Guided Flow Matching for Forward and Inverse PDE Problems with Sparse Observations: Algorithm and Theory
Pith reviewed 2026-06-29 20:50 UTC · model grok-4.3
The pith
A flow-matching model learns joint PDE parameter-solution distributions and uses guided sampling to solve both forward and inverse problems from sparse observations with proven error bounds.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
FM4PDE learns the joint distribution of PDE coefficients and solutions via flow matching, then performs forward and inverse tasks by guided sampling that minimizes a composite loss of sparse measurement agreement and PDE residual; the deterministic guided procedure achieves logarithmic complexity under coercivity that ensures trajectory boundedness, the stochastic procedure with adaptive guidance achieves polynomial-time error bounds under dissipativity that yields uniform moment bounds independent of the noise-floor parameter, a matching lower bound shows constant guidance induces positive bias, and a hybrid deterministic-stochastic analysis is also supplied.
What carries the argument
The guided sampling procedure inside the flow-matching model, which at each step optimizes a composite loss combining data fidelity to sparse observations and PDE residual reduction, with convergence rates controlled by coercivity for deterministic paths and dissipativity for stochastic paths.
If this is right
- The deterministic guided optimizer attains logarithmic complexity in the target accuracy under the coercivity condition.
- The stochastic sampler with adaptive guidance attains polynomial-time error bounds under dissipativity of the velocity field.
- Constant guidance in the stochastic sampler produces an unavoidable positive bias, as established by a matching lower bound.
- A hybrid deterministic-stochastic sampler also admits an error analysis.
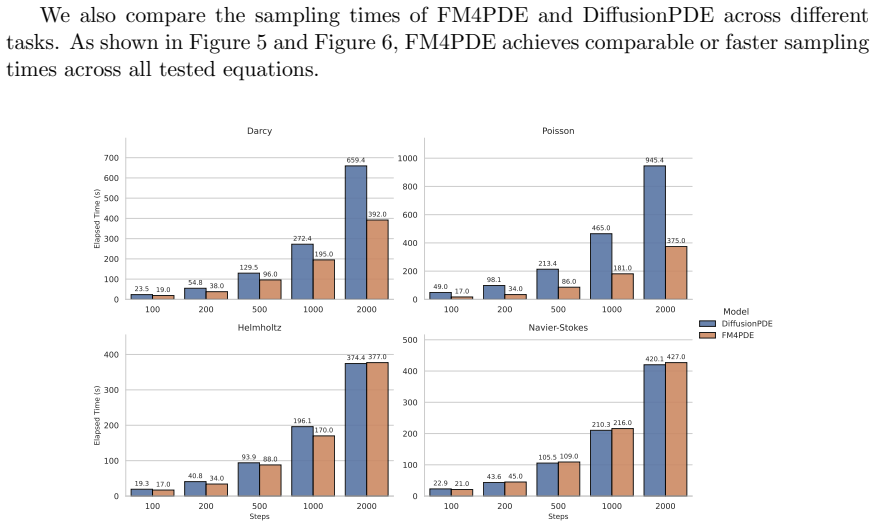
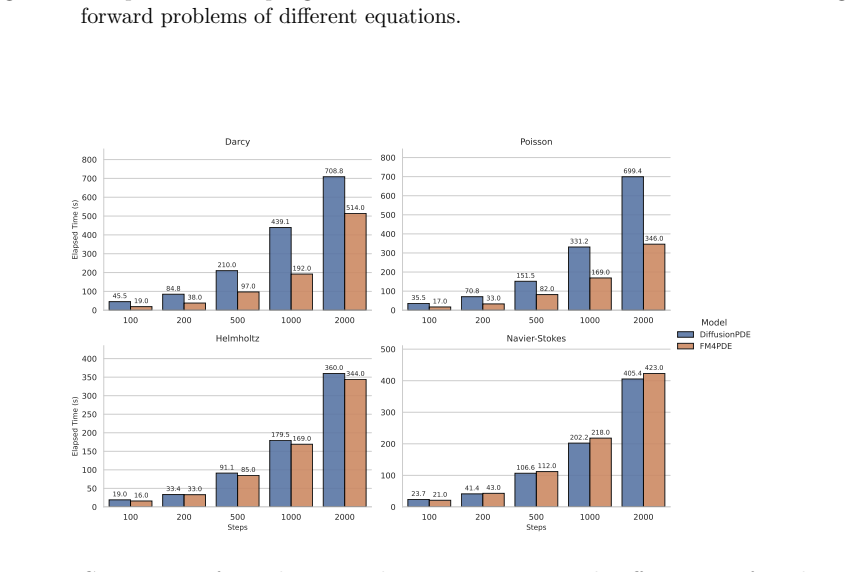
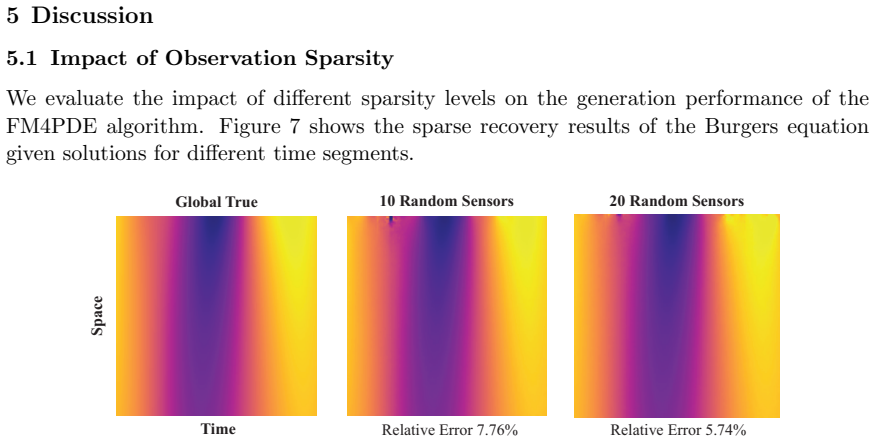
- Experiments on static and time-dependent benchmark PDEs show competitive accuracy together with faster inference than diffusion-based generative models.
Where Pith is reading between the lines
- The necessity of adaptive guidance to avoid bias may apply to conditional generation tasks in other inverse problems that rely on fixed guidance schedules.
- The same joint-distribution model could be used inside optimization loops that repeatedly solve both forward and inverse PDE problems, reducing the need for separate surrogate models.
- Uniform moment bounds independent of noise floor may allow the method to scale to higher-dimensional or multi-scale PDEs where observation noise varies across regimes.
- The composite guidance loss could be augmented with additional physical invariants beyond the PDE residual without changing the overall convergence framework.
Load-bearing premise
The error guarantees depend on a coercivity condition that keeps deterministic trajectories bounded and on dissipativity of the velocity field that supplies uniform moment bounds independent of the noise-floor parameter for the stochastic sampler.
What would settle it
An experiment in which the deterministic sampler's trajectories become unbounded in the absence of the coercivity condition, or in which the stochastic sampler with constant (non-adaptive) guidance exhibits a bias that fails to decrease with more steps, would falsify the central claims.
Figures



read the original abstract
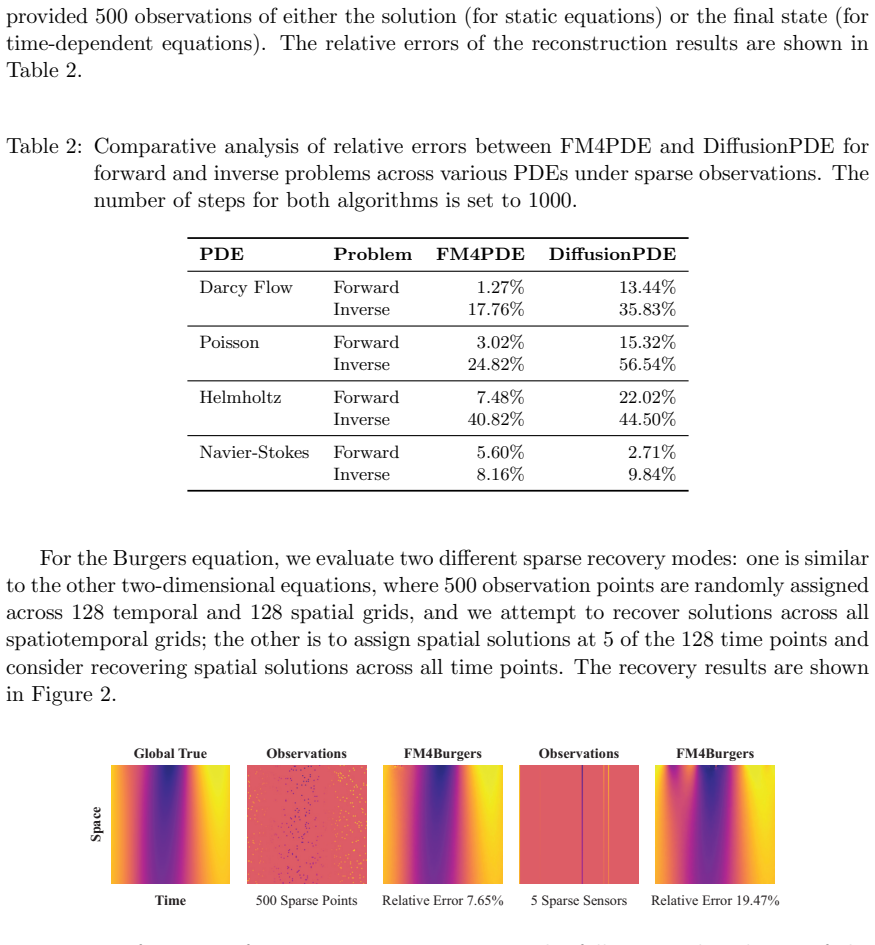
Reconstructing PDE solutions from sparse observations is a core challenge in scientific computing. We present FM4PDE, a flow-matching generative framework that learns the joint distribution of PDE coefficients (or initial states) and solutions (or final states), enabling both forward simulation and inverse recovery with limited paired data. At inference, sampling is guided by a composite loss that enforces agreement with sparse measurements and reduces the PDE residual; we support deterministic, stochastic, and hybrid samplers. We provide error guarantees for these guided procedures. For the deterministic optimizer, a coercivity condition ensures trajectory boundedness and a phase-wise contraction yields logarithmic complexity in the target accuracy. For the stochastic sampler, we introduce adaptive guidance and assume dissipativity of the velocity field to obtain uniform moment bounds independent of the noise-floor parameter. This leads to polynomial-time error bounds, and a matching lower bound shows constant guidance induces an unavoidable positive bias, motivating adaptivity. A hybrid deterministic-stochastic analysis is also provided. Experiments on static and time-dependent benchmark PDEs demonstrate competitive accuracy and faster inference than diffusion-based generative models.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes FM4PDE, a flow-matching generative framework for forward and inverse PDE problems with sparse observations. It learns the joint distribution of PDE coefficients (or initial states) and solutions (or final states) from limited paired data. At inference, sampling is guided by a composite loss enforcing agreement with sparse measurements and reducing the PDE residual. The framework supports deterministic, stochastic, and hybrid samplers. Error guarantees are provided: for the deterministic optimizer, a coercivity condition ensures trajectory boundedness and logarithmic complexity via phase-wise contraction; for the stochastic sampler, dissipativity of the velocity field yields uniform moment bounds independent of the noise-floor parameter, leading to polynomial-time error bounds under adaptive guidance. A matching lower bound shows constant guidance induces bias, motivating adaptivity. A hybrid analysis is also given. Experiments on benchmark PDEs demonstrate competitive accuracy and faster inference than diffusion-based models.
Significance. If the conditional error bounds hold under the stated assumptions, the work supplies a theoretically grounded approach to guided generative modeling for PDE reconstruction, with explicit coercivity and dissipativity conditions that make the guarantees verifiable in principle. The matching lower bound on constant guidance strengthens the motivation for adaptivity, and the hybrid sampler analysis broadens applicability. Empirical results on static and time-dependent benchmarks, combined with the algorithmic description, add practical value to the intersection of flow matching and scientific computing.
major comments (2)
- [§3 (coercivity and deterministic sampler)] The coercivity condition (abstract and §3) is load-bearing for the logarithmic complexity claim of the deterministic sampler, yet the manuscript provides no verification or sufficient condition under which the benchmark PDEs satisfy bounded trajectories; without this, the phase-wise contraction argument remains conditional on an untested hypothesis for the reported experiments.
- [§4 (stochastic sampler and dissipativity)] Theorem on stochastic sampler (abstract and §4): the transition from dissipativity of the velocity field to uniform moment bounds independent of the noise-floor parameter under adaptive guidance requires explicit tracking of constants to confirm the claimed polynomial-time dependence; the current presentation leaves the dependence on the adaptivity schedule implicit.
minor comments (3)
- [Methods] The composite loss function used for guidance should be given an explicit equation number and definition early in the methods section to improve readability.
- [Notation] Notation for the velocity field and guidance parameters is introduced without a consolidated table; a notation summary would aid cross-referencing between theory and experiments.
- [Experiments] The experimental section would benefit from reporting the observed PDE residual values alongside the reconstruction error to directly link to the guidance objective.
Simulated Author's Rebuttal
We thank the referee for the positive assessment, the recommendation of minor revision, and the constructive comments on the theoretical sections. We address each major comment below.
read point-by-point responses
-
Referee: [§3 (coercivity and deterministic sampler)] The coercivity condition (abstract and §3) is load-bearing for the logarithmic complexity claim of the deterministic sampler, yet the manuscript provides no verification or sufficient condition under which the benchmark PDEs satisfy bounded trajectories; without this, the phase-wise contraction argument remains conditional on an untested hypothesis for the reported experiments.
Authors: The coercivity condition is explicitly stated as an assumption required for trajectory boundedness and the subsequent phase-wise contraction argument in §3. We agree that the manuscript would benefit from additional discussion of sufficient conditions under which this holds for the benchmark PDEs. In the revision we will add a brief paragraph in §3 (and a corresponding note in the experiments section) providing verifiable sufficient conditions based on standard well-posedness assumptions for the considered elliptic and parabolic PDEs (bounded coefficients, Lipschitz domains, and a priori solution bounds), confirming that the reported experiments fall within the regime where the condition is satisfied. revision: yes
-
Referee: [§4 (stochastic sampler and dissipativity)] Theorem on stochastic sampler (abstract and §4): the transition from dissipativity of the velocity field to uniform moment bounds independent of the noise-floor parameter under adaptive guidance requires explicit tracking of constants to confirm the claimed polynomial-time dependence; the current presentation leaves the dependence on the adaptivity schedule implicit.
Authors: The proof in §4 derives the uniform moment bounds from the dissipativity assumption on the velocity field, with the adaptive guidance schedule controlling the growth of moments independently of the noise-floor parameter. We acknowledge that the dependence of the final polynomial-time bound on the specific form of the adaptivity schedule is not written out explicitly. In the revision we will add a remark immediately after the theorem statement (and a short appendix entry) that tracks the relevant constants through the dissipativity and adaptivity parameters, thereby making the polynomial dependence on target accuracy fully explicit. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper presents conditional error bounds for guided flow-matching samplers, explicitly assuming coercivity (for deterministic trajectory boundedness and logarithmic complexity) and dissipativity (for stochastic moment bounds independent of noise floor). These are framed as external conditions on the velocity field, not derived from or equivalent to the model's fitted quantities or outputs by construction. No self-citations, fitted-input predictions, or ansatz smuggling appear in the derivation chain; the analysis is self-contained against the stated assumptions and external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Coercivity condition ensures trajectory boundedness and phase-wise contraction for deterministic sampler
- domain assumption Dissipativity of the velocity field yields uniform moment bounds independent of noise-floor parameter
Reference graph
Works this paper leans on
- [1]
- [2]
- [3]
-
[4]
Classifier-Free Diffusion Guidance
J. Ho and T. Salimans. Classifier-free diffusion guidance.arXiv preprint arXiv:2207.12598,
work page internal anchor Pith review Pith/arXiv arXiv
-
[5]
C.-H. Lai, Y. Song, D. Kim, Y. Mitsufuji, and S. Ermon. The principles of diffusion models. arXiv preprint arXiv:2510.21890,
work page internal anchor Pith review Pith/arXiv arXiv
-
[6]
Z. Li, N. Kovachki, K. Azizzadenesheli, B. Liu, K. Bhattacharya, A. Stuart, and A. Anand- kumar. Fourier neural operator for parametric partial differential equations.arXiv preprint arXiv:2010.08895,
work page internal anchor Pith review Pith/arXiv arXiv 2010
-
[7]
Flow Matching for Generative Modeling
Y. Lipman, R. T. Chen, H. Ben-Hamu, M. Nickel, and M. Le. Flow matching for generative modeling.arXiv preprint arXiv:2210.02747,
work page internal anchor Pith review Pith/arXiv arXiv
-
[8]
Y. Lipman, M. Havasi, P. Holderrieth, N. Shaul, M. Le, B. Karrer, R. T. Chen, D. Lopez- Paz, H. Ben-Hamu, and I. Gat. Flow matching guide and code.arXiv preprint arXiv:2412.06264,
work page internal anchor Pith review Pith/arXiv arXiv
-
[9]
S. Singh and I. Fischer. Stochastic sampling from deterministic flow models.arXiv preprint arXiv:2410.02217,
-
[10]
U. Utkarsh, P. Cai, A. Edelman, R. Gomez-Bombarelli, and C. V. Rackauckas. Physics- constrained flow matching: Sampling generative models with hard constraints.arXiv preprint arXiv:2506.04171,
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.