Learning Terrain-Aware Whole-Body Control for Perceptive Legged Loco-Manipulation
Pith reviewed 2026-06-28 22:38 UTC · model grok-4.3
The pith
A terrain-aware whole-body controller lets legged manipulators coordinate legs and arms while adapting posture and footholds to rough terrain.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
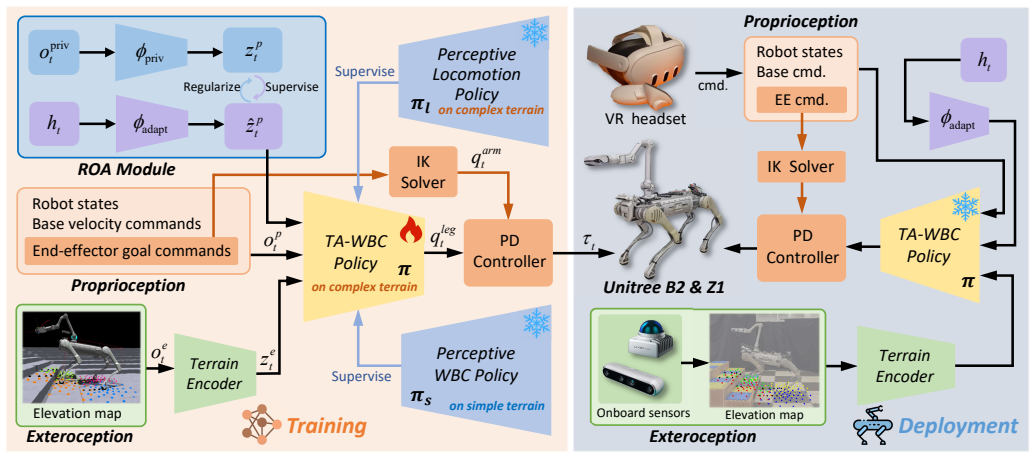
The authors claim that their terrain-aware whole-body control framework, built around a unified RL policy with a hybrid exteroception encoder, foot-contact-plane end-effector sampling, and dual-policy distillation, enables legged manipulators to perform loco-manipulation tasks across various terrains with improved robustness, evidenced by expanded reachable space, lower tracking error, and fewer unexpected stumbles in both simulation and real-world tests.
What carries the argument
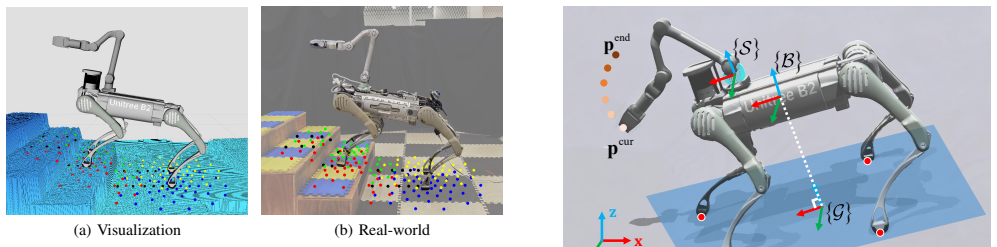
The hybrid exteroception encoder that extracts terrain features to guide proactive adaptation of posture and footholds, together with the end-effector sampling method based on the foot contact plane that decouples manipulation targets from base motion.
If this is right
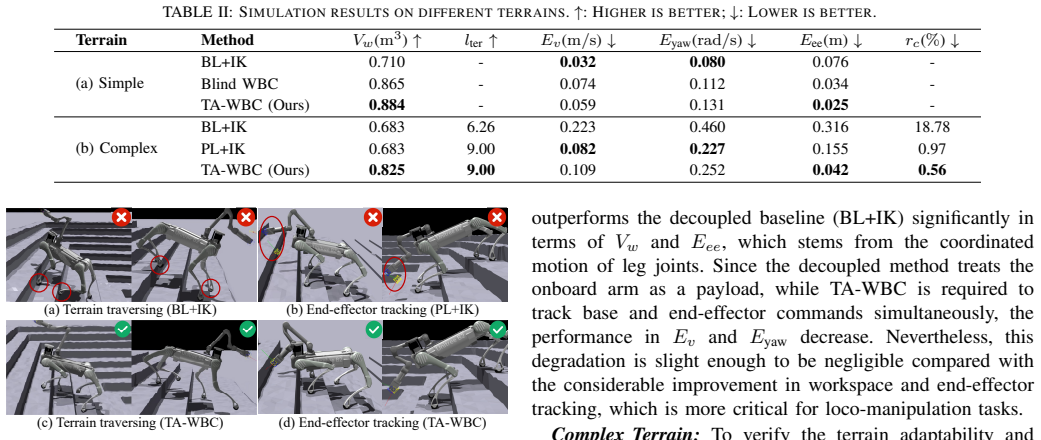
- The robot gains a larger set of reachable manipulation targets without causing base instability.
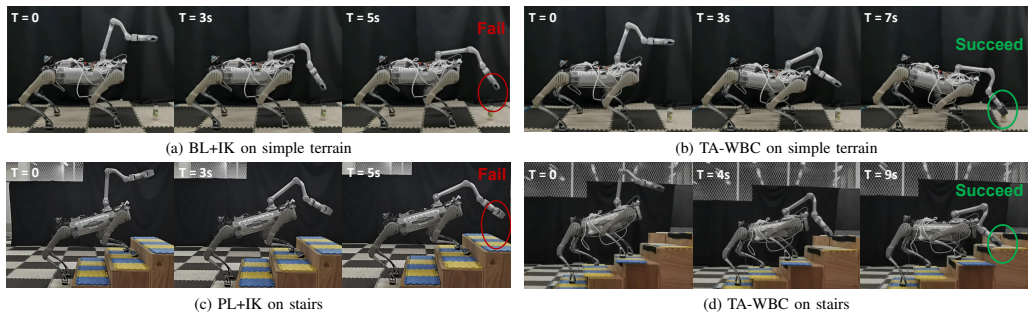
- End-effector tracking error decreases when the base moves across changing terrain.
- Unexpected stumbles drop during simultaneous locomotion and arm motion.
- The unified policy retains terrain adaptation while learning new manipulation behaviors.
Where Pith is reading between the lines
- The same encoder-plus-sampling pattern could be tested on other multi-limb platforms that must balance and reach at the same time.
- Adding an explicit uncertainty estimate from the terrain encoder might further reduce falls when sensor data is noisy.
- The foot-plane sampling idea could be combined with online footstep planning to handle moving obstacles.
Load-bearing premise
The hybrid exteroception encoder extracts terrain features that provide an essential basis for the robot to proactively adapt posture and footholds.
What would settle it
A direct comparison on sloped or uneven terrain where the terrain-aware policy produces the same reachable workspace size, tracking error, or stumble rate as a proprioception-only baseline would falsify the robustness claim.
Figures

read the original abstract
Legged manipulators integrate exceptional terrain adaptability along with mobile manipulation capabilities, which make them highly promising for deployment in human-centric environments. By coordinating the control of both legs and arms, a whole-body controller can significantly expand the operational workspace of legged manipulators. However, many existing whole-body controllers primarily depend on proprioception and do not incorporate the critical exteroception required for effective terrain topology perception. This limitation can hinder their ability to adapt to varying environmental conditions and navigate complex terrains effectively. In this paper, we introduce TA-WBC, a terrain-aware whole-body control framework for legged manipulators, which features a novel RL-based unified policy tailored to whole-body loco-manipulation tasks in various terrains. Specifically, we employ a hybrid exteroception encoder to extract terrain features, providing an essential basis for the robot to proactively adapt posture and footholds. Furthermore, to facilitate stable cross-terrain loco-manipulation, we propose a novel end-effector sampling method based on the foot contact plane, decoupling manipulation target from base fluctuations. Moreover, a dual-policy distillation module is introduced to integrate expansive whole-body motion with terrain adaptability without catastrophic forgetting. The simulation and real-world experiments validate the robustness of our proposed controller, which leads to a larger reachable space, less tracking error, and reduced unexpected stumbles. This unified policy highlights the promising capabilities of legged manipulators in performing loco-manipulation tasks across complex terrains.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes TA-WBC, a terrain-aware whole-body control framework for legged manipulators. It uses an RL-based unified policy for loco-manipulation tasks, a hybrid exteroception encoder to extract terrain features for proactive posture and foothold adaptation, an end-effector sampling method based on the foot contact plane to decouple manipulation targets from base motion, and a dual-policy distillation module to combine whole-body motion with terrain adaptability. The authors claim that simulation and real-world experiments show the controller achieves a larger reachable space, lower tracking error, and fewer unexpected stumbles across complex terrains.
Significance. If the performance claims hold under rigorous evaluation, the work would advance perceptive legged loco-manipulation by demonstrating how exteroceptive terrain awareness can be integrated into whole-body RL policies without catastrophic forgetting. The hybrid encoder, contact-plane sampling, and distillation approach address a relevant gap between proprioception-only controllers and terrain-adaptive manipulation.
major comments (2)
- [Abstract] Abstract (paragraph on TA-WBC components): The central claim that the hybrid exteroception encoder 'provides an essential basis' for proactive adaptation of posture and footholds is load-bearing for attributing performance gains to terrain awareness. No ablation is described that disables or replaces the encoder while holding the RL policy, sampling method, and distillation fixed; all reported results are for the full system only. This prevents isolating the encoder's contribution from other modules.
- [Abstract] Abstract (validation sentence): The assertion that 'simulation and real-world experiments validate the robustness' is unsupported by any reported quantitative metrics, baselines, ablation studies, or error bars. Without these, the claims of larger reachable space, less tracking error, and reduced stumbles cannot be assessed for effect size or statistical reliability.
minor comments (1)
- [Abstract] The abstract would be strengthened by a single sentence summarizing the key quantitative improvements (e.g., percentage reduction in tracking error or stumble rate) rather than qualitative statements alone.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on clarifying component contributions and strengthening empirical claims in the abstract. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract (paragraph on TA-WBC components): The central claim that the hybrid exteroception encoder 'provides an essential basis' for proactive adaptation of posture and footholds is load-bearing for attributing performance gains to terrain awareness. No ablation is described that disables or replaces the encoder while holding the RL policy, sampling method, and distillation fixed; all reported results are for the full system only. This prevents isolating the encoder's contribution from other modules.
Authors: We agree that a controlled ablation isolating the hybrid exteroception encoder—by disabling or replacing it while holding the RL policy, contact-plane sampling, and distillation fixed—would more directly attribute performance gains to terrain awareness. Our existing evaluations compare the full system to proprioception-only baselines, but we will add the requested ablation study in the revised manuscript to address this gap. revision: yes
-
Referee: [Abstract] Abstract (validation sentence): The assertion that 'simulation and real-world experiments validate the robustness' is unsupported by any reported quantitative metrics, baselines, ablation studies, or error bars. Without these, the claims of larger reachable space, less tracking error, and reduced stumbles cannot be assessed for effect size or statistical reliability.
Authors: The abstract provides a high-level summary of the results. Detailed quantitative metrics (reachable workspace volumes, tracking errors, stumble counts), baseline comparisons, module ablations, and error bars from repeated trials are reported in Section 5 (Experiments) and the supplementary material. We will revise the abstract to include key numerical improvements or explicit references to these supporting results. revision: partial
Circularity Check
No circularity; empirical RL validation is self-contained
full rationale
The paper describes an RL policy for terrain-aware whole-body loco-manipulation using a hybrid exteroception encoder, foot-contact-plane sampling, and dual-policy distillation. All performance claims (larger reachable space, lower tracking error, fewer stumbles) are presented as outcomes of simulation and real-world experiments on trained policies evaluated on held-out terrains. No equations, first-principles derivations, or predictions appear in the provided text that reduce by construction to fitted parameters or self-citations. The method components are introduced as design choices whose contributions are assessed empirically rather than defined in terms of the target metrics. This is the normal case of an engineering RL paper whose results rest on external benchmarks rather than tautological re-labeling of inputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation
Z. Fu, T. Z. Zhao, and C. Finn, “Mobile aloha: Learning bimanual mobile manipulation with low-cost whole-body teleoperation,”arXiv preprint arXiv:2401.02117, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[2]
Synergizing Efficiency and Reliability for Continuous Mobile Manipulation
C. Wu, R. Wang, Y . Zeng, J. Wang, M. Zhang, G. Zheng, Q. Niu, J. Zheng, J. Ma, and B. Zhou, “Synergizing efficiency and reliability for continuous mobile manipulation,”arXiv preprint arXiv:2604.05430, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[3]
Whole-body mpc for a dynamically stable mobile manipulator,
M. V . Minniti, F. Farshidian, R. Grandia, and M. Hutter, “Whole-body mpc for a dynamically stable mobile manipulator,”IEEE Robotics and Automation Letters, vol. 4, no. 4, pp. 3687–3694, 2019
2019
-
[4]
Deep whole-body control: learning a unified policy for manipulation and locomotion,
Z. Fu, X. Cheng, and D. Pathak, “Deep whole-body control: learning a unified policy for manipulation and locomotion,” inConference on Robot Learning. PMLR, 2023, pp. 138–149
2023
-
[5]
Roboduet: Learning a cooperative policy for whole-body legged loco-manipulation,
G. Pan, Q. Ben, Z. Yuan, G. Jiang, Y . Ji, S. Li, J. Pang, H. Liu, and H. Xu, “Roboduet: Learning a cooperative policy for whole-body legged loco-manipulation,”IEEE Robotics and Automation Letters, 2025
2025
-
[6]
Whole-body inverse dynamics mpc for legged loco-manipulation,
L. Molnar, J. Cheng, G. Fadini, D. Kang, F. Zargarbashi, and S. Coros, “Whole-body inverse dynamics mpc for legged loco-manipulation,” IEEE Robotics and Automation Letters, 2025
2025
-
[7]
Hierarchical quadratic programming: Fast online humanoid-robot motion generation,
A. Escande, N. Mansard, and P.-B. Wieber, “Hierarchical quadratic programming: Fast online humanoid-robot motion generation,”The International Journal of Robotics Research, vol. 33, no. 7, pp. 1006– 1028, 2014
2014
-
[8]
Towards a multi-legged mobile manipulator,
B. U. Rehman, M. Focchi, J. Lee, H. Dallali, D. G. Caldwell, and C. Semini, “Towards a multi-legged mobile manipulator,” in2016 IEEE International Conference on Robotics and Automation. IEEE, 2016, pp. 3618–3624
2016
-
[9]
Teacher-student framework: a reinforcement learning approach,
M. Zimmer, P. Viappiani, and P. Weng, “Teacher-student framework: a reinforcement learning approach,” inAAMAS Workshop Autonomous Robots and Multirobot Systems, 2014
2014
-
[10]
Learning to open and traverse doors with a legged manipulator,
M. Zhang, Y . Ma, T. Miki, and M. Hutter, “Learning to open and traverse doors with a legged manipulator,”arXiv preprint arXiv:2409.04882, 2024
-
[11]
Learning whole-body loco-manipulation for omni-directional task space pose tracking with a wheeled-quadrupedal-manipulator,
K. Jiang, Z. Fu, J. Guo, W. Zhang, and H. Chen, “Learning whole-body loco-manipulation for omni-directional task space pose tracking with a wheeled-quadrupedal-manipulator,”IEEE Robotics and Automation Letters, 2024
2024
-
[12]
Vi- sual whole-body control for legged loco-manipulation,
M. Liu, Z. Chen, X. Cheng, Y . Ji, R.-Z. Qiu, R. Yang, and X. Wang, “Vi- sual whole-body control for legged loco-manipulation,”arXiv preprint arXiv:2403.16967, 2024
-
[13]
Pilot: A perceptive integrated low-level controller for loco-manipulation over unstructured scenes,
X. Cui, L. Feng, Y . Zhou, H. Han, Z. Liu, and H. Wang, “Pilot: A perceptive integrated low-level controller for loco-manipulation over unstructured scenes,”arXiv preprint arXiv:2601.17440, 2026
-
[14]
Whole-body end- effector pose tracking,
T. Portela, A. Cramariuc, M. Mittal, and M. Hutter, “Whole-body end- effector pose tracking,” in2025 IEEE International Conference on Robotics and Automation. IEEE, 2025, pp. 11 205–11 211
2025
-
[15]
Optimization-based control for dynamic legged robots,
P. M. Wensing, M. Posa, Y . Hu, A. Escande, N. Mansard, and A. Del Prete, “Optimization-based control for dynamic legged robots,” IEEE Transactions on Robotics, vol. 40, pp. 43–63, 2023
2023
-
[16]
Dynamic locomotion in the mit cheetah 3 through convex model-predictive con- trol,
J. Di Carlo, P. M. Wensing, B. Katz, G. Bledt, and S. Kim, “Dynamic locomotion in the mit cheetah 3 through convex model-predictive con- trol,” in2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2018, pp. 1–9
2018
-
[17]
Walk these ways: Tuning robot control for generalization with multiplicity of behavior,
G. B. Margolis and P. Agrawal, “Walk these ways: Tuning robot control for generalization with multiplicity of behavior,” inConference on Robot Learning. PMLR, 2023, pp. 22–31
2023
-
[18]
Learning to walk in minutes using massively parallel deep reinforcement learning,
N. Rudin, D. Hoeller, P. Reist, and M. Hutter, “Learning to walk in minutes using massively parallel deep reinforcement learning,” in Conference on Robot Learning. PMLR, 2022, pp. 91–100
2022
-
[19]
Dreamwaq: Learning robust quadrupedal locomotion with implicit terrain imagination via deep reinforcement learning,
I. M. A. Nahrendra, B. Yu, and H. Myung, “Dreamwaq: Learning robust quadrupedal locomotion with implicit terrain imagination via deep reinforcement learning,” in2023 IEEE International Conference on Robotics and Automation. IEEE, 2023, pp. 5078–5084
2023
-
[20]
Extreme parkour with legged robots,
X. Cheng, K. Shi, A. Agarwal, and D. Pathak, “Extreme parkour with legged robots,” in2024 IEEE International Conference on Robotics and Automation. IEEE, 2024, pp. 11 443–11 450
2024
-
[21]
Robot parkour learning,
Z. Zhuang, Z. Fu, J. Wang, C. G. Atkeson, S. Schwertfeger, C. Finn, and H. Zhao, “Robot parkour learning,” inConference on Robot Learning. PMLR, 2023, pp. 73–92
2023
-
[22]
Attention-based map encoding for learning generalized legged locomo- tion,
J. He, C. Zhang, F. Jenelten, R. Grandia, M. Bächer, and M. Hutter, “Attention-based map encoding for learning generalized legged locomo- tion,”Science Robotics, vol. 10, no. 105, p. eadv3604, 2025
2025
-
[23]
Vb-com: Learning vision-blind composite humanoid loco- motion against deficient perception,
J. Ren, T. Huang, H. Wang, Z. Wang, Q. Ben, J. Long, Y . Yang, J. Pang, and P. Luo, “Vb-com: Learning vision-blind composite humanoid loco- motion against deficient perception,”arXiv preprint arXiv:2502.14814, 2025
-
[24]
Beamdojo: Learning agile humanoid locomotion on sparse footholds,
H. Wang, Z. Wang, J. Ren, Q. Ben, T. Huang, W. Zhang, and J. Pang, “Beamdojo: Learning agile humanoid locomotion on sparse footholds,” arXiv preprint arXiv:2502.10363, 2025
-
[25]
Go fetch!-dynamic grasps using boston dynamics spot with external robotic arm,
S. Zimmermann, R. Poranne, and S. Coros, “Go fetch!-dynamic grasps using boston dynamics spot with external robotic arm,” in2021 IEEE International Conference on Robotics and Automation. IEEE, 2021, pp. 4488–4494
2021
-
[26]
Bayesian multi-task learning mpc for robotic mobile manipulation,
E. Arcari, M. V . Minniti, A. Scampicchio, A. Carron, F. Farshidian, M. Hutter, and M. N. Zeilinger, “Bayesian multi-task learning mpc for robotic mobile manipulation,”IEEE Robotics and Automation Letters, vol. 8, no. 6, pp. 3222–3229, 2023
2023
-
[27]
A collision-free mpc for whole-body dynamic locomotion and manipula- tion,
J.-R. Chiu, J.-P. Sleiman, M. Mittal, F. Farshidian, and M. Hutter, “A collision-free mpc for whole-body dynamic locomotion and manipula- tion,” in2022 International Conference on Robotics and Automation. IEEE, 2022, pp. 4686–4693
2022
-
[28]
Alma-articulated locomotion and manipu- lation for a torque-controllable robot,
C. D. Bellicoso, K. Krämer, M. Stäuble, D. Sako, F. Jenelten, M. Bjelonic, and M. Hutter, “Alma-articulated locomotion and manipu- lation for a torque-controllable robot,” in2019 International Conference on Robotics and Automation. IEEE, 2019, pp. 8477–8483
2019
-
[29]
Umi-on-legs: Making manipulation policies mobile with manipulation-centric whole-body controllers,
H. Ha, Y . Gao, Z. Fu, J. Tan, and S. Song, “Umi-on-legs: Making manipulation policies mobile with manipulation-centric whole-body controllers,” inConference on Robot Learning. PMLR, 2025, pp. 5254– 5270
2025
-
[30]
Learning a unified policy for position and force control in legged loco-manipulation,
P. Zhi, P. Li, J. Yin, B. Jia, and S. Huang, “Learning a unified policy for position and force control in legged loco-manipulation,” inConference on Robot Learning. PMLR, 2025, pp. 652–669
2025
-
[31]
Learning force control for legged manipulation,
T. Portela, G. B. Margolis, Y . Ji, and P. Agrawal, “Learning force control for legged manipulation,” in2024 IEEE International Conference on Robotics and Automation. IEEE, 2024, pp. 15 366–15 372
2024
-
[32]
Versatile loco-manipulation through flexible interlimb coordination,
X. Zhu, Y . Chen, L. Sun, F. Niroui, S. L. Cleac’h, J. Wang, and K. Fang, “Versatile loco-manipulation through flexible interlimb coordination,” arXiv preprint arXiv:2506.07876, 2025
-
[33]
Interactive navigation for legged manipulators with learned arm-pushing controller,
Z. Bi, K. Chen, C. Zheng, Y . Li, H. Li, and J. Ma, “Interactive navigation for legged manipulators with learned arm-pushing controller,” in2025 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2025, pp. 9–16
2025
-
[34]
Legged locomotion in challenging terrains using egocentric vision,
A. Agarwal, A. Kumar, J. Malik, and D. Pathak, “Legged locomotion in challenging terrains using egocentric vision,” inConference on Robot Learning. PMLR, 2023, pp. 403–415
2023
-
[35]
Learning robust perceptive locomotion for quadrupedal robots in the wild,
T. Miki, J. Lee, J. Hwangbo, L. Wellhausen, V . Koltun, and M. Hutter, “Learning robust perceptive locomotion for quadrupedal robots in the wild,”Science Robotics, vol. 7, no. 62, p. eabk2822, 2022
2022
-
[36]
Transfer- ring dexterous manipulation from gpu simulation to a remote real-world trifinger,
A. Allshire, M. MittaI, V . Lodaya, V . Makoviychuk, D. Makoviichuk, F. Widmaier, M. Wüthrich, S. Bauer, A. Handa, and A. Garg, “Transfer- ring dexterous manipulation from gpu simulation to a remote real-world trifinger,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2022, pp. 11 802–11 809
2022
-
[37]
Elevation mapping for locomotion and navigation using gpu,
T. Miki, L. Wellhausen, R. Grandia, F. Jenelten, T. Homberger, and M. Hutter, “Elevation mapping for locomotion and navigation using gpu,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2022, pp. 2273–2280
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.