Recognition: 2 theorem links
· Lean TheoremBiDexGrasp: Coordinated Bimanual Dexterous Grasps across Object Geometries and Sizes
Pith reviewed 2026-05-10 18:45 UTC · model grok-4.3
The pith
BiDexGrasp supplies a large dataset and a generation model that produce coordinated bimanual dexterous grasps for objects spanning many geometries and sizes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
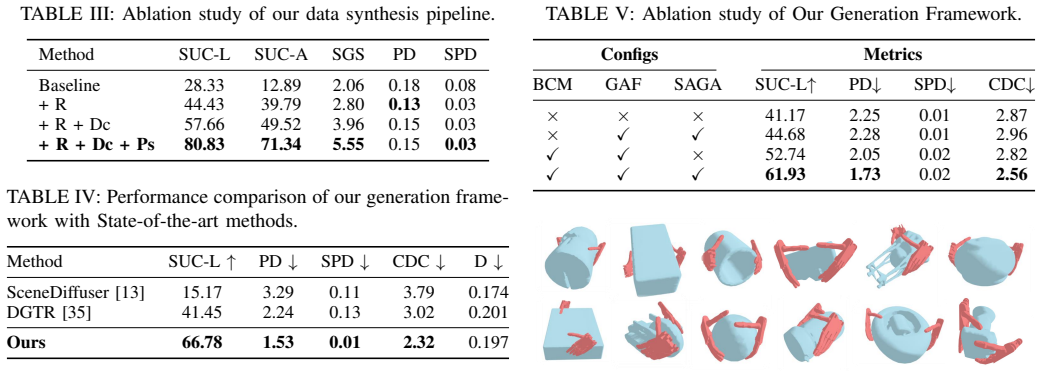
The paper establishes that a two-stage synthesis pipeline of region-based grasp initialization and decoupled force-closure optimization can annotate physically feasible bimanual dexterous grasps at scale, yielding 9.7 million examples across 6351 diverse objects from 30 to 80 cm, and that a generation framework equipped with a bimanual coordination module and a geometry-size-adaptive strategy produces high-quality coordinated grasps on unseen objects, as shown by extensive simulation tests and real-world robot execution.
What carries the argument
The two-stage bimanual grasp synthesis pipeline of region-based initialization plus decoupled force-closure optimization, which supplies the training data for the model that adds explicit bimanual coordination and geometry-size adaptation.
If this is right
- The method generates coordinated grasps for objects whose sizes range continuously from 30 to 80 cm.
- Grasps produced by the model satisfy force-closure conditions and can be executed by real robots.
- The same trained model works on objects outside the training set without retraining or fine-tuning.
- The dataset construction process scales to thousands of objects while maintaining physical feasibility.
Where Pith is reading between the lines
- The approach could lower the cost of collecting bimanual grasp data by replacing manual labeling with automated synthesis.
- It opens a path to planning sequences of bimanual actions, such as handing an object from one hand to the other.
- Pairing the model with onboard sensing might support real-time grasp selection for novel household items.
Load-bearing premise
The two-stage synthesis pipeline produces grasps that remain physically feasible when transferred from simulation to real robot hardware without major performance loss.
What would settle it
Running the model's output grasps on a physical bimanual robot with dexterous hands across a collection of previously unseen objects and recording frequent cases where the grasps fail to achieve stable, coordinated contact.
Figures








read the original abstract
Bimanual dexterous grasping is a fundamental and promising area in robotics, yet its progress is constrained by the lack of comprehensive datasets and powerful generation models. In this work, we propose BiDexGrasp, consists of a large-scale bimanual dexterous grasp dataset and a novel generation model. For dataset, we propose a novel bimanual grasp synthesis pipeline to efficiently annotate physically feasible data for dataset construction. This pipeline addresses the challenges of high-dimensional bimanual grasping through a two-stage synthesis strategy of efficient region-based grasp initialization and decoupled force-closure grasp optimization. Powered by this pipeline, we construct a large-scale bimanual dexterous grasp dataset, comprising 6351 diverse objects with sizes ranging from 30 to 80 cm, along with 9.7 million annotated grasp data. Based on this dataset, we further introduce a bimanual-coordinated and geometry-size-adaptive dexterous grasping generation framework. The framework lies in two key designs: a bimanual coordination module and a geometry-size-adaptive grasp generation strategy to generate coordinated and high-quality grasps on unseen objects. Extensive experiments conducted in both simulation and real world demonstrate the superior performance of our proposed data synthesis pipeline and learned generative framework.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces BiDexGrasp, a bimanual dexterous grasping generation framework. It constructs a large-scale dataset of 9.7 million grasps across 6351 objects of sizes 30-80 cm using a two-stage synthesis pipeline (region-based grasp initialization followed by decoupled force-closure optimization). The generation model incorporates a bimanual coordination module and a geometry-size-adaptive strategy. Extensive simulation and real-world experiments are reported to demonstrate superior performance in generating coordinated grasps on unseen objects.
Significance. Should the central claims hold, this work would provide a valuable resource for the robotics community through its large and diverse dataset and a model capable of handling bimanual coordination across varying object sizes. The scale (9.7M grasps) and real-world validation are particular strengths that could facilitate further research in dexterous manipulation.
major comments (1)
- The synthesis pipeline is described as using 'decoupled force-closure grasp optimization' after region-based initialization. This decoupling raises a concern for the central claim, as it may not enforce bimanual coordination (e.g., combined resistance to external wrenches or stable inter-hand poses), potentially leading to training data that does not support the bimanual coordination module's effectiveness on unseen objects across the 30-80 cm range.
minor comments (1)
- The abstract states 'superior performance' without referencing specific metrics, tables, or baselines; including key results would improve clarity.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of our work's potential value to the community and for the constructive major comment. We address the concern point by point below.
read point-by-point responses
-
Referee: The synthesis pipeline is described as using 'decoupled force-closure grasp optimization' after region-based initialization. This decoupling raises a concern for the central claim, as it may not enforce bimanual coordination (e.g., combined resistance to external wrenches or stable inter-hand poses), potentially leading to training data that does not support the bimanual coordination module's effectiveness on unseen objects across the 30-80 cm range.
Authors: The region-based initialization explicitly samples coordinated bimanual configurations by jointly considering contact regions for both hands relative to object geometry and size, producing initial poses with stable inter-hand spacing and orientation. The subsequent decoupled force-closure optimization refines each hand independently for grasp quality metrics while holding the relative rigid transformation between the two hands fixed from the initialization output. This design choice enables scalable synthesis of 9.7 million grasps without sacrificing the coordinated structure present in the initial proposals. Combined wrench resistance is achieved because each hand satisfies force closure under the shared object frame, and our simulation validation (including external perturbation tests across the 30-80 cm range) confirms overall grasp stability. The bimanual coordination module is trained directly on these data to learn and reproduce the coordinated patterns, which is further evidenced by superior performance on unseen objects in both simulation and real-world experiments. We have added a short clarifying paragraph in Section 3.2 of the revised manuscript to make the preservation of relative poses explicit. revision: partial
Circularity Check
No significant circularity; synthesis pipeline and generative model remain independent.
full rationale
The paper constructs its 9.7M-grasp dataset via an explicit two-stage synthesis pipeline (region-based initialization followed by decoupled force-closure optimization) that operates without reference to the downstream generative framework. The bimanual coordination module and geometry-size-adaptive strategy are then trained on this independently generated data to generalize to unseen objects. No equations, fitted parameters, or self-citations are shown to reduce the claimed outputs to quantities defined by the inputs themselves. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Region-based grasp initialization followed by decoupled force-closure optimization produces physically feasible bimanual grasps.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
decoupled force-closure grasp optimization... min (wQ-left Q(Gleft) + wQ-right Q(Gright) + ... ) s.t. no collision
-
IndisputableMonolith/Foundation/BranchSelection.leanbranch_selection unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
bimanual coordination module... geometry-size-adaptive grasp generation strategy
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Jiayi Chen, Yuxing Chen, Jialiang Zhang, and He Wang. Task-oriented dexterous grasp synthesis via differen- tiable grasp wrench boundary estimator.arXiv preprint arXiv:2309.13586, 2023
-
[2]
Bodex: Scalable and efficient robotic dexterous grasp synthesis using bilevel optimization
Jiayi Chen, Yubin Ke, and He Wang. Bodex: Scalable and efficient robotic dexterous grasp synthesis using bilevel optimization. In2025 IEEE International Conference on Robotics and Automation (ICRA), pages 01–08. IEEE, 2025
2025
-
[3]
Bi-dexhands: Towards human-level bimanual dexterous manipulation.IEEE Transactions on Pattern Analysis and Machine Intelligence, 46(5):2804–2818, 2023
Yuanpei Chen, Yiran Geng, Fangwei Zhong, Jiaming Ji, Jiechuang Jiang, Zongqing Lu, Hao Dong, and Yaodong Yang. Bi-dexhands: Towards human-level bimanual dexterous manipulation.IEEE Transactions on Pattern Analysis and Machine Intelligence, 46(5):2804–2818, 2023
2023
-
[4]
Zeyuan Chen, Qiyang Yan, Yuanpei Chen, Tianhao Wu, Jiyao Zhang, Zihan Ding, Jinzhou Li, Yaodong Yang, and Hao Dong. Clutterdexgrasp: A sim-to-real system for general dexterous grasping in cluttered scenes.arXiv preprint arXiv:2506.14317, 2025
-
[5]
Yu Cui, Yujian Zhang, Lina Tao, Yang Li, Xinyu Yi, and Zhibin Li. End-to-end dexterous arm-hand vla policies via shared autonomy: Vr teleoperation augmented by autonomous hand vla policy for efficient data collection. arXiv preprint arXiv:2511.00139, 2025
-
[6]
Objaverse: A universe of annotated 3d objects
Matt Deitke, Dustin Schwenk, Jordi Salvador, Luca Weihs, Oscar Michel, Eli VanderBilt, Ludwig Schmidt, Kiana Ehsani, Aniruddha Kembhavi, and Ali Farhadi. Objaverse: A universe of annotated 3d objects. InPro- ceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 13142–13153, 2023
2023
-
[7]
A point set generation network for 3d object reconstruction from a single image
Haoqiang Fan, Hao Su, and Leonidas J Guibas. A point set generation network for 3d object reconstruction from a single image. InProceedings of the IEEE conference on computer vision and pattern recognition, pages 605– 613, 2017
2017
-
[8]
Graspnet-1billion: A large-scale benchmark for general object grasping
Hao-Shu Fang, Chenxi Wang, Minghao Gou, and Cewu Lu. Graspnet-1billion: A large-scale benchmark for general object grasping. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 11444–11453, 2020
2020
-
[9]
Hao-Shu Fang, Hengxu Yan, Zhenyu Tang, Hongjie Fang, Chenxi Wang, and Cewu Lu. Anydex- grasp: General dexterous grasping for different hands with human-level learning efficiency.arXiv preprint arXiv:2502.16420, 2025
-
[10]
DexVLG: Dexterous vision-language-grasp model at scale,
Jiawei He, Danshi Li, Xinqiang Yu, Zekun Qi, Wenyao Zhang, Jiayi Chen, Zhaoxiang Zhang, Zhizheng Zhang, Li Yi, and He Wang. Dexvlg: Dexterous vision-language- grasp model at scale.arXiv preprint arXiv:2507.02747, 2025
-
[11]
Denoising diffusion probabilistic models.Advances in neural infor- mation processing systems, 33:6840–6851, 2020
Jonathan Ho, Ajay Jain, and Pieter Abbeel. Denoising diffusion probabilistic models.Advances in neural infor- mation processing systems, 33:6840–6851, 2020
2020
-
[12]
Fungrasp: functional grasping for diverse dexterous hands.IEEE Robotics and Automation Letters, 2025
Linyi Huang, Hui Zhang, Zijian Wu, Sammy Christen, and Jie Song. Fungrasp: functional grasping for diverse dexterous hands.IEEE Robotics and Automation Letters, 2025
2025
-
[13]
Diffusion-based generation, optimization, and planning in 3d scenes
Siyuan Huang, Zan Wang, Puhao Li, Baoxiong Jia, Tengyu Liu, Yixin Zhu, Wei Liang, and Song-Chun Zhu. Diffusion-based generation, optimization, and planning in 3d scenes. InProceedings of the IEEE/CVF Confer- ence on Computer Vision and Pattern Recognition, pages 16750–16761, 2023
2023
-
[14]
Hyper3d: Ai-powered 3d model generator,
Hyper3D. Hyper3d: Ai-powered 3d model generator,
-
[15]
URL https://hyper3d.ai/
-
[16]
Hand-object contact consistency reasoning for human grasps generation
Hanwen Jiang, Shaowei Liu, Jiashun Wang, and Xiao- long Wang. Hand-object contact consistency reasoning for human grasps generation. InProceedings of the IEEE/CVF international conference on computer vision, pages 11107–11116, 2021
2021
-
[17]
Maniptrans: Efficient dexterous bimanual ma- nipulation transfer via residual learning
Kailin Li, Puhao Li, Tengyu Liu, Yuyang Li, and Siyuan Huang. Maniptrans: Efficient dexterous bimanual ma- nipulation transfer via residual learning. InProceedings of the Computer Vision and Pattern Recognition Confer- ence, pages 6991–7003, 2025
2025
-
[18]
Quanzhou Li, Zhonghua Wu, Jingbo Wang, Chen Change Loy, and Bo Dai. Dhagrasp: Synthesizing affordance- aware dual-hand grasps with text instructions.arXiv preprint arXiv:2509.22175, 2025
-
[19]
Yuhao Lin, Yi-Lin Wei, Haoran Liao, Mu Lin, Chengyi Xing, Hao Li, Dandan Zhang, Mark Cutkosky, and Wei- Shi Zheng. Typetele: Releasing dexterity in teleoper- ation by dexterous manipulation types.arXiv preprint arXiv:2507.01857, 2025
-
[20]
Deep differentiable grasp planner for high-dof grippers.arXiv preprint arXiv:2002.01530, 2020
Min Liu, Zherong Pan, Kai Xu, Kanishka Ganguly, and Dinesh Manocha. Deep differentiable grasp planner for high-dof grippers.arXiv preprint arXiv:2002.01530, 2020
-
[21]
Tengyu Liu, Zeyu Liu, Ziyuan Jiao, Yixin Zhu, and Song- Chun Zhu. Synthesizing diverse and physically stable grasps with arbitrary hand structures using differentiable force closure estimator.IEEE Robotics and Automation Letters, 7(1):470–477, 2021
2021
-
[22]
SGDR: Stochastic Gradient Descent with Warm Restarts
Ilya Loshchilov and Frank Hutter. Sgdr: Stochastic gradient descent with warm restarts.arXiv preprint arXiv:1608.03983, 2016
work page internal anchor Pith review arXiv 2016
-
[23]
Ugg: Unified generative grasping
Jiaxin Lu, Hao Kang, Haoxiang Li, Bo Liu, Yiding Yang, Qixing Huang, and Gang Hua. Ugg: Unified generative grasping. InEuropean Conference on Computer Vision, pages 414–433. Springer, 2024
2024
-
[24]
Robotwin: Dual-arm robot benchmark with generative digital twins (early version)
Yao Mu, Tianxing Chen, Shijia Peng, Zanxin Chen, Zeyu Gao, Yude Zou, Lunkai Lin, Zhiqiang Xie, and Ping Luo. Robotwin: Dual-arm robot benchmark with generative digital twins (early version). InEuropean Conference on Computer Vision, pages 264–273. Springer, 2024
2024
-
[25]
Pointnet++: Deep hierarchical feature learning on point sets in a metric space.Advances in neural information processing systems, 30, 2017
Charles Ruizhongtai Qi, Li Yi, Hao Su, and Leonidas J Guibas. Pointnet++: Deep hierarchical feature learning on point sets in a metric space.Advances in neural information processing systems, 30, 2017
2017
-
[26]
Unigrasp: Learning a unified model to grasp with multifingered robotic hands
Lin Shao, Fabio Ferreira, Mikael Jorda, Varun Nambiar, Jianlan Luo, Eugen Solowjow, Juan Aparicio Ojea, Ous- sama Khatib, and Jeannette Bohg. Unigrasp: Learning a unified model to grasp with multifingered robotic hands. IEEE Robotics and Automation Letters, 5(2):2286–2293, 2020
2020
-
[27]
Bimanual grasp syn- thesis for dexterous robot hands.IEEE Robotics and Automation Letters, 2024
Yanming Shao and Chenxi Xiao. Bimanual grasp syn- thesis for dexterous robot hands.IEEE Robotics and Automation Letters, 2024
2024
-
[28]
Leap hand: Low-cost, effi- cient, and anthropomorphic hand for robot learning,
Kenneth Shaw, Ananye Agarwal, and Deepak Pathak. Leap hand: Low-cost, efficient, and anthropomor- phic hand for robot learning.arXiv preprint arXiv:2309.06440, 2023
-
[29]
Bimanual dexterity for complex tasks
Kenneth Shaw, Yulong Li, Jiahui Yang, Mohan Kumar Srirama, Ray Liu, Haoyu Xiong, Russell Mendonca, and Deepak Pathak. Bimanual dexterity for complex tasks. arXiv preprint arXiv:2411.13677, 2024
-
[30]
Balakumar Sundaralingam, Siva Kumar Sastry Hari, Adam Fishman, Caelan Garrett, Karl Van Wyk, Valts Blukis, Alexander Millane, Helen Oleynikova, Ankur Handa, Fabio Ramos, et al. curobo: Parallelized collision- free minimum-jerk robot motion generation.arXiv preprint arXiv:2310.17274, 2023
-
[31]
Dexgraspnet: A large-scale robotic dexterous grasp dataset for general objects based on simulation,
Ruicheng Wang, Jialiang Zhang, Jiayi Chen, Yinzhen Xu, Puhao Li, Tengyu Liu, and He Wang. Dexgrasp- net: A large-scale robotic dexterous grasp dataset for general objects based on simulation.arXiv preprint arXiv:2210.02697, 2022
-
[32]
Grasp as you say: Language-guided dexter- ous grasp generation.Advances in Neural Information Processing Systems, 37:46881–46907, 2024
Yi-Lin Wei, Jian-Jian Jiang, Chengyi Xing, Xian-Tuo Tan, Xiao-Ming Wu, Hao Li, Mark Cutkosky, and Wei- Shi Zheng. Grasp as you say: Language-guided dexter- ous grasp generation.Advances in Neural Information Processing Systems, 37:46881–46907, 2024
2024
-
[33]
Yi-Lin Wei, Mu Lin, Yuhao Lin, Jian-Jian Jiang, Xiao- Ming Wu, Ling-An Zeng, and Wei-Shi Zheng. Af- forddexgrasp: Open-set language-guided dexterous grasp with generalizable-instructive affordance.arXiv preprint arXiv:2503.07360, 2025
-
[34]
Omnidexgrasp: Generalizable dexterous grasping via foun- dation model and force feedback,
Yi-Lin Wei, Zhexi Luo, Yuhao Lin, Mu Lin, Zhizhao Liang, Shuoyu Chen, and Wei-Shi Zheng. Om- nidexgrasp: Generalizable dexterous grasping via foun- dation model and force feedback.arXiv preprint arXiv:2510.23119, 2025
-
[35]
Dreamvideo: Com- posing your dream videos with customized subject and motion
Zhenyu Wei, Zhixuan Xu, Jingxiang Guo, Yiwen Hou, Chongkai Gao, Zhehao Cai, Jiayu Luo, and Lin Shao. D (r, o) grasp: A unified representation of robot and ob- ject interaction for cross-embodiment dexterous grasping. arXiv preprint arXiv:2410.01702, 2024
-
[36]
Dexterous grasp transformer
Guo-Hao Xu, Yi-Lin Wei, Dian Zheng, Xiao-Ming Wu, and Wei-Shi Zheng. Dexterous grasp transformer. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 17933–17942, 2024
2024
-
[37]
Unidexgrasp: Universal robotic dexterous grasping via learning diverse proposal generation and goal-conditioned policy
Yinzhen Xu, Weikang Wan, Jialiang Zhang, Haoran Liu, Zikang Shan, Hao Shen, Ruicheng Wang, Haoran Geng, Yijia Weng, Jiayi Chen, et al. Unidexgrasp: Universal robotic dexterous grasping via learning diverse proposal generation and goal-conditioned policy. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 4737–4746, 2023
2023
-
[38]
Jianglong Ye, Keyi Wang, Chengjing Yuan, Ruihan Yang, Yiquan Li, Jiyue Zhu, Yuzhe Qin, Xueyan Zou, and Xiaolong Wang. Dex1b: Learning with 1b demon- strations for dexterous manipulation.arXiv preprint arXiv:2506.17198, 2025
-
[39]
Haoqi Yuan, Ziye Huang, Ye Wang, Chuan Mao, Chaoyi Xu, and Zongqing Lu. Demograsp: Universal dexterous grasping from a single demonstration.arXiv preprint arXiv:2509.22149, 2025
-
[40]
Artigrasp: Physically plausible synthesis of bi-manual dexterous grasping and articulation
Hui Zhang, Sammy Christen, Zicong Fan, Luocheng Zheng, Jemin Hwangbo, Jie Song, and Otmar Hilliges. Artigrasp: Physically plausible synthesis of bi-manual dexterous grasping and articulation. In2024 Interna- tional Conference on 3D Vision (3DV), pages 235–246. IEEE, 2024
2024
-
[41]
Robustdex- grasp: Robust dexterous grasping of general objects,
Hui Zhang, Zijian Wu, Linyi Huang, Sammy Christen, and Jie Song. Robustdexgrasp: Robust dexterous grasp- ing of general objects.arXiv preprint arXiv:2504.05287, 2025
-
[42]
Dexgraspnet 2.0: Learning generative dexterous grasping in large-scale synthetic cluttered scenes
Jialiang Zhang, Haoran Liu, Danshi Li, XinQiang Yu, Haoran Geng, Yufei Ding, Jiayi Chen, and He Wang. Dexgraspnet 2.0: Learning generative dexterous grasping in large-scale synthetic cluttered scenes. In8th Annual Conference on Robot Learning, 2024
2024
-
[43]
arXiv preprint arXiv:2502.20900 (2025)
Yifan Zhong, Xuchuan Huang, Ruochong Li, Ceyao Zhang, Zhang Chen, Tianrui Guan, Fanlian Zeng, Ka Num Lui, Yuyao Ye, Yitao Liang, et al. Dexgraspvla: A vision-language-action framework towards general dexterous grasping.arXiv preprint arXiv:2502.20900, 2025
-
[44]
Dexgrasp anything: Towards universal robotic dexterous grasping with physics awareness
Yiming Zhong, Qi Jiang, Jingyi Yu, and Yuexin Ma. Dexgrasp anything: Towards universal robotic dexterous grasping with physics awareness. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 22584–22594, 2025
2025
-
[45]
Graspqp: Differentiable optimization of force closure for diverse and robust dexterous grasp- ing,
Ren ´e Zurbr ¨ugg, Andrei Cramariuc, and Marco Hutter. Graspqp: Differentiable optimization of force closure for diverse and robust dexterous grasping.arXiv preprint arXiv:2508.15002, 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.