PSG-Nav: Probabilistic Scene Graph Navigation via Multiverse Decision Making
Pith reviewed 2026-06-28 16:56 UTC · model grok-4.3
The pith
Probabilistic scene graphs with multiverse sampling improve navigation under semantic uncertainty.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
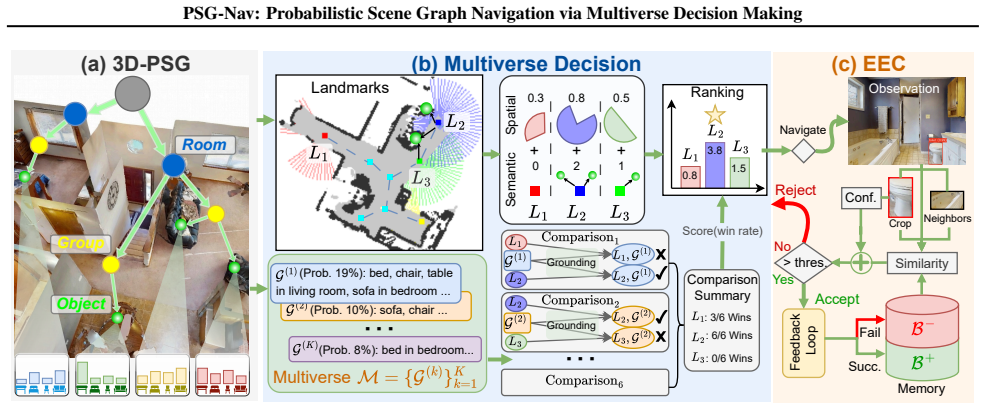
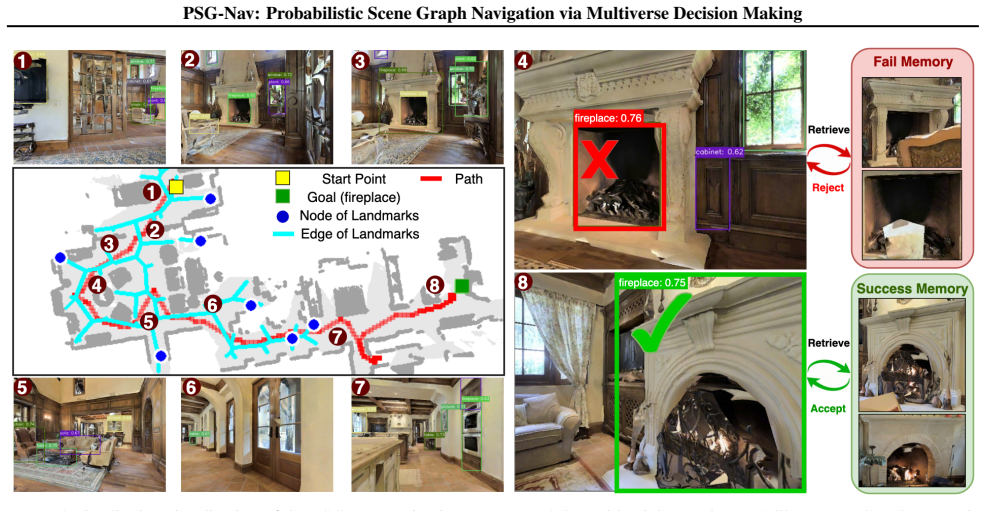
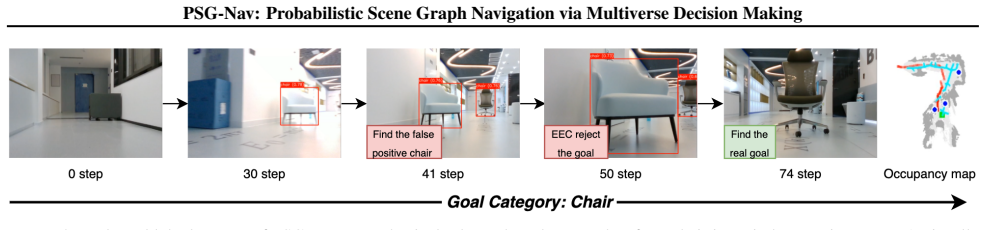
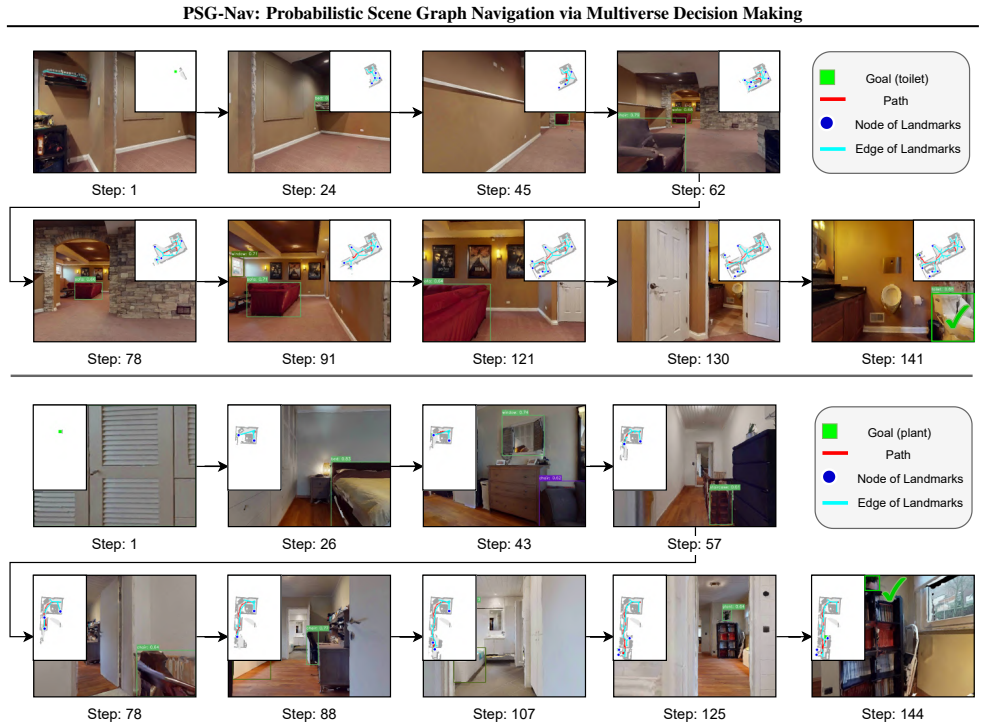
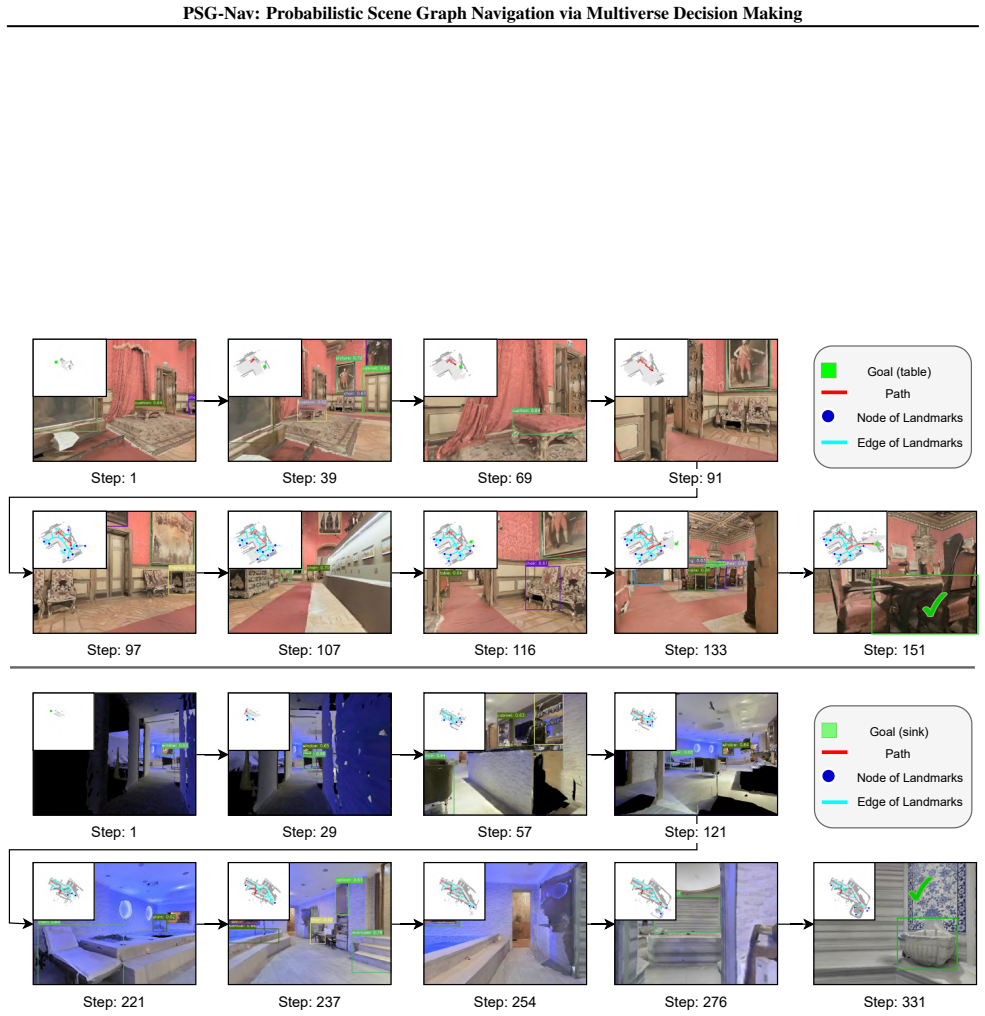
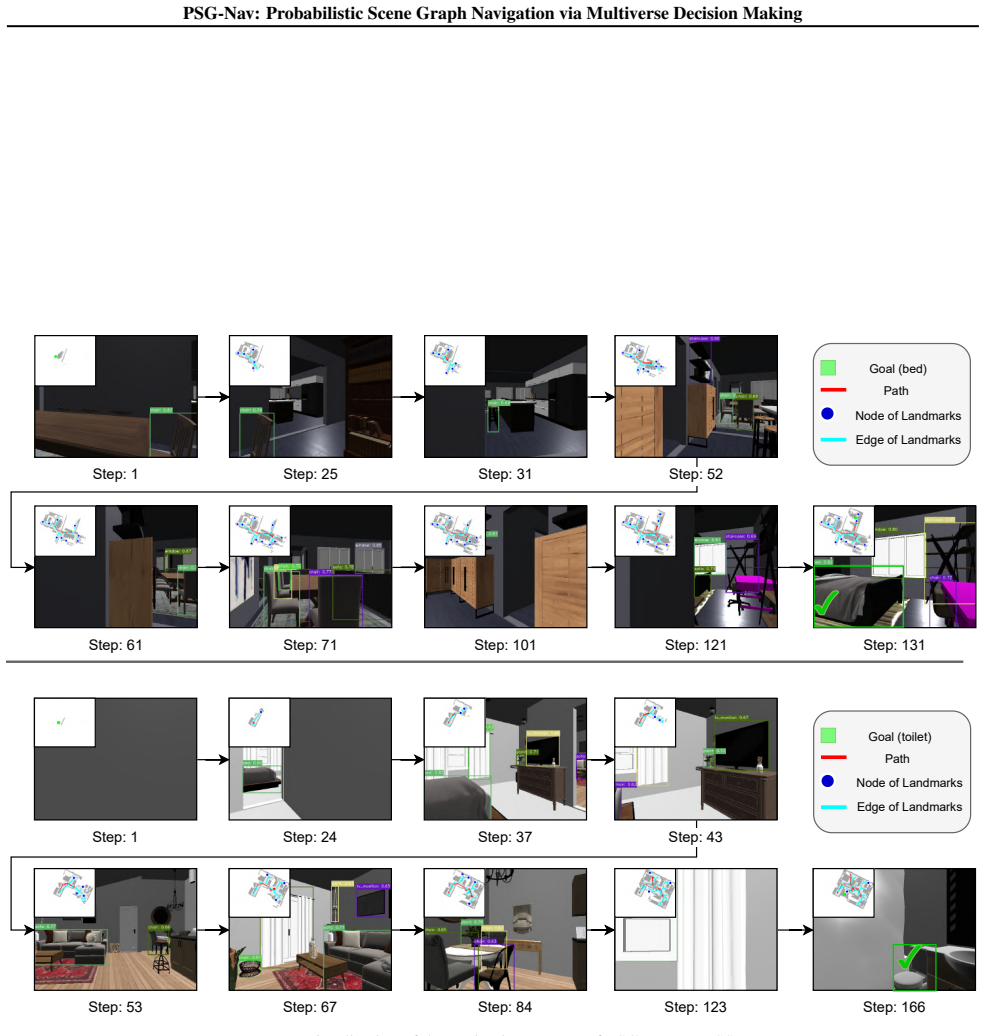
PSG-Nav builds a 3D Probabilistic Scene Graph that stores full semantic categorical distributions to capture perception uncertainty. Multiverse Decision samples multiple most likely world settings from the joint distribution and ranks navigation landmarks according to cross-multiverse compatibility. The Evidential Experience Calibrator performs online lifelong adaptation by validating detections against records of past successes and failures. This combination produces new state-of-the-art success rates of 66.1 percent on MP3D, 44.8 percent on HM3D and 67.9 percent on HSSD.
What carries the argument
The 3D Probabilistic Scene Graph that encodes objects via full categorical distributions, paired with the Multiverse Decision sampler that draws multiple joint configurations and scores landmarks by cross-configuration compatibility.
Load-bearing premise
That sampling multiple world settings from the joint distribution and scoring landmarks by cross-multiverse compatibility, together with online cross-validation against past success and failure memories, will reliably yield globally superior navigation choices under open-vocabulary perception uncertainty.
What would settle it
A controlled comparison on the same MP3D, HM3D and HSSD benchmarks in which a deterministic scene-graph baseline that uses single-label estimates and no multiverse sampling or experience calibrator matches or exceeds the reported success rates.
Figures

read the original abstract
Open-vocabulary navigation requires embodied agents to manage significant perception uncertainty stemming from semantic ambiguity and model errors. However, most existing works settle for local optimal deterministic approaches, depriving complex navigation decision-making over multiple composite possibilities that are critical for globally better solutions. In this paper, we propose Probabilistic Scene Graph Navigation (PSG-Nav), which constructs a 3D Probabilistic Scene Graph that uses full semantic categorical distributions to account for perception uncertainty. To efficiently use the local distributions to compose and reason about the optimal navigation landmarks, we propose Multiverse Decision to sample multiple most likely world settings from the joint distribution, and evaluate navigation landmarks based on the compatibility between landmarks and multiverses. To mitigate false positives due to epistemic uncertainty in open-vocabulary navigation, we introduce the Evidential Experience Calibrator, which enables online lifelong adaptation by cross-validating detections against memories of past successes and failures. Extensive experiments on widely-used benchmarks MP3D, HM3D, and HSSD demonstrate that PSG-Nav establishes new state-of-the-art results, achieving Success Rates of 66.1%, 44.8%, and 67.9%, respectively. Code is available at: https://psg-nav.github.io/
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes PSG-Nav for open-vocabulary 3D navigation under perception uncertainty. It constructs a 3D Probabilistic Scene Graph using full semantic categorical distributions, introduces Multiverse Decision making that samples multiple most-likely world settings from the joint distribution and scores landmarks by cross-multiverse compatibility, and adds an Evidential Experience Calibrator for online lifelong adaptation via cross-validation against past success/failure memories. The central claim is new state-of-the-art success rates of 66.1%, 44.8%, and 67.9% on MP3D, HM3D, and HSSD.
Significance. If the multiverse sampling demonstrably improves global decisions by exploiting label dependencies in the joint distribution and the calibrator reliably mitigates false positives beyond single-world baselines, the framework could advance uncertainty-aware planning in embodied agents. Code availability aids reproducibility.
major comments (2)
- [Abstract] Abstract: the SOTA numerical results (66.1/44.8/67.9 SR) are stated without any experimental protocol, baseline comparisons, ablation studies, error bars, or dataset details, so the data-to-claim link cannot be verified.
- [Abstract] Abstract: the Multiverse Decision claim rests on sampling from the joint categorical distribution producing plausible alternatives rather than independent noise, yet no description is given of how label dependencies are modeled or validated in the joint.
minor comments (1)
- [Abstract] Abstract: the phrase 'widely-used benchmarks' is used without specifying exact splits, metrics beyond Success Rate, or evaluation protocol.
Simulated Author's Rebuttal
We appreciate the referee's feedback. Below we provide point-by-point responses to the major comments.
read point-by-point responses
-
Referee: [Abstract] Abstract: the SOTA numerical results (66.1/44.8/67.9 SR) are stated without any experimental protocol, baseline comparisons, ablation studies, error bars, or dataset details, so the data-to-claim link cannot be verified.
Authors: We note that abstracts are intended to provide a high-level overview rather than exhaustive experimental details. The full experimental protocol, baseline comparisons, ablation studies, error bars, and dataset specifics are presented in Sections 4 and 5 of the manuscript. The abstract does specify the benchmarks (MP3D, HM3D, HSSD) and the success rates, with comparisons available in the main text. We do not believe a revision to the abstract is necessary, as the data-to-claim connection is established in the body of the paper. revision: no
-
Referee: [Abstract] Abstract: the Multiverse Decision claim rests on sampling from the joint categorical distribution producing plausible alternatives rather than independent noise, yet no description is given of how label dependencies are modeled or validated in the joint.
Authors: The abstract summarizes the Multiverse Decision making approach. The modeling of label dependencies in the joint categorical distribution is described in detail in Section 3, where the probabilistic scene graph incorporates categorical distributions and relational structures to enable dependent sampling. This is validated through experiments showing improved performance over independent sampling baselines. No change to the abstract is required. revision: no
Circularity Check
No circularity: method is a procedural construction without self-referential reductions
full rationale
The provided abstract and description outline a pipeline (probabilistic scene graph from categorical distributions, multiverse sampling from the joint, compatibility scoring, and evidential calibration against memory) that is presented as an algorithmic approach rather than a mathematical derivation. No equations, fitted parameters renamed as predictions, self-definitional quantities, or load-bearing self-citations appear in the text. The SOTA performance numbers are empirical outcomes on external benchmarks, not quantities forced by construction from the inputs. The derivation chain is therefore self-contained against external validation and receives the default non-circularity finding.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Matterport3D: Learning from RGB-D Data in Indoor Environments
PMLR, 2023. Cai, W., Huang, S., Cheng, G., Long, Y ., Gao, P., Sun, C., and Dong, H. Bridging zero-shot object navigation and foundation models through pixel-guided navigation skill. In2024 IEEE International Conference on Robotics and Automation (ICRA), pp. 5228–5234. IEEE, 2024. Cao, Y ., Zhang, J., Yu, Z., Liu, S., Qin, Z., Zou, Q., Du, B., and Xu, K. ...
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[2]
Dd-ppo: Learning near-perfect pointgoal navigators from 2.5 billion frames,
URL https://openreview.net/forum? id=4ZK8ODNyFXx. Ren, T., Liu, S., Zeng, A., Lin, J., Li, K., Cao, H., Chen, J., Huang, X., Chen, Y ., Yan, F., Zeng, Z., Zhang, H., Li, F., Yang, J., Li, H., Jiang, Q., and Zhang, L. Grounded sam: Assembling open-world models for diverse visual tasks, 2024. Sun, X., Liu, L., Zhi, H., Qiu, R., and Liang, J. Prioritized sem...
-
[3]
Room: unknown, Objects: cushion, cushion
-
[4]
Room: bedroom, Objects: chair, cushion, cushion
-
[5]
Room: living room, Objects: drawers, staircase
-
[6]
Room: bedroom, Objects: fitness equipment, staircase
-
[7]
Room: living room, Objects: staircase
-
[8]
Room: bedroom, Objects: fitness equipment, fitness equipment
-
[9]
Room: unknown, Objects: cushion, chair
-
[10]
Room: unknown, Objects: chair, cushion
-
[11]
Room: bedroom, Objects: chair, cushion, chair
-
[12]
Room: bedroom, Objects: chair, chair, cushion
-
[13]
Room: bedroom, Objects: stool, staircase
-
[14]
plausible
Room: living room, Objects: drawers Question:Which groups represent semantically and spatially consistent configurations in an indoor environment? LLM Response (JSON only): {"plausible": [2, 7, 8, 9, 10]} A.5.1. ROOM-LEVELLOGICALPRUNINGPROMPT Once group-level configurations are validated, the agent evaluates the overall room-level layout to ensure the com...
-
[15]
Room: bedroom Group 1: chair, cushion, cushion Group 2: fitness equipment, fitness equipment
-
[16]
Room: unknown Group 1: cushion, chair
-
[17]
Room: unknown Group 1: chair, cushion
-
[18]
Room: bedroom Group 1: chair, cushion, chair Group 2: fitness equipment, fitness equipment
-
[19]
plausible
Room: bedroom Group 1: chair, chair, cushion Group 2: fitness equipment, fitness equipment Question:Which configurations represent logically consistent architectural layouts? LLM Response (JSON only): {"plausible": [3, 4, 5]} A.5.2. STOCHASTICPAIRWISECOMPARISONPROMPT After instantiating the multiverse M, the LLM evaluates candidate landmarks by comparing ...
-
[20]
Which location is more likely to have drawers based on room type and nearby objects?
-
[21]
Which has better exploration potential (unexplored areas, near frontiers)?
-
[22]
A” or “B
Which provides better information gain for finding the goal? Answer with ONLY “A” or “B” and a brief reason (one sentence). LLM Response:A. The living room is more likely to contain drawers based on room type and the presence of nearby objects like a cushion, which suggests a more domestic setting. A.6. Hyperparameter Settings Table 8 summarizes the key h...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.