BEVIO: Efficient Bird's-Eye-View based Sparse-Update Visual-Inertial Odometry for Lunar Day-Night Navigation
Pith reviewed 2026-06-28 18:37 UTC · model grok-4.3
The pith
BEV-based image matching sustains reliable visual-inertial odometry at visual update rates as low as 0.25 Hz for lunar day-night navigation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that the BEV-based image matching scheme remains robust to larger inter-frame motions and provides more reliable feature matching despite significant visual appearance changes under lunar self-illumination conditions, thereby enabling reliable day and nighttime self-illuminated traverses at visual update rates as low as 0.25 Hz.
What carries the argument
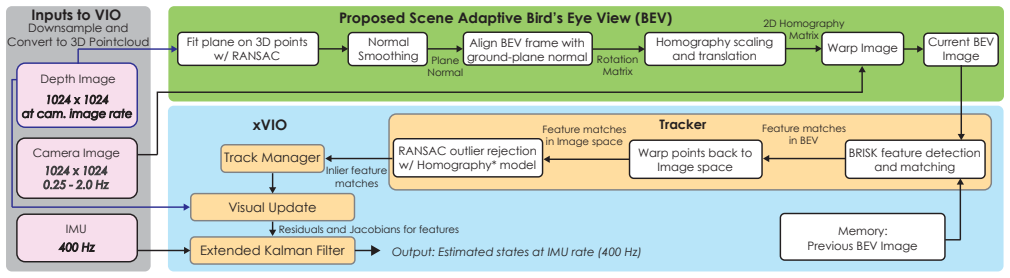
Bird's Eye View (BEV)-based image matching scheme, which converts perspective camera images to an overhead view to stabilize feature associations across frames with large motion or changing illumination.
If this is right
- The system supports day and night navigation on power- and compute-limited lunar rovers.
- It maintains VIO performance with visual updates reduced to 0.25 Hz under self-illumination.
- Evaluations in high-fidelity lunar simulations and real robotic experiments at Plaster City confirm the sparse-update capability.
- Feature associations succeed despite large inter-frame motions and appearance shifts typical of lunar conditions.
Where Pith is reading between the lines
- The same BEV matching could reduce visual demands on rovers operating on other bodies with extreme lighting cycles.
- Lower visual rates might free compute for onboard mapping or planning tasks without sacrificing trajectory accuracy.
- Field tests on actual lunar regolith would reveal whether dust or surface texture further affects the matching reliability.
Load-bearing premise
The BEV-based image matching scheme remains robust to larger inter-frame motions and provides reliable feature matching despite significant visual appearance changes under lunar self-illumination.
What would settle it
Observation of large position drift or tracking failure in a 0.25 Hz self-illuminated night traverse on the half-scale rover or in the photorealistic lunar simulation, relative to performance at higher visual rates.
Figures







read the original abstract
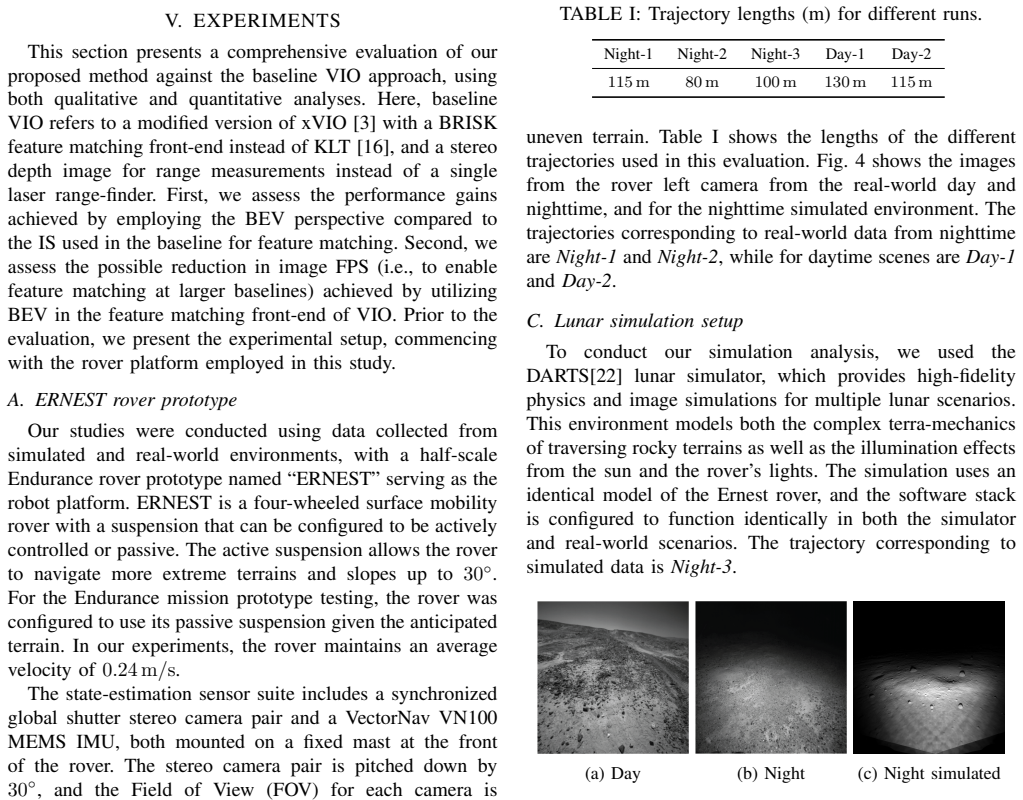
Visual-Inertial Odometry (VIO) provides smooth, high-rate state estimates and has been widely used for robotic navigation in both terrestrial and planetary applications. However, its performance is typically dependent on the frequency of visual updates, which is a challenge for planetary rovers operating under extreme resource constraints and low frame rates. This work investigates enabling reliable VIO with very sparse visual updates for lunar rover applications, addressing both day and night-time operations where feature associations become especially difficult under self-illumination conditions. We propose a Bird's Eye View (BEV)-based image matching scheme that remains robust to larger inter-frame motions and more reliable feature matching despite significant visual appearance changes. We extensively evaluate our proposed approach, BEVIO, through high-fidelity photorealistic lunar and real-time robotic experiments conducted using a half-scale lunar rover, in a long-term day-night deployment at Plaster City, CA, USA. The results demonstrate that our method enables reliable day and nighttime self-illuminated traverses at visual update rates as low as 0.25 Hz, underscoring its suitability for navigation on power- and compute-limited lunar rovers.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes BEVIO, a Bird's-Eye-View based visual-inertial odometry system designed for sparse visual updates (as low as 0.25 Hz) to enable reliable lunar rover navigation in both daytime and self-illuminated nighttime conditions. It claims that the BEV image matching scheme improves robustness to large inter-frame motions and appearance changes due to self-illumination, with supporting evidence from high-fidelity photorealistic lunar simulations and real-robot experiments on a half-scale rover during long-term day-night deployment at Plaster City, CA.
Significance. If the experimental validation holds with quantitative support, the work could meaningfully advance resource-efficient VIO for planetary rovers by demonstrating that visual update rates can be drastically reduced without compromising drift bounds under extreme lighting variations.
major comments (2)
- [Abstract] Abstract: the claim of reliable day/night traverses at 0.25 Hz rests on unevaluated experiments; no quantitative metrics, error bars, baseline comparisons, inlier ratios, or feature-matching failure rates are reported, leaving the central performance assertion unsupported.
- [Experimental Results] Experimental evaluation (implied in abstract and results sections): no per-sequence matching statistics or ablation isolating the BEV component at exactly 0.25 Hz are described, so the load-bearing assumption that BEV projection compensates for geometric scale change, photometric shifts from moving shadows, and uneven terrain remains untested.
minor comments (2)
- [Method] Clarify the exact BEV lifting or homography mechanism and any assumptions about terrain flatness in the method description.
- Add explicit comparison tables against standard VIO baselines (e.g., VINS-Mono, ORB-SLAM) at matched update rates.
Simulated Author's Rebuttal
We thank the referee for the constructive comments highlighting the need for stronger quantitative support. We address each major comment below and will revise the manuscript to incorporate the requested metrics and analyses.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim of reliable day/night traverses at 0.25 Hz rests on unevaluated experiments; no quantitative metrics, error bars, baseline comparisons, inlier ratios, or feature-matching failure rates are reported, leaving the central performance assertion unsupported.
Authors: We agree that the abstract should explicitly include key quantitative results to support the central claims. In the revised version we will update the abstract to report absolute trajectory error (with error bars), baseline comparisons, inlier ratios, and feature-matching success/failure rates at 0.25 Hz for both day and night conditions. These metrics appear in the experimental results but will now be summarized in the abstract for immediate visibility. revision: yes
-
Referee: [Experimental Results] Experimental evaluation (implied in abstract and results sections): no per-sequence matching statistics or ablation isolating the BEV component at exactly 0.25 Hz are described, so the load-bearing assumption that BEV projection compensates for geometric scale change, photometric shifts from moving shadows, and uneven terrain remains untested.
Authors: We acknowledge that additional per-sequence statistics and a targeted ablation would strengthen the evaluation. We will add per-sequence matching statistics (inlier ratios, failure rates) at 0.25 Hz and an ablation isolating the BEV projection component. The revised results section will include quantitative comparisons demonstrating robustness to scale change, photometric shifts from self-illumination, and terrain effects. revision: yes
Circularity Check
Empirical method proposal with external experiments; no derivation chain present
full rationale
The paper introduces BEVIO as a practical VIO pipeline relying on a BEV image-matching scheme, evaluated via photorealistic lunar simulations and real Plaster City day-night rover traverses. No equations, fitted parameters, uniqueness theorems, or ansatzes are referenced that could reduce to self-definition or self-citation. The load-bearing robustness assumption is tested directly against external data rather than derived from the method's own inputs, making the work self-contained against benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Endurance: Lunar South Pole–Aitken Basin Traverse and Sample Return Rover
J. T. Keane, “Endurance: Lunar South Pole–Aitken Basin Traverse and Sample Return Rover.”
-
[2]
The endurance mission progress,
J. D. Baker, H. W. Stone, J. O. Elliott, J. T. Keane, R. P. Kornfeld, H. D. Nayar, and I. A. Nesnas, “The endurance mission progress,” in 2025 IEEE Aerospace Conference, 2025, pp. 1–14
2025
-
[3]
xvio: A range-visual- inertial odometry framework,
J. Delaune, D. S. Bayard, and R. Brockers, “xvio: A range-visual- inertial odometry framework,”arXiv preprint arXiv:2010.06677, 2020
-
[4]
Real-time onboard visual-inertial state estimation and self-calibration of mavs in unknown environments,
S. Weiss, M. W. Achtelik, S. Lynen, M. Chli, and R. Siegwart, “Real-time onboard visual-inertial state estimation and self-calibration of mavs in unknown environments,” in2012 IEEE International Conference on Robotics and Automation, 2012, pp. 957–964
2012
-
[5]
Keyframe-based visual–inertial odometry using nonlinear optimiza- tion,
S. Leutenegger, S. Lynen, M. Bosse, R. Siegwart, and P. Furgale, “Keyframe-based visual–inertial odometry using nonlinear optimiza- tion,”The International Journal of Robotics Research, vol. 34, no. 3, pp. 314–334, 2015
2015
-
[6]
A multi-state constraint kalman filter for vision-aided inertial navigation,
A. I. Mourikis and S. I. Roumeliotis, “A multi-state constraint kalman filter for vision-aided inertial navigation,” inProceedings 2007 IEEE international conference on robotics and automation. IEEE, 2007, pp. 3565–3572
2007
-
[7]
Vins-mono: A robust and versatile monoc- ular visual-inertial state estimator,
T. Qin, P. Li, and S. Shen, “Vins-mono: A robust and versatile monoc- ular visual-inertial state estimator,”IEEE transactions on robotics, vol. 34, no. 4, pp. 1004–1020, 2018
2018
-
[8]
Openvins: A research platform for visual-inertial estimation,
P. Geneva, K. Eckenhoff, W. Lee, Y . Yang, and G. Huang, “Openvins: A research platform for visual-inertial estimation,” in2020 IEEE International Conference on Robotics and Automation (ICRA), 2020, pp. 4666–4672
2020
-
[9]
Robust visual in- ertial odometry using a direct ekf-based approach,
M. Bloesch, S. Omari, M. Hutter, and R. Siegwart, “Robust visual in- ertial odometry using a direct ekf-based approach,” in2015 IEEE/RSJ international conference on intelligent robots and systems (IROS). IEEE, 2015, pp. 298–304
2015
-
[10]
Past, present, and future of simultaneous localization and mapping: Towards the robust-perception age,
C. Cadena, L. Carlone, H. Carrillo, Y . Latif, D. Scaramuzza, J. Neira, I. Reid, and J. Leonard, “Past, present, and future of simultaneous localization and mapping: Towards the robust-perception age,”IEEE Transactions on Robotics, vol. 32, no. 6, p. 1309–1332, 2016
2016
-
[11]
Two years of visual odometry on the mars exploration rovers,
M. Maimone, Y . Cheng, and L. Matthies, “Two years of visual odometry on the mars exploration rovers,”Journal of Field Robotics, vol. 24, no. 3, pp. 169–186, 2007
2007
-
[12]
Visual odometry for the lunar analogue rover “artemis
M. Wagner, D. Wettergreen, and P. Iles, “Visual odometry for the lunar analogue rover “artemis”,” inISAIRAS, 2012
2012
-
[13]
Visual odometry for plan- etary exploration rovers in sandy terrains,
L. Li, J. Lian, L. Guo, and R. Wang, “Visual odometry for plan- etary exploration rovers in sandy terrains,”International Journal of Advanced Robotic Systems, vol. 10, no. 5, p. 234, 2013
2013
-
[14]
Vision-based navigation for the nasa mars helicopter,
D. S. Bayard, D. T. Conway, R. Brockers, J. H. Delaune, L. H. Matthies, H. F. Grip, G. B. Merewether, T. L. Brown, and A. M. San Martin, “Vision-based navigation for the nasa mars helicopter,” in AIAA Scitech 2019 F orum, 2019, p. 1411
2019
-
[15]
Machine learning for high-speed corner detection,
E. Rosten and T. Drummond, “Machine learning for high-speed corner detection,” inEuropean conference on computer vision. Springer, 2006, pp. 430–443
2006
-
[16]
Detection and tracking of point,
C. Tomasi and T. Kanade, “Detection and tracking of point,”Int J Comput Vis, vol. 9, no. 137-154, p. 3, 1991
1991
-
[17]
Surf: Speeded up robust features,
H. Bay, T. Tuytelaars, and L. Van Gool, “Surf: Speeded up robust features,” inEuropean conference on computer vision. Springer, 2006, pp. 404–417
2006
-
[18]
Luvo: Lunar visual odometry using homography-based image feature matching,
R. Soussan, J. McCaffery, S. McMichael, and M. Deans, “Luvo: Lunar visual odometry using homography-based image feature matching,” in2025 IEEE International Conference on Robotics and Automation (ICRA), 2025, pp. 13 428–13 435
2025
-
[19]
Hartley and A
R. Hartley and A. Zisserman,Multiple view geometry in computer vision. Cambridge university press, 2003
2003
-
[20]
Brisk: Binary robust invariant scalable keypoints,
S. Leutenegger, M. Chli, and R. Y . Siegwart, “Brisk: Binary robust invariant scalable keypoints,” in2011 International Conference on Computer Vision, 2011, pp. 2548–2555
2011
-
[21]
Distinctive image features from scale-invariant key- points,
D. G. Lowe, “Distinctive image features from scale-invariant key- points,”International journal of computer vision, vol. 60, no. 2, pp. 91–110, 2004
2004
-
[22]
Dshell-darts: A reusability-focused multi- mission aerospace and robotics simulation toolkit,
J. Garcia-Bonilla, C. Leake, A. Elmquist, T. D. Hasseler, V . Steyert, A. Gaut, and A. Jain, “Dshell-darts: A reusability-focused multi- mission aerospace and robotics simulation toolkit,” in2025 IEEE Aerospace Conference, 2025, pp. 1–13
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.