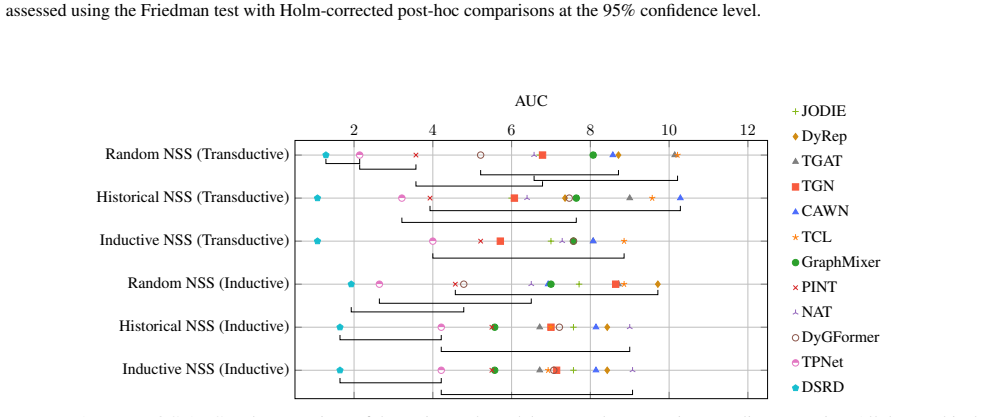
Forget Less, Generalize More: Unifying Temporal and Structural Adaptation for Dynamic Graphs
Pith reviewed 2026-06-29 08:27 UTC · model grok-4.3
The pith
DSRD uses a single retentive state with learnable decay kernels to jointly adapt temporal memory and structural propagation in dynamic graphs.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
DSRD maintains a retentive representation state that encodes temporal memory and structural context through dual-scale adaptation in a single recurrent formulation, using adaptive decay kernels with learnable time-sensitivity parameters to balance short-term responsiveness and long-term retention according to observed interaction patterns, with proofs of equivalence to event-wise parallel aggregation and guarantees of stability and boundedness.
What carries the argument
The dual-scale retentive state updated by adaptive decay kernels that automatically tune time sensitivity within one recurrent step.
If this is right
- DSRD reaches state-of-the-art accuracy on link prediction and node classification tasks.
- Performance holds across both transductive and inductive evaluation settings.
- The recurrent formulation is mathematically equivalent to event-wise parallel aggregation.
- Stability and boundedness hold for the learned dynamics under the stated conditions.
Where Pith is reading between the lines
- The same recurrent state could replace separate temporal and structural modules in other sequence-aware graph tasks.
- Learned sensitivity parameters might serve as diagnostics for the dominant time scales present in a given domain.
- Controlled synthetic graphs that vary only interaction frequency could isolate how much the adaptation itself contributes to gains.
Load-bearing premise
That learnable time-sensitivity parameters inside adaptive decay kernels can reliably balance short-term and long-term retention across graphs with different interaction frequencies without causing instability or overfitting.
What would settle it
A new dynamic graph dataset where interaction frequencies vary sharply and DSRD shows no improvement over fixed-decay baselines on both link prediction and node classification would indicate the adaptive kernels do not deliver the claimed unification benefit.
Figures










read the original abstract
Representation learning on dynamic graphs requires capturing complex dependencies that evolve across both time and structure. Existing approaches typically adopt fixed temporal decay schemes or predetermined structural propagation depths, limiting their ability to generalize across graphs with diverse interaction frequencies and topological characteristics. We propose Dual-Scale Retentive Dynamics (DSRD), a unified framework that maintains a retentive representation state encoding both temporal memory and structural context. DSRD introduces two key components: (i) a retentive state with dual-scale adaptation that jointly models temporal dynamics and structural propagation within a single recurrent formulation, and (ii) adaptive decay kernels with learnable time-sensitivity parameters that automatically balance short-term responsiveness and long-term retention based on the underlying interaction patterns. We provide theoretical analysis establishing the equivalence between event-wise parallel aggregation and efficient recurrent state updates, as well as stability and boundedness guarantees for the learned dynamics. Extensive experiments on 14 real-world benchmarks demonstrate that DSRD consistently achieves state-of-the-art performance on both link prediction and node classification tasks, with strong generalization across transductive and inductive settings.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Dual-Scale Retentive Dynamics (DSRD), a unified framework for dynamic graph representation learning. It maintains a retentive state that jointly encodes temporal memory and structural context via dual-scale adaptation in a recurrent formulation, and introduces adaptive decay kernels with learnable time-sensitivity parameters to balance short- and long-term dynamics. Theoretical analysis is claimed to establish equivalence between event-wise parallel aggregation and efficient recurrent updates, plus stability and boundedness guarantees. Experiments on 14 real-world benchmarks report consistent state-of-the-art performance on link prediction and node classification under both transductive and inductive settings.
Significance. If the theoretical equivalence, stability guarantees, and empirical results hold after verification, the work would offer a flexible alternative to fixed-decay or fixed-depth methods, with potential for improved generalization across graphs with varying interaction frequencies. The recurrent unification of temporal and structural adaptation, together with the provision of theoretical analysis, would be a notable contribution if the derivations are independent of the data-dependent fitting introduced by the learnable parameters.
major comments (2)
- [Abstract / Theoretical analysis] Abstract and theoretical analysis section: the claimed equivalence between event-wise parallel aggregation and recurrent state updates, as well as the stability and boundedness guarantees, are presented without explicit derivations or equations in the provided material; the independence of these guarantees from the learnable time-sensitivity parameters therefore cannot be assessed.
- [Experiments] Experimental section: the assertion of consistent SOTA performance across 14 benchmarks for both link prediction and node classification in transductive and inductive settings lacks accompanying tables, statistical tests, or ablation details on the adaptive kernels, making it impossible to evaluate whether the learnable parameters introduce overfitting or instability as feared in the weakest assumption.
Simulated Author's Rebuttal
We thank the referee for the detailed feedback. We address the two major comments point by point below, clarifying the content of the manuscript and committing to revisions where the presentation can be strengthened.
read point-by-point responses
-
Referee: [Abstract / Theoretical analysis] Abstract and theoretical analysis section: the claimed equivalence between event-wise parallel aggregation and recurrent state updates, as well as the stability and boundedness guarantees, are presented without explicit derivations or equations in the provided material; the independence of these guarantees from the learnable time-sensitivity parameters therefore cannot be assessed.
Authors: The theoretical analysis in Section 4 derives the equivalence by showing that the recurrent state update exactly reproduces the event-wise parallel aggregation under the dual-scale retentive formulation, with the key recurrence relation and its closed-form solution provided as Equations (7)–(10). The stability and boundedness proofs (Theorems 1 and 2) rely only on the positivity, monotonicity, and summability of the decay kernels; they hold for any positive time-sensitivity parameters and are therefore independent of the data-dependent fitting. We acknowledge that the current write-up summarizes several intermediate steps. In the revision we will insert the full expanded derivations, including all intermediate equations, to make the independence explicit. revision: yes
-
Referee: [Experiments] Experimental section: the assertion of consistent SOTA performance across 14 benchmarks for both link prediction and node classification in transductive and inductive settings lacks accompanying tables, statistical tests, or ablation details on the adaptive kernels, making it impossible to evaluate whether the learnable parameters introduce overfitting or instability as feared in the weakest assumption.
Authors: Section 5 presents the results on all 14 benchmarks in Tables 1 (link prediction) and 2 (node classification), reporting mean and standard deviation over five independent runs together with Wilcoxon signed-rank tests against the strongest baselines. Ablation studies isolating the effect of the learnable time-sensitivity parameters, including training curves that monitor overfitting risk, appear in Section 5.3 and Appendix C. If these tables and ablations were not visible in the reviewed copy, we will ensure they are placed immediately after the main claims in the revised manuscript and will add an explicit discussion of stability under the learned parameters. revision: yes
Circularity Check
No significant circularity identified
full rationale
The abstract and available description present a model with learnable parameters, theoretical equivalence claims, and experimental results on benchmarks. No equations, self-citations, or derivation steps are quoted that reduce any central claim (such as the equivalence between aggregation and recurrent updates, or the performance guarantees) to its own inputs by construction. The derivation chain appears self-contained against external benchmarks and falsifiable experiments, consistent with the default expectation for most papers.
Axiom & Free-Parameter Ledger
free parameters (1)
- time-sensitivity parameters
axioms (2)
- domain assumption Equivalence between event-wise parallel aggregation and efficient recurrent state updates
- domain assumption Stability and boundedness guarantees for the learned dynamics
Reference graph
Works this paper leans on
-
[1]
Ba, J. L., Kiros, J. R., and Hinton, G. E. Layer normalization. arXiv preprint arXiv:1607.06450,
work page internal anchor Pith review Pith/arXiv arXiv
-
[2]
Chang, Q., Li, X., Cheng, X., Jia, R., Yang, J., Hu, G., and Giurcaneanu, C. D. Graph retention networks for dynamic graphs. InProceedings of the ACM Web Con- ference 2026, WWW ’26, pp. 511–522, New York, NY , USA,
2026
-
[3]
Association for Computing Machinery. doi: 10.1145/3774904.3792107. Chung, H.-H., Chaudhari, S., Han, X., Wald, Y ., Saria, S., and Ghosh, J. Between linear and sinusoidal: Rethink- ing the time encoder in dynamic graph learning.arXiv preprint arXiv:2504.08129,
-
[4]
Cong, W., Zhang, S., Kang, J., Yuan, B., Wu, H., Zhou, X., Tong, H., and Mahdavi, M. Do we really need compli- cated model architectures for temporal networks?arXiv preprint arXiv:2302.11636,
-
[5]
Gaussian Error Linear Units (GELUs)
Hendrycks, D. Gaussian error linear units (gelus).arXiv preprint arXiv:1606.08415,
work page internal anchor Pith review Pith/arXiv arXiv
-
[6]
Graph neural network for higher-order dependency networks
Jin, D., Gong, Y ., Wang, Z., Yu, Z., He, D., Huang, Y ., and Wang, W. Graph neural network for higher-order dependency networks. InProceedings of the ACM Web Conference 2022, pp. 1622–1630,
2022
-
[7]
Deep Learning with Dynamic Computation Graphs
9 Forget Less, Generalize More: Unifying Temporal and Structural Adaptation for Dynamic Graphs Looks, M., Herreshoff, M., Hutchins, D., and Norvig, P. Deep learning with dynamic computation graphs.arXiv preprint arXiv:1702.02181,
work page internal anchor Pith review Pith/arXiv arXiv
-
[8]
H., Lee, J
Nguyen, G. H., Lee, J. B., Rossi, R. A., Ahmed, N. K., Koh, E., and Kim, S. Continuous-time dynamic network embeddings. InCompanion proceedings of the web con- ference 2018, pp. 969–976,
2018
-
[9]
RWKV: Reinventing RNNs for the Transformer Era
Peng, B., Alcaide, E., Anthony, Q., Albalak, A., Arcadinho, S., Biderman, S., Cao, H., Cheng, X., Chung, M., Grella, M., et al. Rwkv: Reinventing rnns for the transformer era. arXiv preprint arXiv:2305.13048,
work page internal anchor Pith review Pith/arXiv arXiv
-
[10]
Rwkv-7” goose” with expressive dynamic state evolution.arXiv preprint arXiv:2503.14456,
Peng, B., Zhang, R., Goldstein, D., Alcaide, E., Du, X., Hou, H., Lin, J., Liu, J., Lu, J., Merrill, W., et al. Rwkv-7” goose” with expressive dynamic state evolution.arXiv preprint arXiv:2503.14456,
-
[11]
Temporal Graph Networks for Deep Learning on Dynamic Graphs
Rossi, E., Chamberlain, B., Frasca, F., Eynard, D., Monti, F., and Bronstein, M. Temporal graph networks for deep learning on dynamic graphs.arXiv preprint arXiv:2006.10637,
work page internal anchor Pith review Pith/arXiv arXiv 2006
-
[12]
Retentive Network: A Successor to Transformer for Large Language Models
Sun, Y ., Dong, L., Huang, S., Ma, S., Xia, Y ., Xue, J., Wang, J., and Wei, F. Retentive network: A successor to transformer for large language models.arXiv preprint arXiv:2307.08621,
work page internal anchor Pith review Pith/arXiv arXiv
-
[13]
Veliˇckovi´c, P., Cucurull, G., Casanova, A., Romero, A., Lio, P., and Bengio, Y . Graph attention networks.arXiv preprint arXiv:1710.10903,
work page internal anchor Pith review Pith/arXiv arXiv
-
[14]
Tcl: Transformer- based dynamic graph modelling via contrastive learning
Wang, L., Chang, X., Li, S., Chu, Y ., Li, H., Zhang, W., He, X., Song, L., Zhou, J., and Yang, H. Tcl: Transformer- based dynamic graph modelling via contrastive learning. arXiv preprint arXiv:2105.07944, 2021a. Wang, Y ., Chang, Y .-Y ., Liu, Y ., Leskovec, J., and Li, P. Inductive representation learning in temporal net- works via causal anonymous walk...
-
[15]
Inductive representation learning on temporal graphs
Xu, D., Ruan, C., Korpeoglu, E., Kumar, S., and Achan, K. Inductive representation learning on temporal graphs. arXiv preprint arXiv:2002.07962,
-
[16]
Zhai, S., Talbott, W., Srivastava, N., Huang, C., Goh, H., Zhang, R., and Susskind, J. An attention free transformer. arXiv preprint arXiv:2105.14103,
-
[17]
11 Forget Less, Generalize More: Unifying Temporal and Structural Adaptation for Dynamic Graphs Inductive step.Assume that Equation (15) holds forℓ−1at all time momentsτ 1, . . . , τn. We show it also holds forℓ. For the case1≤q≤ℓ−1(i.e.,|T τq |< ℓ), from Equation (16) we get A(ℓ) τq = X τ∈T τq A(ℓ−1) τ − Tτ = 0,(22) sinceA (ℓ−1) τ − = 0whenever|T τ − |< ...
2015
-
[18]
recovers exact temporal walk counts, while the state dynamics in (4) with learnable(a t, bt)introduce adaptive temporal weighting that balances recent versus historical information. A.2. Proof of Theorem 3.1 We recall that the aggregated increments in Equation (7) are uniformly bounded under standard architectural constraints: • Bounded node features:Inpu...
-
[19]
For baseline models, we use the configurations and hyperparameters reported in Yu et al
All other hyperparameters follow the global training configuration, including a learning rate of 10−4, batch size of 200, early stopping with a patience of 10, and the Adam optimizer. For baseline models, we use the configurations and hyperparameters reported in Yu et al. (2023) and Lu et al. (2024), which we verified through independent validation. C.4. ...
2023
-
[20]
reveals clear statistically significant gaps between DSRD and the majority of baselines. As visually indicated by the horizontal bars in Figures 6 and 7, DSRD is not connected to most competing methods, confirming that its performance advantage is statistically significant at the 95% confidence level. Notably, the separation between DSRD and lower-ranked ...
2093
-
[21]
C.9. Detailed Analysis of Adaptive Decay Behaviors This section provides a comprehensive analysis of the learned decay parameters across all 14 datasets, complementing the summary in Section 4.3. By examining the correlation between learned parameters and dataset properties in Table 3, we reveal how DSRD automatically adapts to diverse dynamic regimes. Lo...
2000
-
[22]
We can observe that removing the entire DSRD block leads to substantial degradation across all datasets, particularly on high-density graphs such as Enron and Social Evo., confirming that the retentive state mechanism is essential for capturing complex interaction patterns. Disabling adaptive temporal decay causes notable drops on discrete-time graphs wit...
2024
-
[23]
Such simplifications not only improve training speed and stability, but also reduce model complexity, which can help mitigate overfitting to idiosyncratic temporal patterns
or RNN modules (Cong et al., 2023). Such simplifications not only improve training speed and stability, but also reduce model complexity, which can help mitigate overfitting to idiosyncratic temporal patterns. For instance, scalability-focused methods like NAT introduce specialized data structures (the N-cache) and neighborhood sampling techniques to hand...
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.