A contact version of Kirby's theorem
Pith reviewed 2026-06-29 14:30 UTC · model grok-4.3
The pith
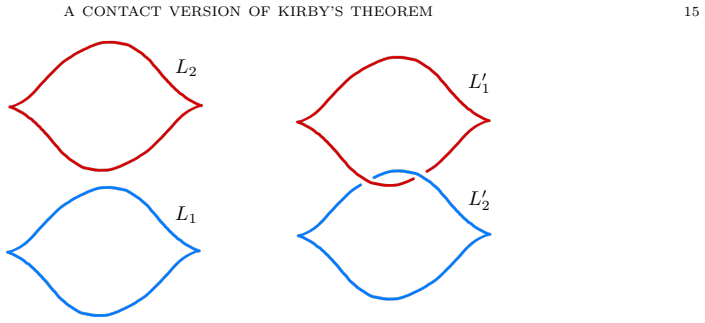
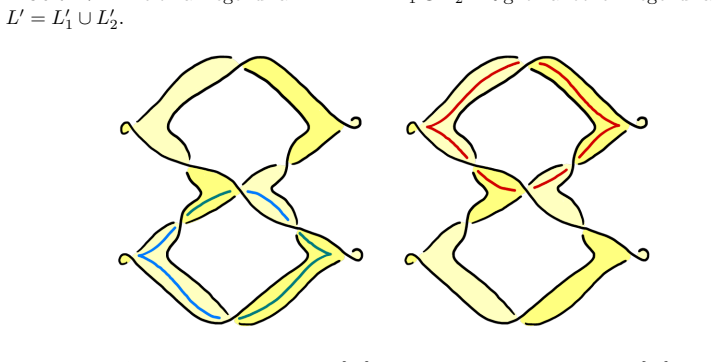
Two contact surgery diagrams represent contactomorphic 3-manifolds precisely when connected by planar isotopies, Legendrian Reidemeister moves, cancelling pairs, handle slides, lantern moves, and chain moves.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Two contact surgery diagrams represent contactomorphic contact manifolds if and only if they are related by a sequence of planar isotopies, Legendrian Reidemeister moves, insertions or removals of standard cancelling pairs, the two standard contact handle slides, the standard lantern move, and the standard chain move. All these moves are explicit diagrammatic operations in the front projection.
What carries the argument
The standard lantern move and standard chain move, which complete the set of contact Kirby moves when combined with isotopies, Reidemeister moves, cancelling pairs, and handle slides via the ribbon-move framework.
If this is right
- Gompf's d3-invariant is unchanged by each of the eight moves and can be recovered directly from the diagram without reference to the manifold.
- The classical topological Kirby theorem follows as a corollary obtained by forgetting the contact structure.
- Any two contact surgery diagrams of the same manifold can be transformed into each other using only these front-projection operations.
- The moves give a practical method for comparing contact structures by reducing one diagram to the other.
Where Pith is reading between the lines
- The calculus could be applied to decide contactomorphism by attempting to reduce both diagrams to a common normal form.
- Similar diagrammatic presentations might be sought for contact structures in higher dimensions or for other geometric structures on 3-manifolds.
- Contact-geometric techniques may yield new proofs of purely topological results beyond the Kirby theorem.
Load-bearing premise
Avdek's ribbon-move framework together with Gervais' presentation of the mapping class group generates all equivalences that arise from contactomorphisms of the surgered manifolds.
What would settle it
Two diagrams of contactomorphic manifolds whose front projections cannot be connected by any finite sequence of the eight listed moves.
Figures



















































read the original abstract
A theorem of Ding and Geiges states that every closed, connected contact $3$-manifold can be obtained from the standard tight contact $3$-sphere by contact $(\pm1)$-surgery along a Legendrian link. The literature also contains some examples of contact Kirby moves, i.e. explicit operations on front projections of Legendrian surgery links that change the surgery link but preserve the contactomorphism type of the surgered manifold. Among the most commonly used are cancelling pairs and contact handle slides; however, these moves alone are not sufficient to relate all contact surgery diagrams of contactomorphic contact manifolds. In this article, we introduce two new families of contact Kirby moves, called lantern moves and chain moves, and use them to give a complete set of contact Kirby moves. More precisely, we show that two contact surgery diagrams represent contactomorphic contact manifolds if and only if they are related by a sequence of planar isotopies, Legendrian Reidemeister moves, insertions or removals of standard cancelling pairs, the two standard contact handle slides, the standard lantern move, and the standard chain move. All these moves are explicit diagrammatic operations in the front projection. The proof follows an approach initiated by Avdek through his ribbon-move framework, which is rooted in the Giroux correspondence, and combines it with a presentation by Gervais of the mapping class group. We also discuss several consequences of the main theorem, illustrating the effectiveness of the contact Kirby calculus by recovering the invariance of Gompf's $d_3$-invariant purely diagrammatically and by deriving the topological Kirby theorem from contact-geometric methods.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to establish a complete contact-geometric analogue of Kirby's theorem: two contact surgery diagrams on Legendrian links in the standard tight contact 3-sphere represent contactomorphic contact 3-manifolds if and only if they are related by planar isotopies, Legendrian Reidemeister moves, insertions or removals of standard cancelling pairs, the two standard contact handle slides, the standard lantern move, and the standard chain move. All moves are explicit in the front projection. The proof combines Avdek's ribbon-move framework (via the Giroux correspondence) with Gervais' finite presentation of the mapping class group; consequences include a purely diagrammatic proof of the invariance of Gompf's d_3-invariant and a contact-geometric derivation of the classical topological Kirby theorem.
Significance. If the central claim holds, the result supplies a practical, fully explicit diagrammatic calculus for contact surgery, a foundational operation in contact topology. The explicit front-projection moves and the recovery of d_3-invariance directly from the moves constitute concrete strengths; likewise, deriving the topological Kirby theorem from contact-geometric methods illustrates the framework's reach. The work builds on existing tools (Avdek, Gervais, Giroux) to produce a usable move set rather than an existence result.
major comments (2)
- [Proof of the main theorem] Main theorem (proof section combining Avdek ribbon moves with Gervais MCG presentation): the completeness of the listed move set rests on the assertion that the lantern move, chain move, and classical operations realize every generator and relation in Gervais' presentation when transported through Avdek's framework. The manuscript does not supply an explicit enumeration, table, or case-by-case verification showing how each MCG generator is realized by a finite sequence of the front-projection moves; without this check the iff direction remains unverified and load-bearing for the central claim.
- [Consequences] Consequences section (diagrammatic invariance of d_3): the claim that d_3 is invariant under the full move set is asserted, but the argument should explicitly track the effect of each new move (lantern and chain) on the d_3 formula rather than appealing only to the abstract equivalence; this step is needed to make the diagrammatic recovery self-contained.
minor comments (2)
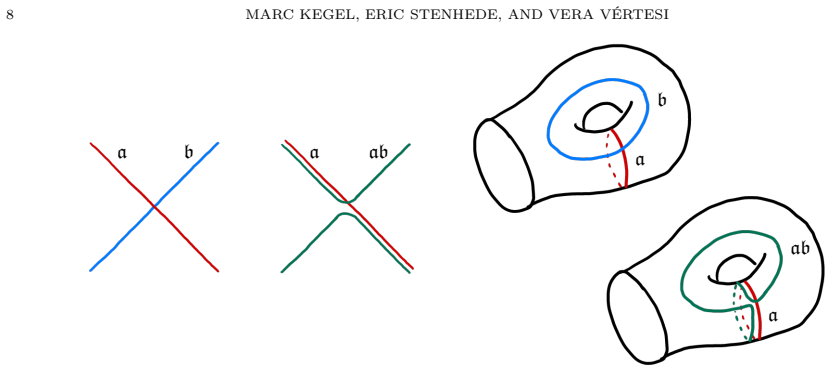
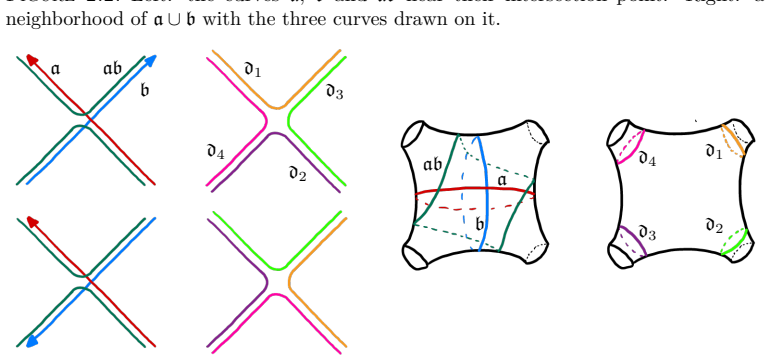
- [Introduction] The abstract and introduction refer to 'the standard lantern move' and 'the standard chain move' without an immediate figure or coordinate description; adding a short defining diagram or local front-projection picture at first mention would improve readability.
- Notation for the two new moves could be introduced with a consistent label (e.g., L for lantern, C for chain) and cross-referenced in the statement of the main theorem.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments on our manuscript. The suggestions will improve the clarity and completeness of the presentation. We address each major comment below and will incorporate the necessary revisions.
read point-by-point responses
-
Referee: [Proof of the main theorem] Main theorem (proof section combining Avdek ribbon moves with Gervais MCG presentation): the completeness of the listed move set rests on the assertion that the lantern move, chain move, and classical operations realize every generator and relation in Gervais' presentation when transported through Avdek's framework. The manuscript does not supply an explicit enumeration, table, or case-by-case verification showing how each MCG generator is realized by a finite sequence of the front-projection moves; without this check the iff direction remains unverified and load-bearing for the central claim.
Authors: We agree that an explicit case-by-case verification would make the argument more transparent and self-contained. In the revised manuscript we will add a dedicated subsection (or appendix table) that enumerates each generator and relation from Gervais' presentation, indicates the corresponding sequence of Avdek ribbon moves, and shows how those ribbon moves are realized by the listed front-projection operations (planar isotopies, Legendrian Reidemeister moves, cancelling pairs, handle slides, lantern moves, and chain moves). This addition will directly verify the completeness claim without altering the logical structure of the proof. revision: yes
-
Referee: [Consequences] Consequences section (diagrammatic invariance of d_3): the claim that d_3 is invariant under the full move set is asserted, but the argument should explicitly track the effect of each new move (lantern and chain) on the d_3 formula rather than appealing only to the abstract equivalence; this step is needed to make the diagrammatic recovery self-contained.
Authors: We will revise the consequences section to include explicit computations of the change in the d_3 invariant under both the lantern move and the chain move. These calculations will be performed directly from the front-projection diagrams and the standard d_3 formula, thereby providing a fully diagrammatic verification of invariance under the complete move set rather than relying solely on the abstract contactomorphism. revision: yes
Circularity Check
No circularity: completeness proof combines external Avdek ribbon framework and Gervais MCG presentation with newly introduced explicit moves
full rationale
The paper's if-and-only-if theorem on contact surgery diagrams is established by defining two new families of moves (lantern and chain) and showing they complete the set when combined with standard operations. The derivation explicitly invokes Avdek's prior ribbon-move framework (rooted in the Giroux correspondence) and Gervais' independent presentation of the mapping class group; neither is a self-citation by the present authors, nor does any step reduce a claimed result to a quantity defined in terms of itself or to a fitted parameter inside this paper. The central claim therefore rests on external, independently verifiable frameworks plus the paper's own diagrammatic definitions, with no load-bearing reduction by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Giroux correspondence between contact structures and open book decompositions
- domain assumption Gervais' presentation of the mapping class group
Reference graph
Works this paper leans on
-
[1]
Contact surgery and supporting open books
[Avd13] R. Avdek: “Contact surgery and supporting open books”.Algebr. Geom. Topol.13.3 (2013), 1613–1660. [Avd23] R. Avdek: “Combinatorial Reeb dynamics on punctured contact 3-manifolds”.Geom. Topol. 27.3 (2023), 953–1082. [BBP+] B. Burton, R. Budney, W. Pettersson, et al.:Regina: Software for low-dimensional topology. Available online athttp://regina-nor...
2013
-
[2]
Legendrian graphs and quasipositive diagrams
arXiv:2307.02317 [math.SG]. [BI09] S. Baader and M. Ishikawa: “Legendrian graphs and quasipositive diagrams”.Ann. Fac. Sci. Toulouse Math. (6)18.2 (2009), 285–305. [CEK24] R. Casals, J. Etnyre, and M. Kegel: “Stein traces and characterizing slopes”.Math. Ann.389.2 (2024), 1053–1098. [Che02] Y. Chekanov: “Differential algebra of Legendrian links”.Invent. M...
-
[3]
Fibered transverse knots and the Bennequin bound
Clay Math. Proc. Providence, RI: Amer. Math. Soc., 2006, 103–141. [EV11] J. B. Etnyre and J. Van Horn-Morris: “Fibered transverse knots and the Bennequin bound”. Int. Math. Res. Not. IMRN7 (2011), 1483–1509. [FM12] B. Farb and D. Margalit:A primer on mapping class groups. Vol
2006
-
[4]
Explicit concave fillings of contact three-manifolds
[Gay02] D. T. Gay: “Explicit concave fillings of contact three-manifolds”.Math. Proc. Cambridge Philos. Soc.133.3 (2002), 431–441. [Gei08] H. Geiges:An introduction to contact topology. Vol
2002
-
[5]
Presentation and central extensions of mapping class groups
[Ger96] S. Gervais: “Presentation and central extensions of mapping class groups”.Trans. Amer. Math. Soc.348.8 (1996), 3097–3132. [Ghi08] P. Ghiggini: “On tight contact structures with negative maximal twisting number on small Seifert manifolds”.Algebr. Geom. Topol.8.1 (2008), 381–396. [Gir02] E. Giroux: “Géométrie de contact: de la dimension trois vers l...
1996
-
[6]
On the classification of tight contact structures. I
[Hon00] K. Honda: “On the classification of tight contact structures. I”.Geom. Topol.4 (2000), 309–368. [Hut14] M. Hutchings: “Lecture notes on embedded contact homology”.Contact and symplectic topology. Vol
2000
-
[7]
On the Thurston–Bennequin invariant of Legendrian knots and non-exactness of Bennequin’s inequality
Bolyai Soc. Math. Stud. Budapest: János Bolyai Math. Soc., 2014, 389–484. [Kan98] Y. Kanda: “On the Thurston–Bennequin invariant of Legendrian knots and non-exactness of Bennequin’s inequality”.Invent. Math.133.2 (1998), 227–242. [Keg17] M. Kegel: “Legendrian knots in surgery diagrams and the knot complement problem”. PhD thesis. Universität zu Köln,
2014
-
[8]
The Legendrian knot complement problem
[Keg18] M. Kegel: “The Legendrian knot complement problem”.J. Knot Theory Ramifications27.14 (2018), 1850067,
2018
-
[9]
A calculus for framed links inS3
[Kir78] R. Kirby: “A calculus for framed links inS3”.Invent. Math.45.1 (1978), 35–56. [KO23] M. Kegel and S. Onaran: “Contact surgery graphs”.Bull. Aust. Math. Soc.107.1 (2023), 146–157. [Lic62] W. B. R. Lickorish: “A representation of orientable combinatorial3-manifolds”.Ann. of Math. (2)76 (1962), 531–540. [Lic64] W. B. R. Lickorish: “A finite set of ge...
1978
-
[10]
A simple proof of the fundamental theorem of Kirby calculus on links
arXiv:2408.01079 [math.GT]. [Lu92] N. Lu: “A simple proof of the fundamental theorem of Kirby calculus on links”.Trans. Amer. Math. Soc.331.1 (1992), 143–156. [LV24] J. Licata and V. Vértesi:Heegaard splittings and the tight Giroux correspondence
-
[11]
A geometrical presentation of the surface mapping class group and surgery
arXiv: 2309.11828 [math.GT]. [MP94] S. Matveev and M. Polyak: “A geometrical presentation of the surface mapping class group and surgery”.Comm. Math. Phys.160.3 (1994), 537–550. [OS04] B. Ozbagci and A. I. Stipsicz:Surgery on contact 3-manifolds and Stein surfaces. Vol
-
[12]
Heegaard Floer homology and contact structures
[OS05] P. Ozsváth and Z. Szabó: “Heegaard Floer homology and contact structures”.Duke Math. J. 129.1 (2005), 39–61. [Pla07] O. Plamenevskaya: “A combinatorial description of the Heegaard Floer contact invariant”. Algebr. Geom. Topol.7 (2007), 1201–1209. [Ste26] E. Stenhede:An algorithm to Legendrian realize a curve on a ribbon surface
2005
-
[13]
An algorithm to Legendrian realize a curve on a ribbon surface
arXiv: 2604.08010 [math.GT]. [Swi92] J. Swiatkowski: “On the isotopy of Legendrian knots”.Ann. Global Anal. Geom.10.3 (1992), 195–207. [Vit99] C. Viterbo: “Functors and computations in Floer homology with applications. I”.Geom. Funct. Anal.9.5 (1999), 985–1033. [Wal60] A. H. Wallace: “Modifications and cobounding manifolds”.Canadian J. Math.12 (1960), 503...
work page internal anchor Pith review Pith/arXiv arXiv 1992
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.