uncertainty Quantification for Traffic Forecasting: A Unified Approach, in: 2023 IEEE 39th International Conference on Data Engineering (ICDE), pp. 992–1004. Roth,A.,Liebig,T.,2022. Forecastingunobservednodestateswithspatio-temporalgraphneuralnetworks,in:2022IEEEInternationalConference on Data Mining Workshops (ICDMW), pp. 740–747. Sengupta, A., Mondal, S...
2023
-
[14]
Proceedings of the AAAI Conference on Artificial Intelligence 34, 914–921
Spatial-temporal synchronous graph convolutional networks: A new framework for spatial-temporal network data forecasting. Proceedings of the AAAI Conference on Artificial Intelligence 34, 914–921. Song,Q.,Ge,H.,Caverlee,J.,Hu,X.,2019. TensorCompletionAlgorithmsinBigDataAnalytics. ACMTrans.Knowl.Discov.Data13,6:1–6:48. Sun,L.,Zhang,Y.,Axenie,C.,Grossi,M.,K...
-
[15]
Developer documentation
Tomtom move: Traffic stats — introduction. Developer documentation. URL:https://developer.tomtom.com/ move-portal/guides/traffic-stats/introduction. accessed: 2025-08. Valdenegro-Toro,M.,Mori,D.S.,2022. ADeeperLookintoAleatoricandEpistemicUncertaintyDisentanglement,in:2022IEEE/CVFConference on Computer Vision and Pattern Recognition Workshops (CVPRW), pp....
2025
-
[16]
IEEE Transactions on Intelligent Transportation Systems 23, 16137–16147
Hierarchical traffic flow prediction based on spatial-temporal graph convolutional network. IEEE Transactions on Intelligent Transportation Systems 23, 16137–16147. Wang,Q.,Yang,K.,2024.Privacy-preservingdatafusionfortrafficstateestimation:Averticalfederatedlearningapproach.TransportationResearch Part C: Emerging Technologies , 104743. Wang,T.,Li,Y.,Cheng...
2024
-
[17]
IEEE Transactions on Intelligent Transportation Systems 26, 18637–18652
Multi-source urban traffic flow forecasting with drone and loop detector data. IEEE Transactions on Intelligent Transportation Systems 26, 18637–18652. doi:10.1109/TITS.2025.3605014. Xiong, W., Fonod, R., Geroliminis, N.,
-
[18]
Unveiling Stochasticity: Universal Multi-modal Probabilistic Modeling for Traffic Forecasting
Unveiling Stochasticity: Universal Multi-modal Probabilistic Modeling for Traffic Forecasting. doi:10.48550/arXiv.2604.16084,arXiv:2604.16084. Xu, D., Tang, Y., Peng, H., Guo, H., Xuan, Q.,
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2604.16084
-
[19]
Transportation Research Part C-Emerging Technologies 117, 102635
GE-GAN: A novel deep learning framework for road traffic state estimation. Transportation Research Part C-Emerging Technologies 117, 102635. Xu,M.,Di,Y.,Ding,H.,Zhu,Z.,Chen,X.,Yang,H.,2023. AGNP:Network-wideshort-termprobabilistictrafficspeedpredictionandimputation. Communications in Transportation Research 3, 100099. Xu, Q., Long, C., Li, Z., Ruan, S., Z...
2023
-
[20]
IEEE Transactions on Intelligent Transportation Systems 25, 4443–4457
Network-wide traffic flow dynamics prediction leveraging macroscopic traffic flow model and deep neural networks. IEEE Transactions on Intelligent Transportation Systems 25, 4443–4457. Yao,K.,Chen,L.,Chen,S.,2025. Time-evolvingtrafficresilienceperformanceforecastingduringhazardousweathertowardproactiveintervention. Reliability Engineering & System Safety ...
2025
-
[21]
Transportation Research Part C: Emerging Technologies 121, 102870
Network-wide traffic flow estimation with insufficient volume detection and crowdsourcing data. Transportation Research Part C: Emerging Technologies 121, 102870. Zhao,L.,Song,Y.,Zhang,C.,Liu,Y.,Wang,P.,Lin,T.,Deng,M.,Li,H.,2020. T-gcn:Atemporalgraphconvolutionalnetworkfortrafficprediction. IEEE Transactions on Intelligent Transportation Systems 21, 3848–...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.