LRDDv3: High-Resolution Long-Range Drone Detection Dataset with Range Information and Thermal Data
Pith reviewed 2026-06-29 22:31 UTC · model grok-4.3
The pith
A new dataset supplies 102,532 4K long-range drone RGB images paired with thermal data and range measurements collected across eight months.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
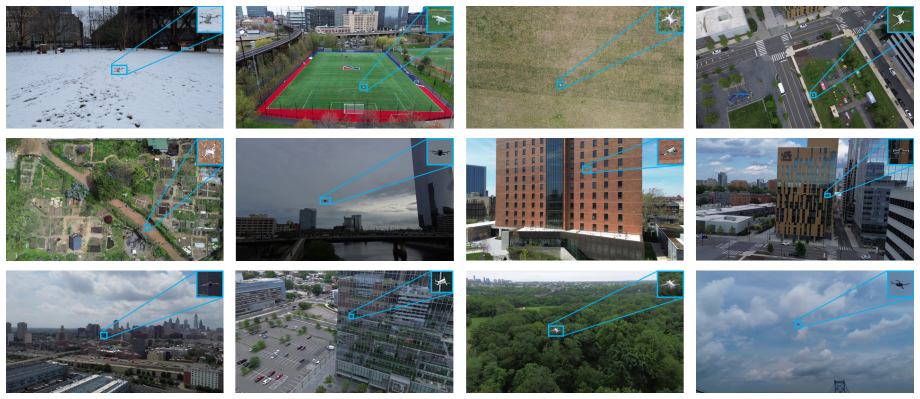
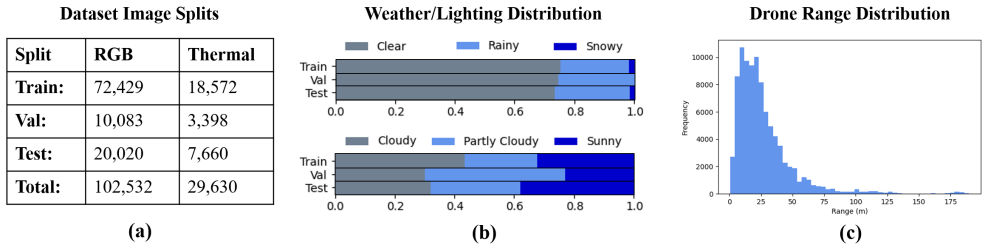
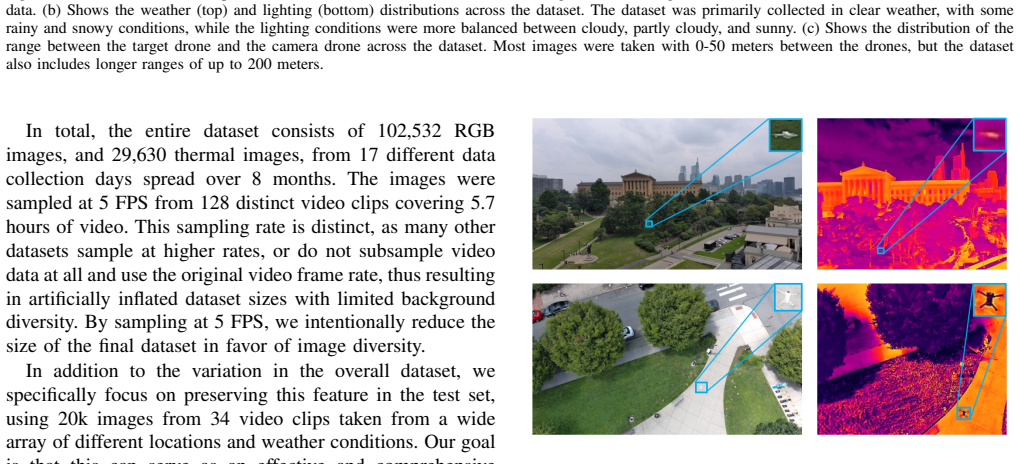
The authors release LRDDv3 containing 102,532 long-range RGB images at 4K resolution sampled at 5 FPS from 128 distinct mid-flight video clips, together with range annotations for every frame and 29,630 paired 640x512 IR images, gathered across 17 collection days distributed over eight months to capture diversity in lighting scenarios, flight locations, and background elements.
What carries the argument
The LRDDv3 dataset, built around 4K RGB frames paired with 640x512 thermal images and per-frame range values, collected via a multi-month sampling strategy to provide the training material for long-range drone detectors.
If this is right
- Detection models can locate drones at greater distances using the 4K resolution than lower-resolution datasets allow.
- Paired thermal images enable detection under low-light or visually obscured conditions.
- Explicit range labels support distance-aware or scale-aware detection algorithms.
- The multi-month collection supports training of models that generalize across different environments and times of day.
- The dataset can serve as a benchmark for comparing new long-range UAV detection methods.
Where Pith is reading between the lines
- The range annotations could be used to train models that output both detection and estimated distance in a single forward pass.
- Combined RGB-IR pairs open the door to testing whether thermal data improves performance specifically when RGB contrast is low.
- The dataset size and pairing structure could support experiments on whether multi-modal training reduces false positives at long range compared to RGB-only training.
- Release of the full set at the provided link allows direct replication checks on whether the claimed diversity actually produces measurable gains in cross-day generalization.
Load-bearing premise
The sampling across 17 days and eight months supplies enough variation in lighting, locations, and backgrounds for models to generalize to unseen long-range drone sightings.
What would settle it
A detector trained only on LRDDv3 performs no better than chance on a new long-range test set recorded under lighting or background conditions absent from the original 17 collection days.
Figures

read the original abstract
Unmanned Aerial Vehicles (UAVs) have quickly become common in various airspaces, representing a wide range of applications from recreation flying to commercial photography and package delivery. With the increasing prevalence of UAVs, it becomes critical that both manned and unmanned aircraft can detect UAVs and other flying objects from long range to effectively track movement and ensure safe operation in shared spaces. While several datasets have been introduced for drone detection, the need for expanded high-quality data persists, especially in the area of high-resolution long-range drone data. To address this, we introduce a high-resolution dataset of 102,532 long-range RGB images of drones, sampled at 5 FPS from 128 distinct video clips taken mid flight during 17 different data collection days spread over 8 months to ensure a wide variety of lighting scenarios, flight locations, and background elements. The dataset boasts comprehensive drone range information across the dataset, as well as 29,630 IR images, all paired with RGB counterparts from the base dataset. As one of the first drone detection datasets to leverage 4K image resolution and paired 640x512 IR images, our work represents a significant advancement to enable the detection of drones at long range. For access to the complete dataset, please visit https://research.coe.drexel.edu/ece/imaple/lrddv3/
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces LRDDv3, a high-resolution long-range drone detection dataset containing 102,532 4K RGB frames sampled at 5 FPS from 128 video clips collected over 17 days spanning 8 months, together with 29,630 paired 640x512 IR images and range metadata for the drones.
Significance. If released as described, the dataset supplies a substantial new resource of high-resolution RGB imagery paired with thermal data and range information, addressing a documented gap in existing drone detection collections and supporting development of long-range detection systems.
Simulated Author's Rebuttal
We thank the referee for their thorough review and positive recommendation to accept the manuscript. We appreciate the recognition of LRDDv3 as a valuable resource addressing gaps in long-range drone detection datasets.
Circularity Check
No significant circularity; dataset release with no derivations
full rationale
The paper is a data release describing collection of 102532 4K RGB frames, 29630 paired IR frames, and range metadata across 128 clips over 17 days. No equations, models, predictions, or fitted parameters are present. The central claim is descriptive (dataset size, resolution, pairing, and collection protocol), with no load-bearing derivation that could reduce to self-definition or self-citation. Diversity of sampling is asserted as a collection fact, not derived from any fitted result.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Unmanned aerial vehicles (uavs): Practical aspects, applications, open challenges, security issues, and future trends,
S. A. H. Mohsan, N. Q. H. Othman, Y . Li, M. H. Alsharif, and M. A. Khan, “Unmanned aerial vehicles (uavs): Practical aspects, applications, open challenges, security issues, and future trends,” Intelligent service robotics, vol. 16, no. 1, pp. 109–137, 2023
2023
-
[2]
Optimizing uav location awareness telemetry data for low power wide area network,
T. Karachalios, C. Xouris, and T. Orphanoudakis, “Optimizing uav location awareness telemetry data for low power wide area network,” in2022 25th Euromicro Conference on Digital System Design (DSD), pp. 885–888, 2022
2022
-
[3]
Long-range drone detection dataset,
A. Rouhi, H. Umare, S. Patal, R. Kapoor, N. Deshpande, S. Are- zoomandan, P. Shah, and D. Han, “Long-range drone detection dataset,” in2024 IEEE International Conference on Consumer Elec- tronics (ICCE), pp. 1–6, 2024
2024
-
[4]
Lrddv2: Enhanced long-range drone detection dataset with range information and comprehensive real-world challenges,
A. Rouhi, S. Patel, N. McCarthy, S. Khan, H. Khorsand, K. Lefkowitz, and D. Han, “Lrddv2: Enhanced long-range drone detection dataset with range information and comprehensive real-world challenges,” in 2024 International Symposium of Robotics Research (ISRR), pp. 1–6, 2024
2024
-
[5]
Comparison of midwave versus longwave intensity signatures for infrared search and track of small rotorcraft unmanned aerial vehicles,
N. Fudala, R. Short, J. Hewitt, C. Halford, T. Pace, D. Manville, M. Theisen, C. Fearing, A. Dapore, C. Olson, G. Tener, D. Gaudiosi, K. Richardson, and R. Driggers, “Comparison of midwave versus longwave intensity signatures for infrared search and track of small rotorcraft unmanned aerial vehicles,”Optical Engineering, vol. 58, no. 4, p. 043107, 2019
2019
-
[6]
Investigation of uav de- tection in images with complex backgrounds and rainy artifacts,
A. Munir, A. J. Siddiqui, and S. Anwar, “Investigation of uav de- tection in images with complex backgrounds and rainy artifacts,” in Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision (WACV) Workshops, pp. 221–230, January 2024
2024
-
[7]
Visual signature reduction of unmanned aerial vehicles,
Z. W. Zhong, Z. X. Ma, Jayawijayaningtiyas, and J. H. H. Ngoh, “Visual signature reduction of unmanned aerial vehicles,” inTarget and Background Signatures II(K. U. Stein and R. H. M. A. Schleijpen, eds.), vol. 9997, p. 999707, International Society for Optics and Photonics, SPIE, 2016
2016
-
[8]
Vision- based uav detection in complex backgrounds and rainy conditions,
P. Singh, K. Gupta, A. K. Jain, Vishakha, A. Jain, and A. Jain, “Vision- based uav detection in complex backgrounds and rainy conditions,” in2024 2nd International Conference on Disruptive Technologies (ICDT), pp. 1097–1102, 2024
2024
-
[9]
Anti-occlusion uav tracking algorithm with a low-altitude complex background by integrating attention mechanism,
C. Wang, Z. Shi, L. Meng, J. Wang, T. Wang, Q. Gao, and E. Wang, “Anti-occlusion uav tracking algorithm with a low-altitude complex background by integrating attention mechanism,”Drones, vol. 6, no. 6, 2022
2022
-
[10]
Enhanced long-range uav detection: Leveraging slicing aided hyper inference with yolov8,
H. Khorsand, S. Arezoomandan, and D. K. Han, “Enhanced long-range uav detection: Leveraging slicing aided hyper inference with yolov8,” in2025 IEEE International Conference on Consumer Electronics (ICCE), pp. 1–6, 2025
2025
-
[11]
A dataset for multi-sensor drone detection,
F. Svanstr ¨om, F. Alonso-Fernandez, and C. Englund, “A dataset for multi-sensor drone detection,”Data in Brief, vol. 39, p. 107521, 2021
2021
-
[12]
Birdrone: A novel dataset for enhanced drone and bird detection using yolov9,
F. N. M. Zamri, T. S. Gunawan, S. H. Yusoff, Y . M. Mustafah, M. Kar- tiwi, and N. M. Yusoff, “Birdrone: A novel dataset for enhanced drone and bird detection using yolov9,” in2024 IEEE 10th International Conference on Smart Instrumentation, Measurement and Applications (ICSIMA), pp. 1–6, 2024
2024
-
[13]
Visiodect: a novel approach to drone detection using cbam-integrated yolo and gelan-e models,
S. B. Islam, M. E. Chowdhury, M. Hasan-Zia, S. B. A. Kashem, M. E. Majid, A. K. Ansaruddin Kunju, A. Khandakar, A. Ashraf, M. Nashbat,et al., “Visiodect: a novel approach to drone detection using cbam-integrated yolo and gelan-e models,”Neural Computing and Applications, pp. 1–24, 2025
2025
-
[14]
Real world object detection dataset for quadcopter unmanned aerial vehicle detection,
M. L. Pawelczyk and M. Wojtyra, “Real world object detection dataset for quadcopter unmanned aerial vehicle detection,”IEEE Access, vol. 8, pp. 174394–174409, 2020
2020
-
[15]
Syndronevi- sion: A synthetic dataset for image-based drone detection,
T. R. Lenhard, A. Weinmann, K. Franke, and T. Koch, “Syndronevi- sion: A synthetic dataset for image-based drone detection,” in2025 IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), pp. 7637–7647, 2025
2025
-
[16]
Vision-based anti-uav detec- tion and tracking,
J. Zhao, J. Zhang, D. Li, and D. Wang, “Vision-based anti-uav detec- tion and tracking,”IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 12, pp. 25323–25334, 2022
2022
-
[17]
Autonomous drone hunter operating by deep learning and all-onboard computations in gps-denied environments,
P. M. Wyder, Y .-S. Chen, A. J. Lasrado, R. J. Pelles, R. Kwiatkowski, E. O. A. Comas, R. Kennedy, A. Mangla, Z. Huang, X. Hu, Z. Xiong, T. Aharoni, T.-C. Chuang, and H. Lipson, “Autonomous drone hunter operating by deep learning and all-onboard computations in gps-denied environments,”PLOS ONE, vol. 14, pp. 1–18, 11 2019
2019
-
[18]
Fred: The florence rgb-event drone dataset,
G. Magrini, N. Marini, F. Becattini, L. Berlincioni, N. Biondi, P. Pala, and A. Del Bimbo, “Fred: The florence rgb-event drone dataset,”arXiv preprint arXiv:2506.05163, 2025
-
[19]
Global-local mav detection under challenging conditions based on appearance and motion,
H. Guo, Y . Zheng, Y . Zhang, Z. Gao, and S. Zhao, “Global-local mav detection under challenging conditions based on appearance and motion,”IEEE Transactions on Intelligent Transportation Systems, 2024
2024
-
[20]
Reconstruction of 3d flight trajectories from ad-hoc camera networks,
J. Li, J. Murray, D. Ismaili, K. Schindler, and C. Albl, “Reconstruction of 3d flight trajectories from ad-hoc camera networks,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 1621–1628, 2020
2020
-
[21]
uav detect dataset
GET, “uav detect dataset.”https://universe.roboflow.co m/get/uav-detect-pfiqs, jan 2023. visited on 2025-09-15
2023
-
[22]
Air-to-air visual detection of micro-uavs: An experimental evaluation of deep learning,
Y . Zheng, Z. Chen, D. Lv, Z. Li, Z. Lan, and S. Zhao, “Air-to-air visual detection of micro-uavs: An experimental evaluation of deep learning,” IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 1020–1027, 2021
2021
-
[23]
The drone-vs-bird detection grand challenge at icassp 2023: A review of methods and results,
A. Coluccia, A. Fascista, L. Sommer, A. Schumann, A. Dimou, and D. Zarpalas, “The drone-vs-bird detection grand challenge at icassp 2023: A review of methods and results,”IEEE Open Journal of Signal Processing, vol. 5, pp. 766–779, 2024
2023
-
[24]
Airborne Object Tracking Dataset,
Amazon, “Airborne Object Tracking Dataset,” July 2021
2021
-
[25]
A. A. Bakar, H. Mujtaba, M. S. Awan, K. Hasnain, and W. Mumtaz, “Amd3ir,” 2025
2025
-
[26]
Ev-flying: an event-based dataset for in-the-wild recognition of flying objects,
G. Magrini, F. Becattini, G. Colombo, and P. Pala, “Ev-flying: an event-based dataset for in-the-wild recognition of flying objects,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, pp. 4956–4964, June 2025
2025
-
[27]
Fast and robust uav to uav detection and tracking from video,
J. Li, D. H. Ye, M. Kolsch, J. P. Wachs, and C. A. Bouman, “Fast and robust uav to uav detection and tracking from video,” IEEE Transactions on Emerging Topics in Computing, vol. 10, no. 3, pp. 1519–1531, 2022
2022
-
[28]
MMFW-UA V Dataset,
Y . Liu, Z. Sun, L. Xi, L. Zhang, W. Dong, C. Chen, M. Lu, H. Fu, and F. Deng, “MMFW-UA V Dataset,” Nov. 2024
2024
-
[29]
Dac- sdc low power object detection challenge for uav applications,
X. Xu, X. Zhang, B. Yu, X. S. Hu, C. Rowen, J. Hu, and Y . Shi, “Dac- sdc low power object detection challenge for uav applications,”IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 43, no. 2, pp. 392–403, 2021
2021
-
[30]
Ugˆ 2: A video benchmark for assessing the impact of image restoration and enhancement on automatic visual recognition,
R. G. Vidal, S. Banerjee, K. Grm, V . Struc, and W. J. Scheirer, “Ugˆ 2: A video benchmark for assessing the impact of image restoration and enhancement on automatic visual recognition,” in2018 IEEE Winter Conference on Applications of Computer Vision (WACV), pp. 1597– 1606, IEEE, 2018
2018
-
[31]
Ultralytics yolo11,
G. Jocher and J. Qiu, “Ultralytics yolo11,” 2024
2024
-
[32]
Slicing aided hyper inference and fine-tuning for small object detection,
F. C. Akyon, S. Onur Altinuc, and A. Temizel, “Slicing aided hyper inference and fine-tuning for small object detection,” in2022 IEEE International Conference on Image Processing (ICIP), IEEE, Oct. 2022
2022
-
[33]
Labelimg
Tzutalin and HumanSignal, “Labelimg.”https://github.com /HumanSignal/labelImg, 2024. Version available at GitHub
2024
-
[34]
Hrformer: High-resolution transformer for dense predic- tion,
Y . Yuan, R. Fu, L. Huang, W. Lin, C. Zhang, X. Chen, and J. Wang, “Hrformer: High-resolution transformer for dense predic- tion,”NeurIPS, 2021
2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.