Intent-Based Orchestration in Open RAN: An ns-3 Simulation Framework
Pith reviewed 2026-06-29 00:27 UTC · model grok-4.3
The pith
Intent-based radio resource management in Open RAN improves intent satisfaction while reducing resource usage and overhead.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper presents an extensible ns-3-based simulation framework for intent-based, semantics-aware control in Open RAN. It integrates external RIC components and supports dApps for fine-grained control. In the RRM use case, scheduling uses realistic KPMs and a new Intent Satisfaction Score combining distortion- and perception-oriented measures. Results show intent-based RRM improves ISS while significantly reducing radio resource usage and computational overhead, at the cost of moderate reductions in packet delivery ratio and throughput.
What carries the argument
The Intent Satisfaction Score (ISS), a metric that quantifies delivery of intent-relevant information by combining distortion- and perception-oriented measures, used within the ns-3 framework to guide dApp decisions.
If this is right
- Intent-based RRM can operate effectively with the limited key performance measurements available to dApps.
- Orchestration across timescales becomes feasible while preserving standardized network behavior.
- Trade-offs between intent delivery and conventional performance metrics must be considered in deployment.
- Simulation enables testing before real-world implementation of RIC and dApp components.
Where Pith is reading between the lines
- The framework may support evaluation of intent-based methods in additional RAN functions such as mobility management or interference coordination.
- Validation against physical testbeds would strengthen confidence in the observed trade-offs.
- Adoption could influence how intents are standardized in Open RAN specifications.
Load-bearing premise
The ns-3 model and the chosen key performance measurements accurately capture the observability constraints and behavior of real Open RAN dApps and RIC components.
What would settle it
Running the same intent-based RRM policy on a real Open RAN testbed and comparing the resulting Intent Satisfaction Score, resource usage, and throughput to the simulation outputs.
Figures

read the original abstract
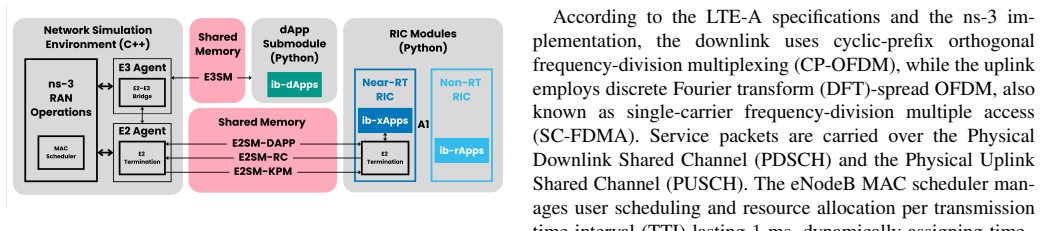
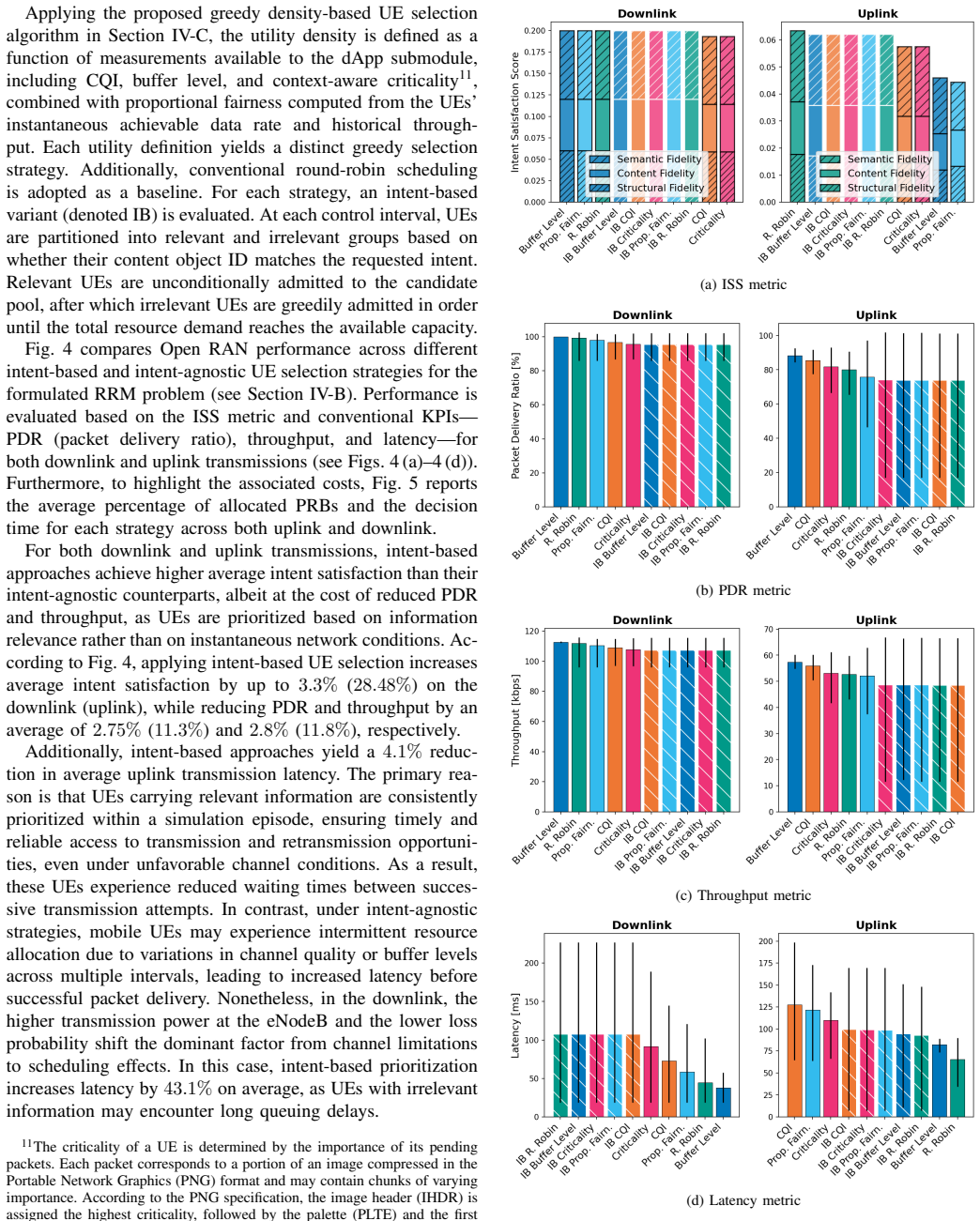
This paper presents an extensible ns-3-based simulation framework for evaluating intent-based, semantics-aware control in Open RAN architectures. The framework integrates external Radio Access Network (RAN) Intelligent Controller (RIC) components and supports fine-grained control via internal distributed applications (dApps), enabling intent-based RAN orchestration across different timescales while maintaining standardized network behavior. As an illustrative use case, we implement an intent-based dApp for radio resource management (RRM) under realistic observability constraints. The scheduling problem is formulated using realistic key performance measurements (KPMs) available to dApps, together with a newly introduced Intent Satisfaction Score (ISS), which quantifies the delivery of intent-relevant information by combining distortion- and perception-oriented measures. Simulation results show that intent-based RRM can improve ISS while significantly reducing radio resource usage and computational overhead, at the cost of a moderate reduction in packet delivery ratio and throughput.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents an extensible ns-3 simulation framework for intent-based, semantics-aware orchestration in Open RAN, integrating external RIC components with internal dApps to enable control across timescales. As an illustrative use case, it formulates an intent-based RRM dApp using realistic KPMs and introduces a new Intent Satisfaction Score (ISS) that combines distortion- and perception-oriented measures; simulation results claim that this approach improves ISS while reducing radio resource usage and computational overhead, at the cost of moderate reductions in packet delivery ratio and throughput.
Significance. If the ns-3 model faithfully captures O-RAN observability constraints, the framework would provide a reproducible environment for evaluating intent-based RRM, and the ISS metric would offer a useful composite for quantifying intent delivery. The work credits the integration of standardized network behavior with external controllers and the use of available KPMs rather than idealized assumptions.
major comments (3)
- [Simulation results] The simulation results (abstract and results section) report ISS gains and resource reductions without error bars, baseline comparisons to non-intent RRM schedulers, or statistical tests, leaving the magnitude and robustness of the claimed trade-offs difficult to evaluate.
- [ns-3 framework and dApp implementation] The framework description provides no hardware-in-the-loop validation, trace replay from live O-RAN deployments, or sensitivity analysis to E2 interface latency and RIC subscription granularity; because the central performance claims rest on the modeled observability constraints, this omission is load-bearing for transferability.
- [Intent-based RRM use case] The ISS definition (use-case section) is introduced as a new composite without explicit validation against operator intent or comparison to existing satisfaction metrics, so the reported improvements cannot be assessed independently of the simulation outputs.
minor comments (1)
- [Introduction and framework] Notation for KPMs and dApp/RIC interfaces should be defined consistently in a table or early section to aid readability.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major comment below and indicate where revisions will be incorporated.
read point-by-point responses
-
Referee: [Simulation results] The simulation results (abstract and results section) report ISS gains and resource reductions without error bars, baseline comparisons to non-intent RRM schedulers, or statistical tests, leaving the magnitude and robustness of the claimed trade-offs difficult to evaluate.
Authors: We agree that the results would be strengthened by error bars from multiple runs, explicit comparisons to non-intent RRM schedulers such as proportional fair, and statistical tests. In the revision we will re-execute the simulations across multiple random seeds, add the requested baseline comparisons, and include statistical significance analysis. revision: yes
-
Referee: [ns-3 framework and dApp implementation] The framework description provides no hardware-in-the-loop validation, trace replay from live O-RAN deployments, or sensitivity analysis to E2 interface latency and RIC subscription granularity; because the central performance claims rest on the modeled observability constraints, this omission is load-bearing for transferability.
Authors: The work presents an ns-3 simulation framework; hardware-in-the-loop validation and live trace replay are therefore outside its scope. We will, however, add a dedicated sensitivity analysis varying E2 latency and RIC subscription granularity to better substantiate transferability of the observability modeling. revision: partial
-
Referee: [Intent-based RRM use case] The ISS definition (use-case section) is introduced as a new composite without explicit validation against operator intent or comparison to existing satisfaction metrics, so the reported improvements cannot be assessed independently of the simulation outputs.
Authors: ISS is proposed as a novel composite tailored to intent semantics. Direct validation against operator intent requires industry data not available here; we will nevertheless expand the section with explicit comparisons to existing satisfaction metrics (e.g., throughput- or latency-only scores) and additional justification of the chosen components. revision: partial
Circularity Check
No circularity: simulation outputs and new composite metric are independent of inputs
full rationale
The paper describes an ns-3 simulation framework that implements intent-based RRM using KPMs and a newly defined ISS metric (combining distortion- and perception-oriented measures). Reported gains in ISS, resource usage, and overhead are direct simulation outputs under the modeled constraints; no equations, fitted parameters, or self-citations reduce these results to the inputs by construction. The derivation chain consists of model implementation followed by execution, which is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
invented entities (1)
-
Intent Satisfaction Score (ISS)
no independent evidence
Reference graph
Works this paper leans on
-
[1]
C. E. Shannon and W. Weaver,The Mathematical Theory of Communi- cation. University of Illinois Press, Urbana, 1949
1949
-
[2]
A survey on intent-based networking,
A. Leivadeas and M. Falkner, “A survey on intent-based networking,” IEEE Commun. Surveys Tuts., vol. 25, no. 1, 2022
2022
-
[3]
O-RAN architecture description,
O-RAN Alliance, “O-RAN architecture description,” O-RAN Alliance, Technical Specification v14.01, 2025
2025
-
[4]
dApps: Distributed applications for real-time inference and control in O-RAN,
S. D’Oro, M. Polese, L. Bonati, H. Cheng, and T. Melodia, “dApps: Distributed applications for real-time inference and control in O-RAN,” IEEE Commun. Mag., vol. 60, no. 11, 2022
2022
-
[5]
dApps for real-time RAN control: Use cases and requirements,
O.-R. A. N. G. R. G. (nGRG), “dApps for real-time RAN control: Use cases and requirements,”ORAN-WG3. Tech. Spec., 2024
2024
-
[6]
dApps: Enabling real-time AI-based Open RAN control,
A. Lacava, L. Bonati, N. Mohamadi, R. Gangula, F. Kaltenberger, P. Johari, S. D’Oro, F. Cuomo, M. Polese, and T. Melodia, “dApps: Enabling real-time AI-based Open RAN control,”Computer Networks, 2025
2025
-
[7]
The ns-3 network simulator,
G. F. Riley and T. R. Henderson, “The ns-3 network simulator,” in Modeling and Tools for Network Simulation. Springer, 2010, pp. 15–34
2010
-
[8]
ns-O-RAN: Simulating O-RAN 5G systems in ns-3,
A. Lacava, M. Bordin, M. Polese, R. Sivaraj, T. Zugno, F. Cuomo, and T. Melodia, “ns-O-RAN: Simulating O-RAN 5G systems in ns-3,” in Proc. ACM Wkshp. ns-3, 2023
2023
-
[9]
O-RAN with machine learning in ns-3,
W. Garey, T. Ropitault, R. Rouil, E. Black, and W. Gao, “O-RAN with machine learning in ns-3,” inProc. ACM Wkshp. ns-3, 2023
2023
-
[10]
Evolving 5G-LENA towards 6G: Integrating AI for intelligent scheduling of multi- flow traffic,
H. Kim, K. Koutlia, B. Bojovi ´c, A. Ashtari, and G. Ferreira, “Evolving 5G-LENA towards 6G: Integrating AI for intelligent scheduling of multi- flow traffic,” inProc. Int. Conf. ns-3, 2025
2025
-
[11]
ns-3 meets OpenAI Gym: The playground for machine learning in networking research,
P. Gawłowicz and A. Zubow, “ns-3 meets OpenAI Gym: The playground for machine learning in networking research,” inProc. ACM Int. Conf. Model., Anal. Simul. Wireless Mobile Syst., 2019
2019
-
[12]
Open RAN meets semantic communications: A synergistic match for open, intelligent, and knowledge-driven 6G,
P. Li and A. Aijaz, “Open RAN meets semantic communications: A synergistic match for open, intelligent, and knowledge-driven 6G,” in Proc. IEEE Conf. Standards Commun. Netw., 2023
2023
-
[13]
SEM- O-RAN: Semantic O-RAN slicing for mobile edge offloading of com- puter vision tasks,
C. Puligheddu, J. Ashdown, C. F. Chiasserini, and F. Restuccia, “SEM- O-RAN: Semantic O-RAN slicing for mobile edge offloading of com- puter vision tasks,”IEEE Trans. Mob. Comput., vol. 23, no. 7, 2023
2023
-
[14]
Semantic non-terrestrial communications with open ran-enabled 6G,
E. Zeydan, L. Blanco, C. J. Vaca-Rubio, M. Caus, and K. Dev, “Semantic non-terrestrial communications with open ran-enabled 6G,” IEEE Commun. Stand. Mag., 2025
2025
-
[15]
ALLSTaR: Automated LLM-driven scheduler generation and testing for intent- based RAN,
M. Elkael, M. Polese, R. Prasad, S. Maxenti, and T. Melodia, “ALL- STaR: Automated LLM-driven scheduler generation and testing for intent-based RAN,”arXiv:2505.18389, 2025
-
[16]
ns3-ai: Fostering artificial intelligence algorithms for networking research,
H. Yin, P. Liu, K. Liu, L. Cao, L. Zhang, Y . Gao, and X. Hei, “ns3-ai: Fostering artificial intelligence algorithms for networking research,” in Proc. ACM Wkshp. ns-3, 2020, p. 57–64
2020
-
[17]
Rethinking lossy compression: The rate- distortion-perception tradeoff,
Y . Blau and T. Michaeli, “Rethinking lossy compression: The rate- distortion-perception tradeoff,” inProc. PMLR Int. Conf. Mach. Learn., 2019
2019
-
[18]
Learning transferable visual models from natural language supervision,
A. Radford, J. W. Kim, C. Hallacy, A. Ramesh, G. Goh, S. Agarwal, G. Sastry, A. Askell, P. Mishkin, J. Clarket al., “Learning transferable visual models from natural language supervision,” inProc. PMLR Int. Conf. Mach. Learn., 2021
2021
-
[19]
Image quality assessment: from error visibility to structural similarity,
Z. Wang, A. C. Bovik, H. R. Sheikh, and E. P. Simoncelli, “Image quality assessment: from error visibility to structural similarity,”IEEE Trans. Image Process., vol. 13, no. 4, 2004
2004
-
[20]
SSIMULACRA 2: Structural similarity unveiling local and compression related artifacts,
J. Sneyers, “SSIMULACRA 2: Structural similarity unveiling local and compression related artifacts,” github.com/cloudinary/ssimulacra2, 2023, accessed: Jan. 2026
2023
-
[21]
Evolved Universal Terrestrial Radio Access (E-UTRA); Physical layer procedures,
3GPP, “Evolved Universal Terrestrial Radio Access (E-UTRA); Physical layer procedures,” 3rd Generation Partnership Project (3GPP), Tech. Rep. ETSI TS 136 213, 2018
2018
-
[22]
Multidimensional knapsack problems,
H. Kellerer, U. Pferschy, and D. Pisinger, “Multidimensional knapsack problems,” inKnapsack problems. Springer, 2004
2004
-
[23]
E-UTRA; User Equipment radio transmission and reception,
3GPP, “E-UTRA; User Equipment radio transmission and reception,” 3rd Generation Partnership Project (3GPP), Tech. Rep. ETSI TS 36.101, 2018
2018
-
[24]
HybridBuildings Propagation Loss Model,
ns-3 Project, “HybridBuildings Propagation Loss Model,” https://www. nsnam.org, ns-3 LTE Module Doc
-
[25]
Further Advancements for E-UTRA Physical Layer Aspects,
3GPP, “Further Advancements for E-UTRA Physical Layer Aspects,” 3rd Generation Partnership Project (3GPP), Tech. Rep. TR 36.814, 2010
2010
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.