Collaborative Space Object Detection with Multi-Satellite Viewpoints in LEO Constellations
Pith reviewed 2026-06-28 15:50 UTC · model grok-4.3
The pith
Fusing multi-view observations from multiple LEO satellites improves mAP50 and mAP50-95 in YOLO-based space object detectors.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
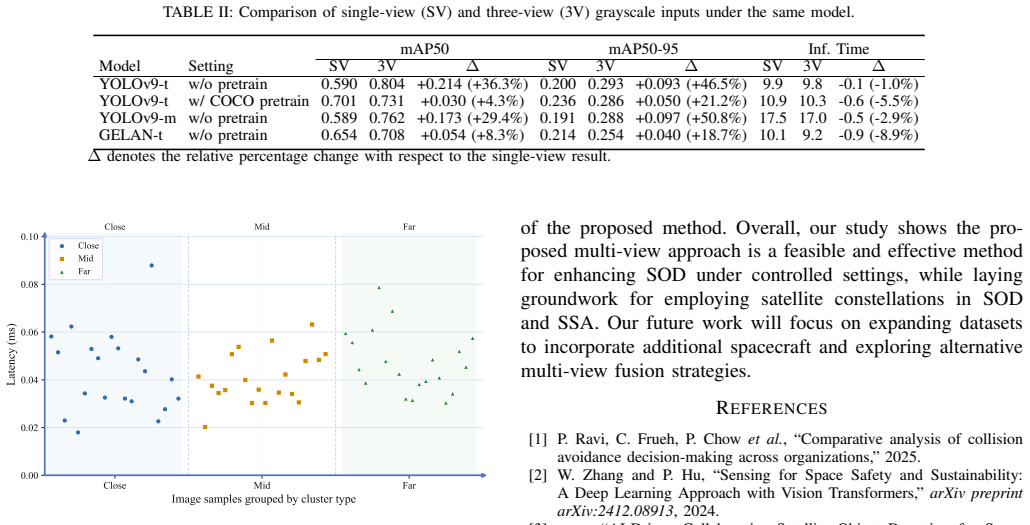
Our experiments show that using multi-view inputs is feasible in most cases and typically produces better results for mAP50 and mAP50-95. For example, in model YOLOv9-m, single-view compared to a three-view fused RGB setting, mAP50 increases from 0.638 to 0.732, while mAP50-95 improves from 0.227 to 0.276. Compared with the single-view setting, the best three-view grayscale configuration improves mAP50 by 36.3% and mAP50-95 by 46.5%. These findings establish multi-view fusion as a viable and effective strategy for SOD, with broad implications for space situational awareness in LEO constellation deployments.
What carries the argument
Multi-view pipeline and input representations (fused RGB, grayscale configurations) that feed synchronized observations from several satellite viewpoints into YOLO detectors.
If this is right
- Multi-view inputs are feasible in most tested cases for space object detection.
- Multi-view fusion typically raises both mAP50 and mAP50-95 over single-view baselines.
- Three-view fused RGB raises mAP50 from 0.638 to 0.732 and mAP50-95 from 0.227 to 0.276 on YOLOv9-m.
- The strongest three-view grayscale setting improves mAP50 by 36.3 percent and mAP50-95 by 46.5 percent.
- Multi-view fusion offers a workable route to better space situational awareness for LEO constellation operations.
Where Pith is reading between the lines
- Constellations already flying in formation could share raw or lightly processed views to improve detection without new hardware.
- Multi-view fusion may help resolve objects that are partially occluded or low-contrast from any single satellite.
- The same pipeline could be tested on mixed visible-infrared inputs once real multi-band LEO data become available.
- Onboard fusion might lower the required downlink bandwidth by sending only confirmed detections rather than full images.
Load-bearing premise
The simulated or generated multi-view datasets used in the experiments accurately represent the geometric, lighting, and timing conditions that would occur between real satellites in LEO constellations.
What would settle it
Applying the same YOLO models and fusion methods to actual multi-view imagery collected by real LEO satellites and measuring no gain or a loss in mAP50 and mAP50-95 relative to single-view baselines.
Figures

read the original abstract
With the growing number of satellites in low Earth orbit (LEO) constellations, the near-Earth space environment has become increasingly congested, making space object detection (SOD) a pressing challenge for space safety and sustainability. To mitigate collision risks and ensure the continuity of space operations, SOD systems must deliver fast and accurate detection under stringent onboard constraints. In this paper, we investigate the potential of multi-viewpoint observation fusion within a deep learning (DL) framework to enhance SOD performance. We design a practical multi-view pipeline and several input representations for feeding multi-view data into YOLO-based detectors. Our experiments show that using multi-view inputs is feasible in most cases and typically produces better results for mAP50 and mAP50-95. For example, in model YOLOv9-m, single-view compared to a three-view fused RGB setting, mAP50 increases from 0.638 to 0.732, while mAP50-95 improves from 0.227 to 0.276. Compared with the single-view setting, the best three-view grayscale configuration improves mAP50 by 36.3% and mAP50-95 by 46.5%. These findings establish multi-view fusion as a viable and effective strategy for SOD, with broad implications for space situational awareness in LEO constellation deployments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper investigates multi-view fusion for space object detection (SOD) in LEO constellations using YOLO-based detectors. It designs a multi-view pipeline and input representations (e.g., fused RGB or grayscale from multiple satellite viewpoints) and reports empirical results showing that three-view inputs typically improve mAP50 and mAP50-95 over single-view baselines, with specific gains such as YOLOv9-m mAP50 rising from 0.638 to 0.732 in RGB fusion and up to 36.3% mAP50 improvement in the best grayscale case.
Significance. If the simulation accurately captures real LEO conditions, the work establishes multi-view fusion as a viable enhancement for onboard SOD, with direct implications for space situational awareness in growing constellations. The direct empirical comparisons on held-out test data (no circularity or parameter reduction) and use of standard YOLO models are strengths that make the numerical gains interpretable and reproducible in principle.
major comments (2)
- [Abstract and Experiments] Abstract and Experiments: The headline mAP gains (e.g., YOLOv9-m three-view RGB mAP50 = 0.732 vs. single-view 0.638) are obtained exclusively on generated multi-view inputs. No description is given of the simulator's modeling of relative satellite poses, solar illumination angles, Earth-shadow transitions, or inter-satellite timing offsets, nor is any cross-validation against real LEO imagery reported. This assumption is load-bearing for the claim that multi-view fusion produces better results under actual constellation conditions.
- [Methods and Experiments] Methods/Experiments: The abstract and reported results provide no details on dataset construction (number of scenes, object densities, viewpoint generation), training protocol (hyperparameters, augmentation, optimizer), or statistical significance testing of the mAP differences. These omissions make it difficult to assess whether the observed improvements (e.g., 46.5% mAP50-95 gain in best grayscale case) are robust or sensitive to simulation choices.
minor comments (2)
- [Abstract] The abstract would benefit from a brief statement on the number of models tested and the range of input representations evaluated to give readers immediate context for the reported gains.
- [Figures and Tables] Figure captions and table headers should explicitly state whether metrics are computed on simulated or real data and include error bars or confidence intervals if multiple runs were performed.
Simulated Author's Rebuttal
We thank the referee for their thorough review and constructive comments. We address the major comments below and will revise the manuscript accordingly to improve clarity on the simulation details and experimental protocol.
read point-by-point responses
-
Referee: [Abstract and Experiments] Abstract and Experiments: The headline mAP gains (e.g., YOLOv9-m three-view RGB mAP50 = 0.732 vs. single-view 0.638) are obtained exclusively on generated multi-view inputs. No description is given of the simulator's modeling of relative satellite poses, solar illumination angles, Earth-shadow transitions, or inter-satellite timing offsets, nor is any cross-validation against real LEO imagery reported. This assumption is load-bearing for the claim that multi-view fusion produces better results under actual constellation conditions.
Authors: We agree that additional details on the simulation environment are necessary to support the claims. The current manuscript focuses on the multi-view fusion pipeline and empirical results but omits explicit description of the simulator parameters. In the revised version, we will add a dedicated subsection in the Methods or Experiments section detailing the modeling of relative satellite poses, solar illumination, Earth-shadow transitions, and timing offsets. Regarding cross-validation with real LEO imagery, this is not feasible within the scope of this work due to the lack of publicly available multi-view LEO datasets with accurate ground truth annotations for space objects. Our study is intended as a simulation-based investigation to demonstrate the potential benefits, and we will explicitly state the limitations of the simulation in the revised manuscript. revision: yes
-
Referee: [Methods and Experiments] Methods/Experiments: The abstract and reported results provide no details on dataset construction (number of scenes, object densities, viewpoint generation), training protocol (hyperparameters, augmentation, optimizer), or statistical significance testing of the mAP differences. These omissions make it difficult to assess whether the observed improvements (e.g., 46.5% mAP50-95 gain in best grayscale case) are robust or sensitive to simulation choices.
Authors: We acknowledge the lack of these details in the current version. In the revision, we will expand the Experiments section to include: (1) dataset construction details such as the number of scenes generated, object densities, and how viewpoints were generated; (2) full training protocol including hyperparameters, data augmentations, and optimizer settings; and (3) results of statistical significance testing (e.g., using paired t-tests or bootstrap methods) on the mAP differences to demonstrate robustness. This will allow readers to better evaluate the reliability of the reported improvements. revision: yes
Circularity Check
No circularity; empirical mAP gains from direct held-out comparisons
full rationale
The paper reports experimental results comparing single-view vs. multi-view inputs to standard YOLO detectors on held-out test data from simulated multi-view datasets. The claimed improvements (e.g., mAP50 rising from 0.638 to 0.732) are measured quantities, not quantities derived from equations or parameters that reduce to the inputs by construction. No self-citations, fitted parameters renamed as predictions, or ansatzes appear in the load-bearing steps. The evaluation is self-contained against the paper's own test splits.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Mean average precision at IoU thresholds of 0.5 and 0.5-0.95 is a suitable primary metric for evaluating space object detection quality.
Reference graph
Works this paper leans on
-
[1]
Comparative analysis of collision avoidance decision-making across organizations,
P. Ravi, C. Frueh, P. Chowet al., “Comparative analysis of collision avoidance decision-making across organizations,” 2025
2025
-
[2]
Sensing for Space Safety and Sustainability: A Deep Learning Approach with Vision Transformers,
W. Zhang and P. Hu, “Sensing for Space Safety and Sustainability: A Deep Learning Approach with Vision Transformers,”arXiv preprint arXiv:2412.08913, 2024
-
[3]
AI-Driven Collaborative Satellite Object Detection for Space Sustainability,
——, “AI-Driven Collaborative Satellite Object Detection for Space Sustainability,”arXiv preprint arXiv:2508.00755, 2025
-
[4]
Spark – spacecraft recognition leveraging knowledge of space environment,
M. A. Musallam, K. Al Ismaeil, O. Oyedotunet al., “Spark – spacecraft recognition leveraging knowledge of space environment,”arXiv preprint arXiv:2104.05978, pp. 1–5, 2021
-
[5]
A spacecraft dataset for detection, segmentation and parts recognition,
H. A. Dung, B. Chen, and T.-J. Chin, “A spacecraft dataset for detection, segmentation and parts recognition,” in2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), 2021, pp. 2012–2019
2021
-
[6]
Toward onboard ai-enabled solutions to space ob- ject detection for space sustainability,
W. Zhang and P. Hu, “Toward onboard ai-enabled solutions to space ob- ject detection for space sustainability,”arXiv preprint arXiv:2505.01650, 2025
-
[7]
You Only Look Once: Unified, Real-Time Object Detection
J. Redmon, S. Divvala, R. Girshicket al., “You only look once: Unified, real-time object detection,”arXiv preprint arXiv:1506.02640, 2015
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[8]
Yolo9000: better, faster, stronger,
J. Redmon and A. Farhadi, “Yolo9000: better, faster, stronger,” in Proceedings of the IEEE conference on computer vision and pattern recognition, 2017, pp. 7263–7271
2017
-
[9]
YOLOv3: An Incremental Improvement
——, “Yolov3: An incremental improvement,”arXiv preprint arXiv:1804.02767, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[10]
Yolov7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors,
C.-Y . Wang, A. Bochkovskiy, and H.-Y . M. Liao, “Yolov7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2023, pp. 7464–7475
2023
-
[11]
arXiv preprint arXiv:2402.13616 (2024)
C.-Y . Wang, I.-H. Yeh, and H.-Y . M. Liao, “Yolov9: Learning what you want to learn using programmable gradient information,”arXiv preprint arXiv:2402.13616, 2024
-
[12]
Small object detection: A comprehensive survey on challenges, techniques and real-world applications,
M. Nikouei, B. Baroutian, S. Nabaviet al., “Small object detection: A comprehensive survey on challenges, techniques and real-world applications,”Intelligent Systems with Applications, vol. 27, p. 200561, 2025
2025
-
[13]
A survey of multi-view representa- tion learning,
Y . Li, M. Yang, and Z. Zhang, “A survey of multi-view representa- tion learning,”IEEE transactions on knowledge and data engineering, vol. 31, no. 10, pp. 1863–1883, 2018
2018
-
[14]
Space-based optical observations on space debris via multipoint of view,
Z. Li, Y . Wang, and W. Zheng, “Space-based optical observations on space debris via multipoint of view,”International Journal of Aerospace Engineering, vol. 2020, p. 8328405, 2020
2020
-
[15]
Grad-cam++: Gen- eralized gradient-based visual explanations for deep convolutional net- works,
A. Chattopadhay, A. Sarkar, P. Howladeret al., “Grad-cam++: Gen- eralized gradient-based visual explanations for deep convolutional net- works,” in2018 IEEE winter conference on applications of computer vision (WACV). IEEE, 2018, pp. 839–847
2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.