Simultaneous Contact Selection and Planning for Contact-Rich Manipulation with Cascaded Optimization
Pith reviewed 2026-06-29 12:25 UTC · model grok-4.3
The pith
SCSP uses cascaded optimization to jointly select contact locations and generate manipulation trajectories for robots.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
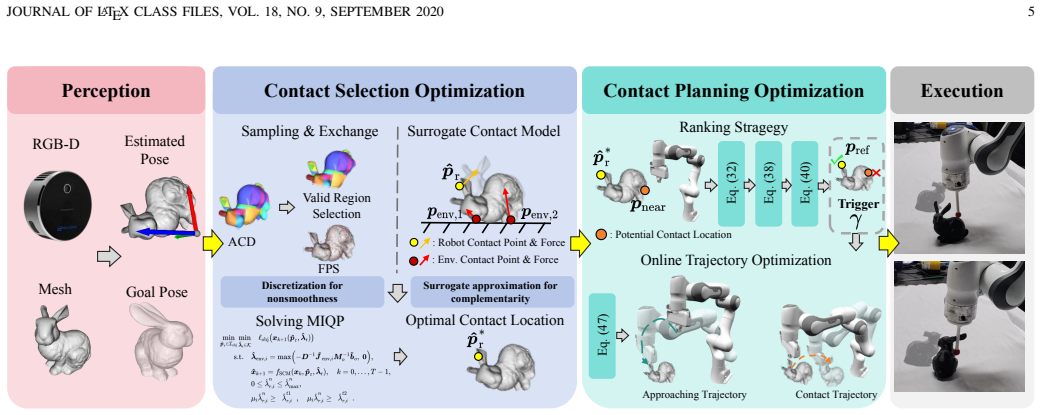
SCSP is a cascaded optimization framework with Contact Selection Optimization that employs a surrogate contact model and discrete-continuous optimization to enable online global search over contact locations, followed by Contact Planning Optimization that evaluates those locations and produces real-time manipulation trajectories for redundant manipulators.
What carries the argument
Cascaded optimization consisting of CSO (surrogate contact model plus discrete-continuous optimization for contact selection) and CPO (prior-guided trajectory generation).
If this is right
- The framework produces diverse manipulation behaviors without requiring hand-specified contact sequences.
- It delivers robust closed-loop control when dynamics are inaccurate or perception contains noise.
- The method generalizes to challenging manipulation tasks beyond simple pick-and-place.
- Contact selection and trajectory planning can run online for redundant manipulators.
Where Pith is reading between the lines
- The separation into selection and planning stages may allow reuse of the CSO module with different planners or robot morphologies.
- The surrogate model could be updated online from real data to further reduce sensitivity to initial modeling errors.
- Similar cascaded structures might apply to other hybrid systems with mode selection, such as legged locomotion or multi-arm coordination.
Load-bearing premise
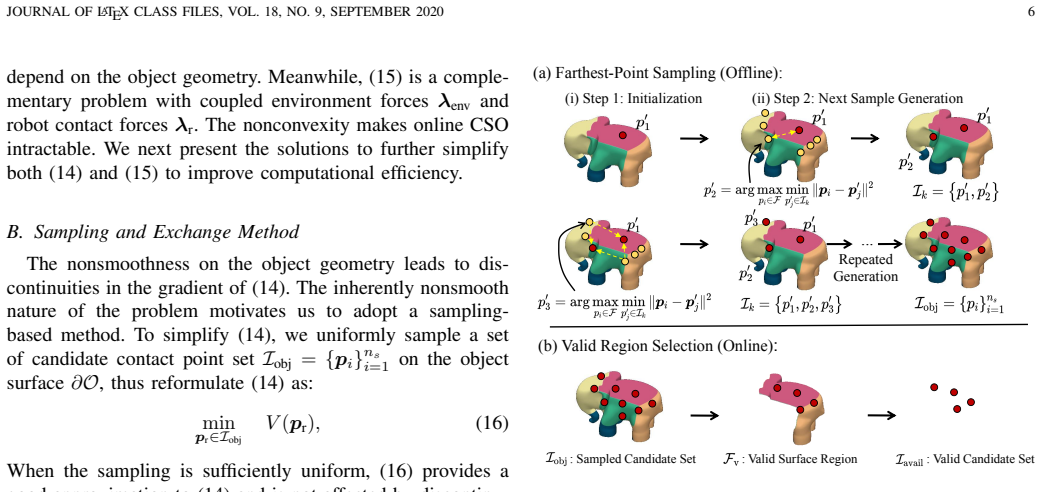
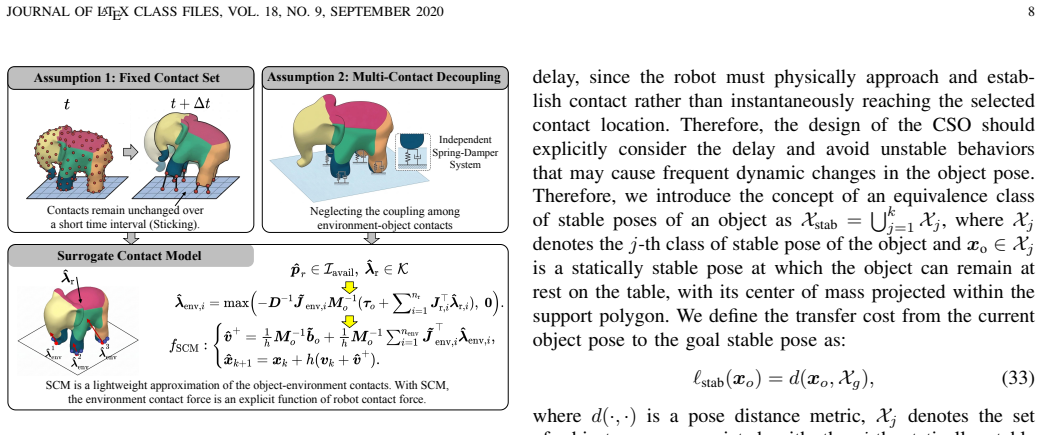
The surrogate contact model combined with discrete-continuous optimization can efficiently resolve the nonsmoothness and coupling in contact selection to enable online global searching of optimal contact locations.
What would settle it
A manipulation task in which the surrogate model produces contact locations that lead to unstable or infeasible trajectories under the true contact dynamics, or where the method cannot find any valid contacts within the allotted time.
Figures











read the original abstract
We propose an optimization-based framework for robust contact-rich manipulation. Recent contact-implicit methods enable online hybrid planning across contact modes, allowing closed-loop manipulation for a given target state and contact location sequence of the robot and object. However, most existing approaches lack the ability to autonomously reason and generate diverse contact location sequences and manipulation trajectories, i.e., active contact location selection, which limits their applicability to relatively simple tasks. Active contact location selection is challenging due to complementarity in contact dynamics and the sparse gradients, making the design of a unified framework for contact selection and planning difficult. To address these challenges, we introduce Simultaneous Contact Selection and Planning (SCSP), a cascaded optimization framework comprising Contact Selection Optimization (CSO) and Contact Planning Optimization (CPO). CSO leverages a surrogate contact model and discrete-continuous optimization to efficiently resolve the nonsmoothness and coupling in contact selection, enabling online global searching of optimal contact locations. CPO performs prior-guided contact planning by evaluating the reference contact locations produced by CSO and generating corresponding manipulation trajectories in real time for redundant manipulators. Extensive simulations and real-world experiments demonstrate that SCSP produces diverse manipulation behaviors and robust control under inaccurate dynamics and perceptual noise. We further validate the generalization of the framework on challenging manipulation tasks. Project website: \href{https://sites.google.com/view/scsp-robot}{https://sites.google.com/view/scsp-robot}.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Simultaneous Contact Selection and Planning (SCSP), a cascaded optimization framework with Contact Selection Optimization (CSO) and Contact Planning Optimization (CPO). CSO employs a surrogate contact model and discrete-continuous optimization to resolve nonsmoothness and complementarity issues for online global search of contact locations; CPO then performs prior-guided trajectory generation for redundant manipulators. The central claim is that this enables diverse manipulation behaviors and robust closed-loop control under inaccurate dynamics and perceptual noise, with generalization validated on challenging tasks via simulations and real-world experiments.
Significance. If the results hold, the work meaningfully extends contact-implicit planning by adding autonomous contact-location selection, addressing a noted limitation in prior methods that fix contact sequences. Explicit algorithmic steps, pseudocode, and multi-task experimental validation (including robustness tests) are strengths that support reproducibility and practical applicability for contact-rich manipulation.
minor comments (3)
- [§3.2] §3.2, surrogate contact model definition: the transition from the complementarity conditions to the surrogate formulation would benefit from an explicit equation showing how the relaxation parameter is chosen or scheduled, to clarify the approximation error bound.
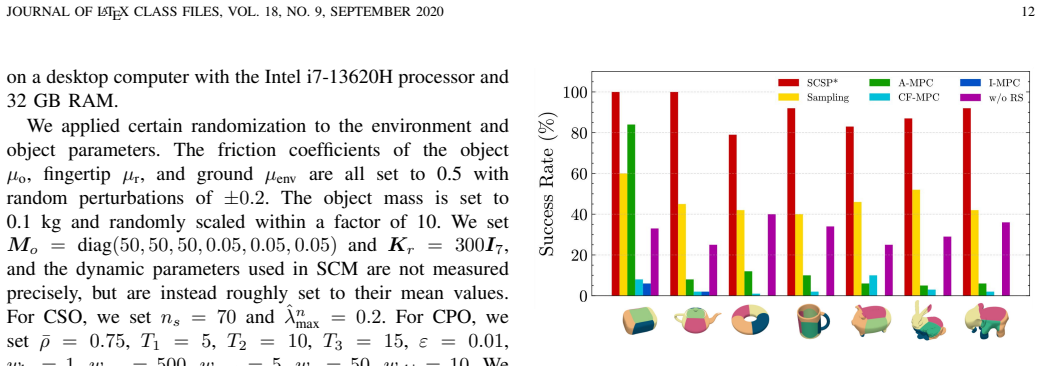
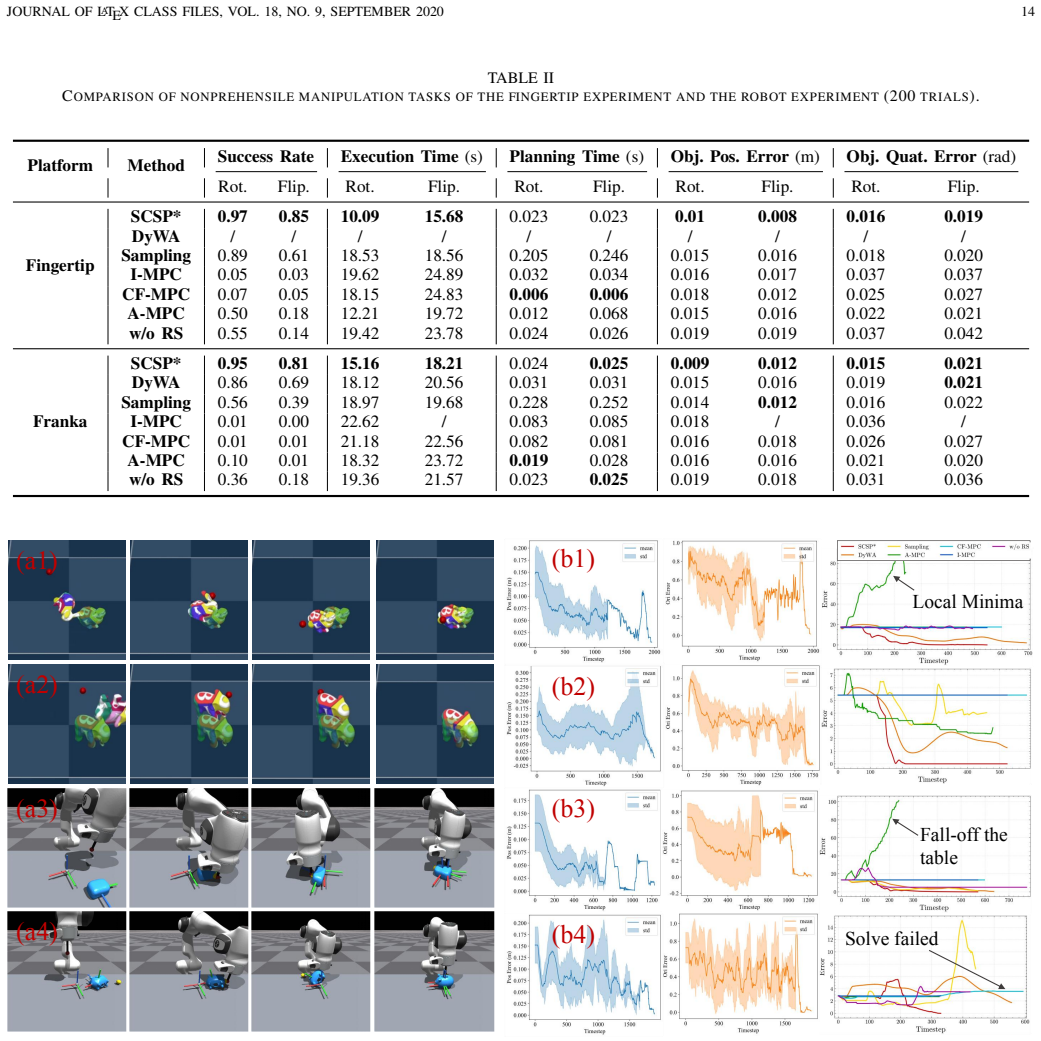
- [Figure 4, §5.1] Figure 4 caption and §5.1: the reported success rates lack error bars or trial counts; adding these would strengthen the robustness claims under noise.
- The reference list omits a citation to the specific prior contact-implicit baseline used for comparison in the experiments; this should be added for completeness.
Simulated Author's Rebuttal
We thank the referee for their positive assessment of the manuscript, recognition of its contributions to contact-implicit planning, and recommendation for minor revision. The feedback on algorithmic clarity, pseudocode, and multi-task validation is appreciated.
Circularity Check
No significant circularity detected
full rationale
The paper introduces SCSP as a cascaded CSO+CPO optimization framework that defines a surrogate contact model and discrete-continuous solver explicitly in the text, with algorithmic pseudocode and experimental validation on multiple tasks. No equation or claim reduces by construction to a fitted parameter renamed as prediction, a self-citation chain, or an ansatz imported without independent justification; the central construction is presented as a new algorithmic assembly motivated by prior contact-implicit literature but not dependent on it for its core definitions or claimed robustness.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Two-level RRT planning for robotic push manipulation,
C. Zito, R. Stolkin, M. Kopicki, and J. L. Wyatt, “Two-level RRT planning for robotic push manipulation,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2012, pp. 678–685
2012
-
[2]
R3T: Rapidly-exploring random reachable set tree for optimal kinodynamic planning of nonlinear hybrid systems,
A. Wu, S. Sadraddini, and R. Tedrake, “R3T: Rapidly-exploring random reachable set tree for optimal kinodynamic planning of nonlinear hybrid systems,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), 2020, pp. 4245–4251
2020
-
[3]
Kinodynamic randomized rearrangement planning via dynamic transitions between statically stable states,
J. A. Haustein, J. King, S. S. Srinivasa, and T. Asfour, “Kinodynamic randomized rearrangement planning via dynamic transitions between statically stable states,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), 2015, pp. 3075–3082
2015
-
[4]
Tra- jectotree: Trajectory optimization meets tree search for planning multi- contact dexterous manipulation,
C. Chen, P. Culbertson, M. Lepert, M. Schwager, and J. Bohg, “Tra- jectotree: Trajectory optimization meets tree search for planning multi- contact dexterous manipulation,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2021, pp. 8262–8268
2021
-
[5]
Contact mode guided motion planning for quasidynamic dexterous manipulation in 3D,
X. Cheng, E. Huang, Y . Hou, and M. T. Mason, “Contact mode guided motion planning for quasidynamic dexterous manipulation in 3D,” in Proc. IEEE Int. Conf. Robot. Autom. (ICRA), 2022, pp. 2730–2736
2022
-
[6]
A global quasi-dynamic model for contact-trajectory optimization in manipulation,
B. Aceituno-Cabezas and A. Rodriguez, “A global quasi-dynamic model for contact-trajectory optimization in manipulation,” 2020
2020
-
[7]
Approximate hybrid model predictive control for multi-contact push recovery in complex environments,
T. Marcucci, R. Deits, M. Gabiccini, A. Bicchi, and R. Tedrake, “Approximate hybrid model predictive control for multi-contact push recovery in complex environments,” inProc. IEEE-RAS Int. Conf. Humanoid Robots (Humanoids), 2017, pp. 31–38
2017
-
[8]
Feedback control of the pusher-slider system: A story of hybrid and underactuated contact dynamics,
F. R. Hogan and A. Rodriguez, “Feedback control of the pusher-slider system: A story of hybrid and underactuated contact dynamics,” in Algorithmic F oundations of Robotics XII, 2020, pp. 800–815
2020
-
[9]
Pre- and post-contact policy decomposition for non-prehensile manipulation with zero-shot sim-to- real transfer,
M. Kim, J. Han, J. Kim, and B. Kim, “Pre- and post-contact policy decomposition for non-prehensile manipulation with zero-shot sim-to- real transfer,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2023, pp. 10 644–10 651
2023
-
[10]
Learning preconditions of hybrid force-velocity controllers for contact-rich manipulation,
J. Liang, X. Cheng, and O. Kroemer, “Learning preconditions of hybrid force-velocity controllers for contact-rich manipulation,” inProc. Conf. Robot Learn. (CoRL)
-
[11]
Learning to grasp the ungraspable with emergent extrinsic dexterity,
W. Zhou and D. Held, “Learning to grasp the ungraspable with emergent extrinsic dexterity,” inProc. Conf. Robot Learn. (CoRL), 2023, pp. 150– 160
2023
-
[12]
Learning generalizable pivoting skills,
X. Zhang, S. Jain, B. Huang, M. Tomizuka, and D. Romeres, “Learning generalizable pivoting skills,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), 2023, pp. 5865–5871
2023
-
[13]
HACMan: Learning hybrid actor-critic maps for 6D non-prehensile manipulation,
W. Zhou, B. Jiang, F. Yang, C. Paxton, and D. Held, “HACMan: Learning hybrid actor-critic maps for 6D non-prehensile manipulation,” inProc. Conf. Robot Learn. (CoRL), 2023, pp. 241–265
2023
-
[14]
Y . Cho, J. Han, Y . Cho, and B. Kim, “Corn: Contact-based object rep- resentation for nonprehensile manipulation of general unseen objects,” arXiv preprint arXiv:2403.10760, 2024
-
[15]
Hacman++: Spatially-grounded motion primitives for manipulation,
B. Jiang, Y . Wu, W. Zhou, C. Paxton, and D. Held, “Hacman++: Spatially-grounded motion primitives for manipulation,”arXiv preprint arXiv:2407.08585, 2024
-
[16]
Enhancing exploration with diffusion policies in hybrid off-policy RL: Application to non-prehensile manipulation,
H. Le, T. Hoang, M. Gabriel, G. Neumann, and N. A. Vien, “Enhancing exploration with diffusion policies in hybrid off-policy RL: Application to non-prehensile manipulation,”IEEE Robot. Autom. Lett., 2025
2025
-
[17]
Dywa: Dynamics- adaptive world action model for generalizable non-prehensile manipu- lation,
J. Lyu, Z. Li, X. Shi, C. Xu, Y . Wang, and H. Wang, “Dywa: Dynamics- adaptive world action model for generalizable non-prehensile manipu- lation,” inProc. IEEE/CVF Int. Conf. Comput. Vis. (ICCV), 2025, pp. 11 058–11 068
2025
-
[18]
A direct method for trajectory optimization of rigid bodies through contact,
M. Posa, C. Cantu, and R. Tedrake, “A direct method for trajectory optimization of rigid bodies through contact,”Int. J. Robot. Res., vol. 33, no. 1, pp. 69–81, 2014
2014
-
[19]
Optimization-based control for dynamic legged robots,
P. M. Wensing, M. Posa, Y . Hu, A. Escande, N. Mansard, and A. Del Prete, “Optimization-based control for dynamic legged robots,” IEEE Trans. Robot., vol. 40, pp. 43–63, 2023
2023
-
[20]
On the surprising robustness of sequential convex optimization for contact-implicit motion planning,
Y . Li, H. Han, S. Kang, J. Ma, and H. Yang, “On the surprising robustness of sequential convex optimization for contact-implicit motion planning,”arXiv preprint arXiv:2502.01055, 2025
-
[21]
An implicit time-stepping scheme for rigid body dynamics with Coulomb friction,
D. Stewart and J. C. Trinkle, “An implicit time-stepping scheme for rigid body dynamics with Coulomb friction,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), vol. 1, 2000, pp. 162–169
2000
-
[22]
Optimization-based simulation of nonsmooth rigid multi- body dynamics,
M. Anitescu, “Optimization-based simulation of nonsmooth rigid multi- body dynamics,”Math. Program., vol. 105, no. 1, pp. 113–143, 2006
2006
-
[23]
Consensus comple- mentarity control for multi-contact MPC,
A. Aydinoglu, A. Wei, W.-C. Huang, and M. Posa, “Consensus comple- mentarity control for multi-contact MPC,”IEEE Trans. Robot., 2024
2024
-
[24]
Global planning for contact-rich manipulation via local smoothing of quasi-dynamic contact models,
T. Pang, H. J. T. Suh, L. Yang, and R. Tedrake, “Global planning for contact-rich manipulation via local smoothing of quasi-dynamic contact models,”IEEE Trans. Robot., vol. 39, no. 6, pp. 4691–4711, 2023
2023
-
[25]
Dexterous contact-rich ma- nipulation via the contact trust region,
H. Suh, T. Pang, T. Zhao, and R. Tedrake, “Dexterous contact-rich ma- nipulation via the contact trust region,”arXiv preprint arXiv:2505.02291, 2025
-
[26]
Y . Jiang, M. Yu, X. Zhu, M. Tomizuka, and X. Li, “Robust model-based in-hand manipulation with integrated real-time motion-contact planning and tracking,”arXiv preprint arXiv:2505.04978, 2025
-
[27]
Complementarity-free multi-contact modeling and optimization for dexterous manipulation,
W. Jin, “Complementarity-free multi-contact modeling and optimization for dexterous manipulation,”arXiv preprint arXiv:2408.07855, 2024
-
[28]
Inverse dynamics trajectory optimization for contact-implicit model predictive control,
V . Kurtz, A. Castro, A. ¨O. ¨Onol, and H. Lin, “Inverse dynamics trajectory optimization for contact-implicit model predictive control,”Int. J. Robot. Res., vol. 45, no. 1, pp. 23–40, 2026
2026
-
[29]
Simultaneous trajectory optimization and contact selection for contact-rich manipula- tion with high-fidelity geometry,
M. Zhang, D. K. Jha, A. U. Raghunathan, and K. Hauser, “Simultaneous trajectory optimization and contact selection for contact-rich manipula- tion with high-fidelity geometry,”IEEE Trans. Robot., 2025. JOURNAL OF LATEX CLASS FILES, VOL. 18, NO. 9, SEPTEMBER 2020 20
2025
-
[30]
Approximating Global Contact-Implicit MPC via Sampling and Local Complementarity
S. Venkatesh, B. Bianchini, A. Aydinoglu, W. Yang, and M. Posa, “Approximating global contact-implicit MPC via sampling and local complementarity,”arXiv preprint arXiv:2505.13350, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[31]
H. Bui, Y . Gao, H. Yang, E. Cui, S. Mody, B. Acosta, T. S. Felix, B. Bianchini, and M. Posa, “Push anything: Single- and multi-object pushing from first sight with contact-implicit MPC,”arXiv preprint arXiv:2510.19974, 2025
-
[32]
Spider: Scalable physics-informed dexterous retargeting,
C. Pan, C. Wang, H. Qi, Z. Liu, H. Bharadhwaj, A. Sharma, T. Wu, G. Shi, J. Malik, and F. Hogan, “Spider: Scalable physics-informed dexterous retargeting,”arXiv preprint arXiv:2511.09484, 2025
-
[33]
Z. Xie, Y . Xiang, M. Posa, and W. Jin, “Where to touch, how to con- tact: Hierarchical RL-MPC framework for geometry-aware long-horizon dexterous manipulation,”arXiv preprint arXiv:2601.10930, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[34]
A convex quasistatic time-stepping scheme for rigid multibody systems with contact and friction,
T. Pang and R. Tedrake, “A convex quasistatic time-stepping scheme for rigid multibody systems with contact and friction,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), 2021, pp. 6614–6620
2021
-
[35]
Impedance control: An approach to manipulation,
N. Hogan, “Impedance control: An approach to manipulation,” inProc. Amer . Control Conf. (ACC), 1984, pp. 304–313
1984
-
[36]
An iterative approach for cone comple- mentarity problems for nonsmooth dynamics,
M. Anitescu and A. Tasora, “An iterative approach for cone comple- mentarity problems for nonsmooth dynamics,”Comput. Optim. Appl., vol. 47, no. 2, pp. 207–235, 2010
2010
-
[37]
Avriel,Nonlinear programming: Analysis and methods
M. Avriel,Nonlinear programming: Analysis and methods. Courier Corporation, 2003
2003
-
[38]
Approximate convex decomposition of polyhedra,
J.-M. Lien and N. M. Amato, “Approximate convex decomposition of polyhedra,” inProc. ACM Symp. Solid Phys. Model., 2007, pp. 121–131
2007
-
[39]
Perceptive mixed-integer footstep control for underactuated bipedal walking on rough terrain,
B. Acosta and M. Posa, “Perceptive mixed-integer footstep control for underactuated bipedal walking on rough terrain,”IEEE Trans. Robot., 2025
2025
-
[40]
Operational space control: A theoretical and empirical comparison,
J. Nakanishi, R. Cory, M. Mistry, J. Peters, and S. Schaal, “Operational space control: A theoretical and empirical comparison,”Int. J. Robot. Res., vol. 27, no. 6, pp. 737–757, 2008
2008
-
[41]
Model Predictive Path Integral Control using Covariance Variable Importance Sampling
G. Williams, A. Aldrich, and E. Theodorou, “Model predictive path integral control using covariance variable importance sampling,”arXiv preprint arXiv:1509.01149, 2015
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[42]
Contactdb: An- alyzing and predicting grasp contact via thermal imaging,
S. Brahmbhatt, C. Ham, C. C. Kemp, and J. Hays, “Contactdb: An- alyzing and predicting grasp contact via thermal imaging,” inProc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit. (CVPR), 2019, pp. 8709–8719
2019
-
[43]
MuJoCo: A physics engine for model-based control,
E. Todorov, T. Erez, and Y . Tassa, “MuJoCo: A physics engine for model-based control,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), 2012, pp. 5026–5033
2012
-
[44]
Isaac Gym: High Performance GPU-Based Physics Simulation For Robot Learning
V . Makoviychuk, L. Wawrzyniak, Y . Guo, M. Lu, K. Storey, M. Macklin, D. Hoeller, N. Rudin, A. Allshire, A. Handa, and G. State, “Isaac Gym: High performance GPU-based physics simulation for robot learning,” arXiv preprint arXiv:2108.10470, 2021
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[45]
Approximate convex decomposition for 3D meshes with collision-aware concavity and tree search,
X. Wei, M. Liu, Z. Ling, and H. Su, “Approximate convex decomposition for 3D meshes with collision-aware concavity and tree search,”ACM Trans. Graph., vol. 41, no. 4, pp. 1–18, 2022
2022
-
[46]
CasADi – a software framework for nonlinear optimization and optimal control,
J. A. E. Andersson, J. Gillis, G. Horn, J. B. Rawlings, and M. Diehl, “CasADi – a software framework for nonlinear optimization and optimal control,”Math. Program. Comput., vol. 11, no. 1, pp. 1–36, 2019
2019
-
[47]
SNOPT: An SQP algorithm for large-scale constrained optimization,
P. E. Gill, W. Murray, and M. A. Saunders, “SNOPT: An SQP algorithm for large-scale constrained optimization,”SIAM Rev., vol. 47, no. 1, pp. 99–131, 2005
2005
-
[48]
On the implementation of an interior- point filter line-search algorithm for large-scale nonlinear programming,
A. W ¨achter and L. T. Biegler, “On the implementation of an interior- point filter line-search algorithm for large-scale nonlinear programming,” Math. Program., vol. 106, no. 1, pp. 25–57, 2006
2006
-
[49]
Foundationpose: Unified 6d pose estimation and tracking of novel objects,
B. Wen, W. Yang, J. Kautz, and S. Birchfield, “Foundationpose: Unified 6d pose estimation and tracking of novel objects,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2024, pp. 17 868–17 879
2024
-
[50]
Visualmimic: Visual humanoid loco-manipulation via motion tracking and generation,
S. Yin, Y . Ze, H.-X. Yu, C. K. Liu, and J. Wu, “Visualmimic: Visual humanoid loco-manipulation via motion tracking and generation,”arXiv preprint arXiv:2509.20322, 2025
-
[51]
Learning soccer skills for humanoid robots: A progressive perception- action framework,
J. Kong, X. Liu, Y . Lin, J. Han, S. Schwertfeger, C. Bai, and X. Li, “Learning soccer skills for humanoid robots: A progressive perception- action framework,”arXiv preprint arXiv:2602.05310, 2026
-
[52]
BiDexGrasp: Coordinated Bimanual Dexterous Grasps across Object Geometries and Sizes
M. Lin, Y .-L. Wei, J. Chen, Y . Lin, S. Chen, J. Lyu, J. Chen, Y . Tang, H. Wang, and W.-S. Zheng, “Bidexgrasp: Coordinated bimanual dexterous grasps across object geometries and sizes,”arXiv preprint arXiv:2604.06589, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[53]
Grasp planning: How to choose a suitable task wrench space,
C. Borst, M. Fischer, and G. Hirzinger, “Grasp planning: How to choose a suitable task wrench space,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), vol. 1, 2004, pp. 319–325
2004
-
[54]
Storm: An integrated framework for fast joint- space model-predictive control for reactive manipulation,
M. Bhardwaj, B. Sundaralingam, A. Mousavian, N. D. Ratliff, D. Fox, F. Ramos, and B. Boots, “Storm: An integrated framework for fast joint- space model-predictive control for reactive manipulation,” inProc. Conf. Robot Learn. (CoRL), 2022, pp. 750–759
2022
-
[55]
arXiv preprint arXiv:2601.03782 (2026)
W. Huang, Y .-W. Chao, A. Mousavian, M.-Y . Liu, D. Fox, K. Mo, and L. Fei-Fei, “Pointworld: Scaling 3D world models for in-the-wild robotic manipulation,”arXiv preprint arXiv:2601.03782, 2026
-
[56]
Interprior: Scaling generative control for physics-based human-object interactions,
S. Xu, S. Schulter, M. Ziyadi, X. He, X. Fei, Y .-X. Wang, and L. Gui, “Interprior: Scaling generative control for physics-based human-object interactions,”arXiv preprint arXiv:2602.06035, 2026. APPENDIX A. Proof of Closest Approximation LetW ii ∈R n×n be the original Delassus matrix. We seek a diagonal matrixD= diag(d 1, . . . , dn)that minimizes the Fro...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.