City-Mesh3R: Simulation-Ready City-Scale 3D Mesh Reconstruction from Multi-View Images
Pith reviewed 2026-06-29 08:03 UTC · model grok-4.3
The pith
A divide-and-conquer pipeline reconstructs watertight city-scale 3D meshes directly from unordered photo collections.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
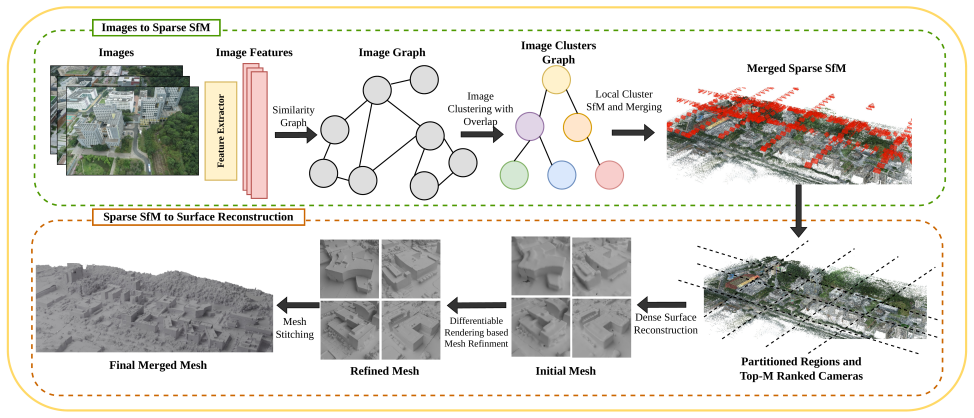
City-Mesh3R reconstructs watertight surface meshes from large unordered image collections by first performing topological image clustering, cluster-wise independent sparse SfM and map merging to build a sparse city map, then spatially partitioning it for geometry-aware camera selection, dense surface reconstruction and curvature-aware adaptive vertex density remeshing, and finally stitching the partition meshes to produce the global mesh.
What carries the argument
The divide-and-conquer pipeline of topological image clustering for sparse SfM, spatial partitioning for dense reconstruction, curvature-aware remeshing, and partition stitching.
If this is right
- Reconstruction becomes feasible for arbitrarily large urban scenes through distributed local processing.
- The output meshes exhibit regular geometry and fine surface details suitable for 3D simulation.
- The pipeline avoids exhaustive global feature matching while still recovering complete geometry.
- It produces simulation-ready meshes unlike incomplete or noisy results from radiance-field methods.
Where Pith is reading between the lines
- The local-to-global consistency pattern might apply to other distributed geometry tasks such as large terrain modeling.
- Incremental updates to clusters could enable dynamic city reconstruction if the merging step supports it.
- Success at city scale would suggest that careful boundary handling in stitching can substitute for full global optimization.
Load-bearing premise
Independent local SfM maps and partitioned dense meshes can be merged and stitched to produce globally consistent geometry without seams, holes, or topological errors at city scale.
What would settle it
Visual or geometric inspection of the stitched output on a city-scale dataset showing discontinuities, holes, or topology errors at partition boundaries would disprove global consistency.
Figures




read the original abstract
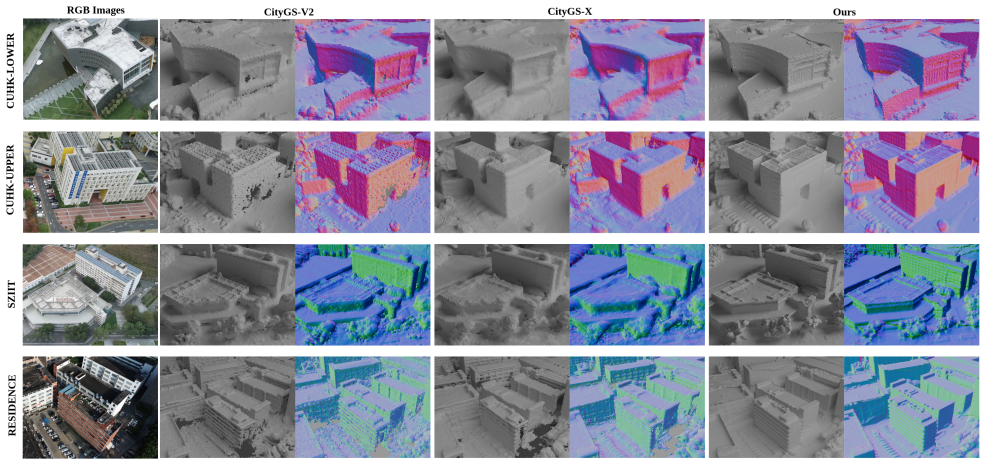
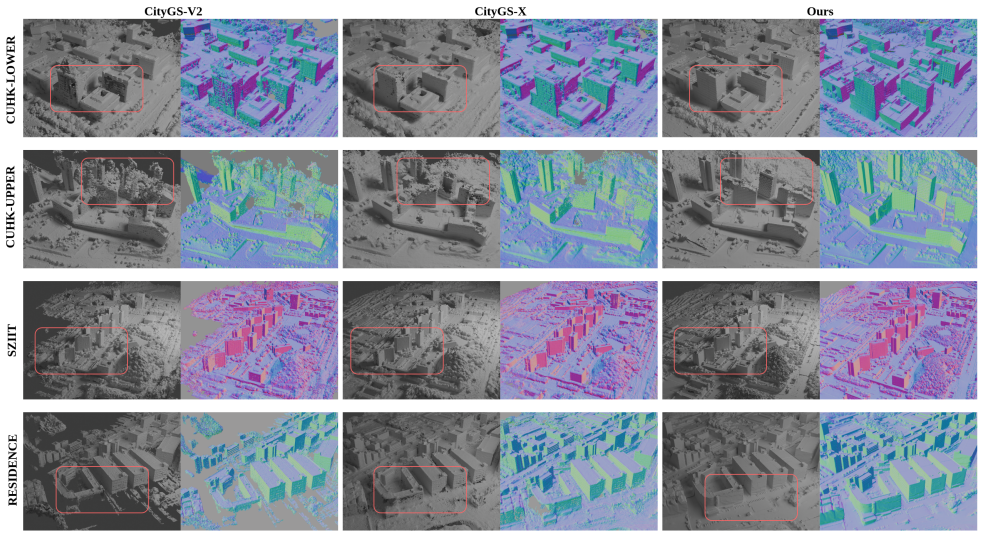
City-scale 3D surface reconstruction from multiview images for downstream 3D simulation, poses highly challenging problems due to the scale and complexity of urban scenes. Existing city-scale 3D reconstruction methods based on NeRF, Gaussian Splatting etc. often fail to recover 3D meshes ready for simulation due to incomplete/missing geometry and irregular, noisy surfaces. Scaling existing small-scale 3D reconstruction methods to arbitrarily large urban scenes is highly infeasible due to their computational complexity. We present City-Mesh3R, a scalable framework for reconstructing watertight surface meshes directly from large unordered image collections. Unlike recent methods which use global sparse SfM point-cloud initialization followed by a distributed 3D dense reconstruction of large-scale scenes, our method follows an end-to-end images-to-mesh 3D reconstruction approach using a divide-and-conquer strategy. The sparse city map is reconstructed via topological image clustering, cluster-wise independent sparse SfM and map merging, without need for exhaustive image feature matching. Then this map is partitioned spatially to perform geometry-aware camera selection, followed by dense surface reconstruction and surface refinement using curvature-aware adaptive vertex density remeshing. These partition meshes are then stitched together to produce the global mesh of the city. The proposed end-to-end framework is evaluated on city-scale reconstruction datasets. As demonstrated by our qualitative and quantitative results, our proposed method yields high-fidelity watertight 3D meshes with regular geometry, capturing fine surface details, and is suitable for scaling to arbitrarily large scenes owing to the end-to-end processing in a distributed setting.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces City-Mesh3R, a divide-and-conquer pipeline for city-scale 3D mesh reconstruction from unordered multi-view images. It performs topological image clustering followed by independent per-cluster SfM and map merging, then spatially partitions the map for per-partition dense reconstruction, curvature-aware remeshing, and final stitching to produce a single watertight simulation-ready mesh. The abstract asserts that this yields high-fidelity meshes with regular geometry and scales to arbitrarily large scenes, supported by qualitative and quantitative results on city-scale datasets.
Significance. If the stitching and merging stages can be shown to enforce global consistency, the method would address a practical gap between existing NeRF/GS approaches (which rarely output simulation-ready meshes) and small-scale mesh pipelines (which do not scale). The end-to-end distributed design and curvature-aware remeshing are potentially useful contributions for urban simulation applications.
major comments (2)
- [Abstract] Abstract: The central claim that the pipeline 'yields high-fidelity watertight 3D meshes ... suitable for scaling to arbitrarily large scenes' depends on the map-merging and partition-stitching stages producing globally consistent geometry without seams, holes, or topological errors. No mechanism for boundary alignment, drift correction, or seam removal is described, and no quantitative metrics, error bars, ablation studies, or dataset details are supplied to support this.
- [Abstract] The abstract states that results are demonstrated by 'qualitative and quantitative results,' yet supplies none of the latter (no tables of accuracy, completeness, or runtime metrics; no comparison to baselines). This absence is load-bearing for the scalability and fidelity assertions.
Simulated Author's Rebuttal
We thank the referee for their detailed review and constructive criticism. We address each major comment point by point below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that the pipeline 'yields high-fidelity watertight 3D meshes ... suitable for scaling to arbitrarily large scenes' depends on the map-merging and partition-stitching stages producing globally consistent geometry without seams, holes, or topological errors. No mechanism for boundary alignment, drift correction, or seam removal is described, and no quantitative metrics, error bars, ablation studies, or dataset details are supplied to support this.
Authors: The referee correctly notes that the abstract provides no description of mechanisms for boundary alignment, drift correction, or seam removal. The manuscript body describes the topological clustering, independent SfM per cluster, map merging, spatial partitioning, and final stitching, but we acknowledge that explicit details on consistency enforcement across boundaries are not sufficiently elaborated to support the central claim. We will revise the manuscript to add a dedicated subsection on boundary handling and consistency in the method, along with quantitative seam-error metrics in the experiments. revision: yes
-
Referee: [Abstract] The abstract states that results are demonstrated by 'qualitative and quantitative results,' yet supplies none of the latter (no tables of accuracy, completeness, or runtime metrics; no comparison to baselines). This absence is load-bearing for the scalability and fidelity assertions.
Authors: The abstract references both qualitative and quantitative results, with the latter appearing in the experimental section of the manuscript. However, the referee is right that the abstract itself contains no supporting numbers, tables, or baseline comparisons, which weakens the scalability and fidelity claims as presented. We will revise the abstract to either remove the unqualified reference to quantitative results or include a concise statement of key metrics and comparisons. revision: partial
Circularity Check
No circularity: standard pipeline steps with no fitted predictions or self-definitional reductions
full rationale
The paper describes a divide-and-conquer pipeline consisting of topological image clustering, cluster-wise SfM with map merging, spatial partitioning, geometry-aware camera selection, dense reconstruction, curvature-aware remeshing, and final stitching. No equations, fitted parameters, or predictions are presented that reduce by construction to inputs. No self-citations are invoked as load-bearing uniqueness theorems or ansatzes. The claims rest on the described sequence of established vision operations evaluated on external datasets, rendering the derivation self-contained.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Standard Structure-from-Motion assumptions hold when applied independently to image clusters at city scale.
Reference graph
Works this paper leans on
-
[1]
Building rome in a day.Communications of the ACM, 54 (10):105–112, 2011
Sameer Agarwal, Yasutaka Furukawa, Noah Snavely, Ian Si- mon, Brian Curless, Steven M Seitz, and Richard Szeliski. Building rome in a day.Communications of the ACM, 54 (10):105–112, 2011. 2
2011
-
[2]
Building rome in a day
Sameer Agarwal, Yasutaka Furukawa, Noah Snavely, et al. Building rome in a day. InICCV, 2011. 2
2011
-
[3]
Netvlad: Cnn architecture for weakly supervised place recognition, 2016
Relja Arandjelovi ´c, Petr Gronat, Akihiko Torii, Tomas Pa- jdla, and Josef Sivic. Netvlad: Cnn architecture for weakly supervised place recognition, 2016. 3
2016
-
[4]
Barron, Ben Mildenhall, Dor Verbin, Pratul P
Jonathan T. Barron, Ben Mildenhall, Dor Verbin, Pratul P. Srinivasan, and Peter Hedman. Mip-nerf 360: Unbounded anti-aliased neural radiance fields.CVPR, 2022. 8
2022
-
[5]
Kanishk Chaturvedi and Thomas Kolbe. Integrating dynamic data and sensors with semantic 3d city models in the con- text of smart cities.ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, IV-2/W1: 31–38, 2016. 1
2016
-
[6]
Pgsr: Planar-based gaussian splatting for ef- ficient and high-fidelity surface reconstruction.IEEE Trans- actions on Visualization and Computer Graphics, 2024
Danpeng Chen, Hai Li, Weicai Ye, Yifan Wang, Weijian Xie, Shangjin Zhai, Nan Wang, Haomin Liu, Hujun Bao, and Guofeng Zhang. Pgsr: Planar-based gaussian splatting for ef- ficient and high-fidelity surface reconstruction.IEEE Trans- actions on Visualization and Computer Graphics, 2024. 3
2024
-
[7]
Gigags: 3d gaussian based planar representation for large-scene surface reconstruction
Junyi Chen, Weicai Ye, Yifan Wang, Danpeng Chen, Di Huang, Wanli Ouyang, Guofeng Zhang, Yu Qiao, and Tong He. Gigags: 3d gaussian based planar representation for large-scene surface reconstruction. InProceedings of the AAAI Conference on Artificial Intelligence, pages 2088– 2096, 2025. 3
2088
-
[8]
Dogs: Distributed-oriented gaus- sian splatting for large-scale 3d reconstruction via gaussian consensus.Advances in Neural Information Processing Sys- tems, 37:34487–34512, 2024
Yu Chen and Gim Hee Lee. Dogs: Distributed-oriented gaus- sian splatting for large-scale 3d reconstruction via gaussian consensus.Advances in Neural Information Processing Sys- tems, 37:34487–34512, 2024. 3
2024
-
[9]
Graph-based parallel large scale structure from motion,
Yu Chen, Shuhan Shen, Yisong Chen, and Guoping Wang. Graph-based parallel large scale structure from motion,
-
[10]
Andreas Christodoulides, Gary K. L. Tam, James Clarke, Richard Smith, Jon Horgan, Nicholas Micallef, Jeremy Mor- ley, Nelly Villamizar, and Sean Walton. Survey on 3d recon- struction techniques: Large-scale urban city reconstruction and requirements.IEEE Transactions on Visualization and Computer Graphics, 31(10):9343–9367, 2025. 1
2025
-
[11]
Mast3r- sfm: a fully-integrated solution for unconstrained structure- from-motion, 2024
Bardienus Duisterhof, Lojze Zust, Philippe Weinzaepfel, Vincent Leroy, Yohann Cabon, and Jerome Revaud. Mast3r- sfm: a fully-integrated solution for unconstrained structure- from-motion, 2024. 5
2024
-
[12]
Yuanyuan Gao, Hao Li, Jiaqi Chen, Zhengyu Zou, Zhihang Zhong, Dingwen Zhang, Xiao Sun, and Junwei Han. Citygs- x: A scalable architecture for efficient and geometrically accurate large-scale scene reconstruction.arXiv preprint arXiv:2503.23044, 2025. 1, 3, 6, 7
-
[13]
Surfacesplat: Connecting surface recon- struction and gaussian splatting
Zihui Gao, Jia-Wang Bian, Guosheng Lin, Hao Chen, and Chunhua Shen. Surfacesplat: Connecting surface recon- struction and gaussian splatting. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 28525–28534, 2025. 3
2025
-
[14]
Sugar: Surface- aligned gaussian splatting for efficient 3d mesh reconstruc- tion and high-quality mesh rendering
Antoine Gu ´edon and Vincent Lepetit. Sugar: Surface- aligned gaussian splatting for efficient 3d mesh reconstruc- tion and high-quality mesh rendering. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 5354–5363, 2024. 3
2024
-
[15]
Milo: Mesh- in-the-loop gaussian splatting for detailed and efficient sur- face reconstruction.ACM Transactions on Graphics (TOG), 44(6):1–15, 2025
Antoine Gu ´edon, Diego Gomez, Nissim Maruani, Bingchen Gong, George Drettakis, and Maks Ovsjanikov. Milo: Mesh- in-the-loop gaussian splatting for detailed and efficient sur- face reconstruction.ACM Transactions on Graphics (TOG), 44(6):1–15, 2025. 3, 7, 8
2025
-
[16]
Lin, Marc Van Droogenbroeck, and Andrea Tagliasac- chi
Jan Held, Sanghyun Son, Renaud Vandeghen, Daniel Re- bain, Matheus Gadelha, Yi Zhou, Anthony Cioppa, Ming C. Lin, Marc Van Droogenbroeck, and Andrea Tagliasac- chi. Meshsplatting: Differentiable rendering with opaque meshes.arXiv, 2025. 3, 7, 8
2025
-
[17]
2d gaussian splatting for geometrically ac- curate radiance fields
Binbin Huang, Zehao Yu, Anpei Chen, Andreas Geiger, and Shenghua Gao. 2d gaussian splatting for geometrically ac- curate radiance fields. InACM SIGGRAPH 2024 conference papers, pages 1–11, 2024. 3
2024
-
[18]
Robust image retrieval-based visual localization using kapture, 2022
Martin Humenberger, Yohann Cabon, Nicolas Guerin, Julien Morat, Vincent Leroy, J´erˆome Revaud, Philippe Rerole, No´e Pion, Cesar de Souza, and Gabriela Csurka. Robust image retrieval-based visual localization using kapture, 2022. 3
2022
-
[19]
Ex- ploring the 15-minutes city concept: Global challenges and opportunities in diverse urban contexts.Urban Science, 9(7): 252, 2025
Asifa Iqbal, Humaira Nazir, and Ammad Waheed Qazi. Ex- ploring the 15-minutes city concept: Global challenges and opportunities in diverse urban contexts.Urban Science, 9(7): 252, 2025. 2
2025
-
[20]
Horizon- gs: Unified 3d gaussian splatting for large-scale aerial-to- ground scenes
Lihan Jiang, Kerui Ren, Mulin Yu, Linning Xu, Junting Dong, Tao Lu, Feng Zhao, Dahua Lin, and Bo Dai. Horizon- gs: Unified 3d gaussian splatting for large-scale aerial-to- ground scenes. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 26789–26799, 2025. 3
2025
-
[21]
A hierarchical 3d gaussian representation for real-time ren- dering of very large datasets.ACM Transactions on Graphics (TOG), 43(4):1–15, 2024
Bernhard Kerbl, Andreas Meuleman, Georgios Kopanas, Michael Wimmer, Alexandre Lanvin, and George Drettakis. A hierarchical 3d gaussian representation for real-time ren- dering of very large datasets.ACM Transactions on Graphics (TOG), 43(4):1–15, 2024. 3
2024
-
[22]
Ground- ing image matching in 3d with mast3r, 2024
Vincent Leroy, Yohann Cabon, and J´erˆome Revaud. Ground- ing image matching in 3d with mast3r, 2024. 4, 5
2024
-
[23]
arXiv preprint arXiv:2509.18090 (2025)
Jiahe Li, Jiawei Zhang, Youmin Zhang, Xiao Bai, Jin Zheng, Xiaohan Yu, and Lin Gu. Geosvr: Taming sparse vox- els for geometrically accurate surface reconstruction.arXiv preprint arXiv:2509.18090, 2025. 3
-
[24]
Vastgaussian: Vast 3d gaussians for large scene reconstruction
Jiaqi Lin, Zhihao Li, Xiao Tang, Jianzhuang Liu, Shiyong Liu, Jiayue Liu, Yangdi Lu, Xiaofei Wu, Songcen Xu, You- liang Yan, et al. Vastgaussian: Vast 3d gaussians for large scene reconstruction. InProceedings of the IEEE/CVF Con- ference on Computer Vision and Pattern Recognition, pages 5166–5175, 2024. 2, 3
2024
-
[25]
Capturing, reconstructing, and simulating: the urbanscene3d dataset, 2022
Liqiang Lin, Yilin Liu, Yue Hu, Xingguang Yan, Ke Xie, and Hui Huang. Capturing, reconstructing, and simulating: the urbanscene3d dataset, 2022. 6, 7
2022
-
[26]
Citygaussian: Real-time high-quality large-scale scene rendering with gaussians
Yang Liu, Chuanchen Luo, Lue Fan, Naiyan Wang, Jun- ran Peng, and Zhaoxiang Zhang. Citygaussian: Real-time high-quality large-scale scene rendering with gaussians. In European Conference on Computer Vision, pages 265–282. Springer, 2024. 2, 3
2024
-
[27]
Yang Liu, Chuanchen Luo, Zhongkai Mao, Junran Peng, and Zhaoxiang Zhang. Citygaussianv2: Efficient and geometri- cally accurate reconstruction for large-scale scenes.arXiv preprint arXiv:2411.00771, 2024. 1, 2, 3, 6, 7
-
[28]
3dgsr: Implicit surface reconstruction with 3d gaussian splat- ting.ACM Transactions on Graphics (TOG), 43(6):1–12,
Xiaoyang Lyu, Yang-Tian Sun, Yi-Hua Huang, Xiuzhe Wu, Ziyi Yang, Yilun Chen, Jiangmiao Pang, and Xiaojuan Qi. 3dgsr: Implicit surface reconstruction with 3d gaussian splat- ting.ACM Transactions on Graphics (TOG), 43(6):1–12,
-
[29]
Alexander Mai, Trevor Hedstrom, George Kopanas, Janne Kontkanen, Falko Kuester, and Jonathan T. Barron. Radiance meshes for volumetric reconstruction, 2025. 3, 7, 8
2025
-
[30]
Dinov2: Learning robust visual features with- out supervision, 2024
Maxime Oquab, Timoth ´ee Darcet, Th ´eo Moutakanni, Huy V o, Marc Szafraniec, Vasil Khalidov, Pierre Fernandez, Daniel Haziza, Francisco Massa, Alaaeldin El-Nouby, Mah- moud Assran, Nicolas Ballas, Wojciech Galuba, Russell Howes, Po-Yao Huang, Shang-Wen Li, Ishan Misra, Michael Rabbat, Vasu Sharma, Gabriel Synnaeve, Hu Xu, Herv ´e Je- gou, Julien Mairal, ...
2024
-
[31]
Revisiting patchmatch multi-view stereo for urban 3d reconstruction
Marco Orsingher, Paolo Zani, Paolo Medici, and Massimo Bertozzi. Revisiting patchmatch multi-view stereo for urban 3d reconstruction. In2022 IEEE Intelligent Vehicles Sympo- sium (IV), pages 190–196. IEEE, 2022. 2
2022
-
[32]
Continuous remeshing for inverse render- ing.Computer Animation and Virtual Worlds, 33(5):e2101,
Werner Palfinger. Continuous remeshing for inverse render- ing.Computer Animation and Virtual Worlds, 33(5):e2101,
-
[33]
Global Structure-from-Motion Revisited
Linfei Pan, Daniel Barath, Marc Pollefeys, and Jo- hannes Lutz Sch ¨onberger. Global Structure-from-Motion Revisited. InEuropean Conference on Computer Vision (ECCV), 2024. 2
2024
-
[34]
Pedregosa, G
F. Pedregosa, G. Varoquaux, A. Gramfort, V . Michel, B. Thirion, O. Grisel, M. Blondel, P. Prettenhofer, R. Weiss, V . Dubourg, J. Vanderplas, A. Passos, D. Cournapeau, M. Brucher, M. Perrot, and E. Duchesnay. Scikit-learn: Machine learning in Python.Journal of Machine Learning Research, 12:2825–2830, 2011. 3, 7
2011
-
[35]
Learning with average preci- sion: Training image retrieval with a listwise loss, 2019
Jerome Revaud, Jon Almazan, Rafael Sampaio de Rezende, and Cesar Roberto de Souza. Learning with average preci- sion: Training image retrieval with a listwise loss, 2019. 3
2019
-
[36]
From coarse to fine: Robust hierarchical localization at large scale, 2019
Paul-Edouard Sarlin, Cesar Cadena, Roland Siegwart, and Marcin Dymczyk. From coarse to fine: Robust hierarchical localization at large scale, 2019. 3
2019
-
[37]
Sch ¨onberger and Jan-Michael Frahm
Johannes L. Sch ¨onberger and Jan-Michael Frahm. Structure- from-motion revisited. InCVPR, 2016. 2, 4
2016
-
[38]
Sparse voxels rasterization: Real- time high-fidelity radiance field rendering
Cheng Sun, Jaesung Choe, Charles Loop, Wei-Chiu Ma, and Yu-Chiang Frank Wang. Sparse voxels rasterization: Real- time high-fidelity radiance field rendering. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 16187–16196, 2025. 3
2025
-
[39]
Block-nerf: Scalable large scene neural view synthesis
Matthew Tancik, Vincent Casser, Xinchen Yan, Sabeek Prad- han, Ben Mildenhall, Pratul P Srinivasan, Jonathan T Barron, and Henrik Kretzschmar. Block-nerf: Scalable large scene neural view synthesis. InProceedings of the IEEE/CVF con- ference on computer vision and pattern recognition, pages 8248–8258, 2022. 2, 3
2022
-
[40]
Mega-nerf: Scalable construction of large- scale nerfs for virtual fly-throughs
Haithem Turki, Deva Ramanan, and Mahadev Satya- narayanan. Mega-nerf: Scalable construction of large- scale nerfs for virtual fly-throughs. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 12922–12931, 2022. 2, 3
2022
-
[41]
Moge: Unlocking accurate monocular geometry estimation for open-domain images with optimal training supervision, 2025
Ruicheng Wang, Sicheng Xu, Cassie Dai, Jianfeng Xiang, Yu Deng, Xin Tong, and Jiaolong Yang. Moge: Unlocking accurate monocular geometry estimation for open-domain images with optimal training supervision, 2025. 5
2025
-
[42]
Jierui Xie and Boleslaw K Szymanski. Slpa: Uncov- ering overlapping communities in social networks via a speaker-listener interaction dynamic process.arXiv preprint arXiv:1109.5720, 2011. 3
work page internal anchor Pith review Pith/arXiv arXiv 2011
-
[43]
arXiv preprint arXiv:2401.14032 (2024)
Butian Xiong, Zhuo Li, and Zhen Li. Gauu-scene: A scene reconstruction benchmark on large scale 3d recon- struction dataset using gaussian splatting.arXiv preprint arXiv:2401.14032, 2024. 7, 8
-
[44]
Gauu-scene: A scene reconstruction benchmark on large scale 3d reconstruction dataset using gaussian splatting, 2024
Butian Xiong, Zhuo Li, and Zhen Li. Gauu-scene: A scene reconstruction benchmark on large scale 3d reconstruction dataset using gaussian splatting, 2024. 1, 6
2024
-
[45]
Butian Xiong, Xiaoyu Ye, Tze Ho Elden Tse, Kai Han, Shuguang Cui, and Zhen Li. Sa-gs: Semantic-aware gaus- sian splatting for large scene reconstruction with geometry constrain.arXiv preprint arXiv:2405.16923, 2024. 3
-
[46]
Scalable and high-quality neural implicit representation for 3d recon- struction.IEEE Transactions on Visualization and Computer Graphics, 2025
Leyuan Yang, Bailin Deng, and Juyong Zhang. Scalable and high-quality neural implicit representation for 3d recon- struction.IEEE Transactions on Visualization and Computer Graphics, 2025. 3
2025
-
[47]
Gaussian opacity fields: Efficient adaptive surface reconstruction in unbounded scenes.ACM Transactions on Graphics (ToG), 43(6):1–13, 2024
Zehao Yu, Torsten Sattler, and Andreas Geiger. Gaussian opacity fields: Efficient adaptive surface reconstruction in unbounded scenes.ACM Transactions on Graphics (ToG), 43(6):1–13, 2024. 3
2024
-
[48]
Supernerf: High-precision 3d reconstruction for large-scale scenes.IEEE Transactions on Geoscience and Remote Sens- ing, 2024
Guangyun Zhang, Chaozhong Xue, and Rongting Zhang. Supernerf: High-precision 3d reconstruction for large-scale scenes.IEEE Transactions on Geoscience and Remote Sens- ing, 2024. 2, 3
2024
-
[49]
Very large-scale global sfm by distributed motion averaging
Siyu Zhu, Runze Zhang, Lei Zhou, Tianwei Shen, Tian Fang, Ping Tan, and Long Quan. Very large-scale global sfm by distributed motion averaging. InProceedings of the IEEE conference on computer vision and pattern recogni- tion, pages 4568–4577, 2018. 2 City-Mesh3R: Simulation-Ready City-Scale 3D Mesh Reconstruction from Multi-View Images Supplementary Mate...
2018
-
[50]
Support-plane parameterization and regular partition construction This subsection provides the implementation details omit- ted from the main paper (Sec
Area partitioning of large-scale sparse SfM 6.1. Support-plane parameterization and regular partition construction This subsection provides the implementation details omit- ted from the main paper (Sec. 3.2) for constructing the spa- tial partitions used before camera selection. Dominant-support-plane parameterization.LetP= {Pp}denote the sparse 3D points...
-
[51]
For each partitioned area, we start from its sparse SfM reconstruction and retain the top-Mcameras from the rank- ing stage
Dense Reconstruction and Surface Initial- ization This section provides the detailed formulation for the dense reconstruction and surface initialization module summa- rized in Section 3.2. For each partitioned area, we start from its sparse SfM reconstruction and retain the top-Mcameras from the rank- ing stage. Their intrinsics and poses,{K n, Rn, tn}M n...
-
[52]
Differentiable Rendering based Mesh Re- finement This section provides the full formulation and implementa- tion details omitted from Sec. 3.2. 8.1. Rendering Objective At iterationk, the current mesh isM k = (V k, F k). Given calibrated cameras{K j, Twc,j }N j=1, we optimize Φ(M k) = NX j=1 λn L(j) n (M k) +λ s L(j) sil (M k) +R(M k), (34) whereRis a lig...
-
[53]
Mesh Quality Metrics We assess mesh quality using the following metrics, which quantify complementary aspects of geometric validity, topological consistency, and structural regularity. Aspect Ratio (AR).For a triangular facef∈ F, leth f denote its longest edge length andr f its inradius. The face- wise aspect ratio is defined as AR(f) = hf 2rf ,(51) Metri...
-
[54]
Limitations Although our pipeline is highly scalable and produces clean, simulation-ready meshes, a few practical constraints re- main. Our method inherits any residual errors from up- stream SfM or pretrained depth prediction models, and ex- tremely texture-poor or reflective regions can still challenge local reconstruction quality. Seam merging is robus...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.