Neural Navigation Functions for Zero-Shot Generalizable Motion Planning
Pith reviewed 2026-06-28 09:42 UTC · model grok-4.3
The pith
A learned mapping from environment features to PDE coefficients produces navigation policies that stay collision-free and goal-directed by construction on any new geometry.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Neural-NF learns a mapping from intrinsic Laplacian-derived features to local PDE coefficients; solving the resulting boundary-value problem on each new domain produces a value function whose gradient yields a policy that remains collision-free, provides monotonic descent, and attains a global minimum only at the goal for every admissible learned model. The same construction admits a linearly-solvable optimal-control interpretation at any parameter setting.
What carries the argument
Mapping from intrinsic Laplacian-derived features to local PDE coefficients inside a structured elliptic boundary-value problem, whose solution supplies the navigation value function.
If this is right
- Any admissible learned model produces a collision-free policy with monotonic descent on every geometry where the elliptic problem remains well-posed.
- The policy has a unique global minimum at the goal and no other local minima by construction.
- The same policy admits a linearly-solvable optimal-control interpretation for every choice of learned parameters.
- Zero-shot transfer is possible across diverse unseen environment geometries.
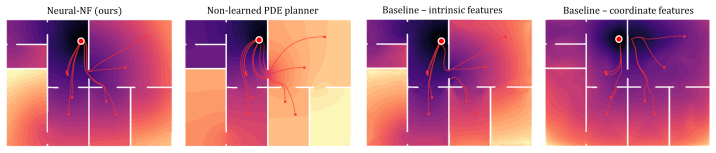
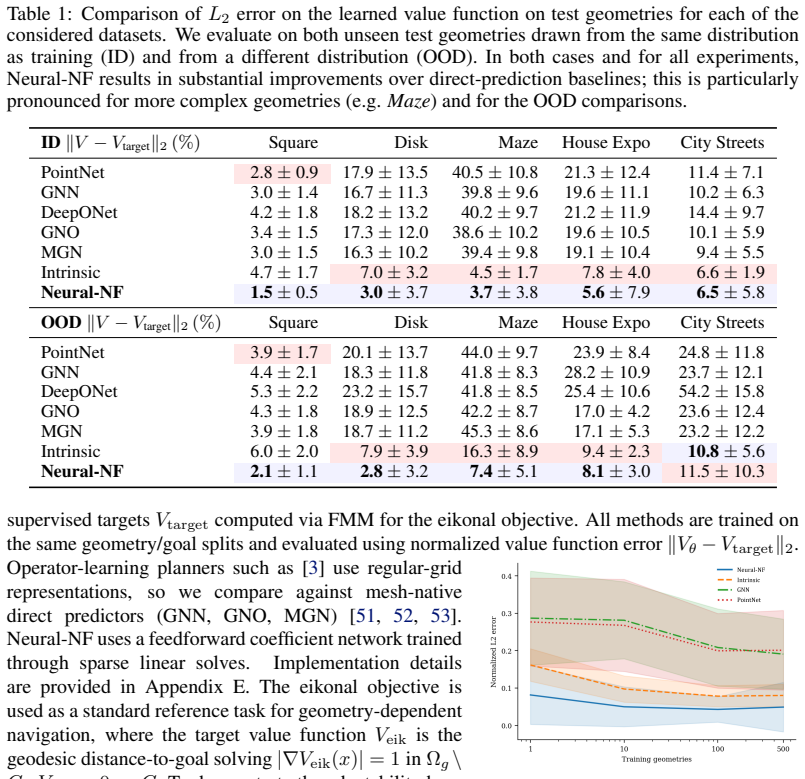
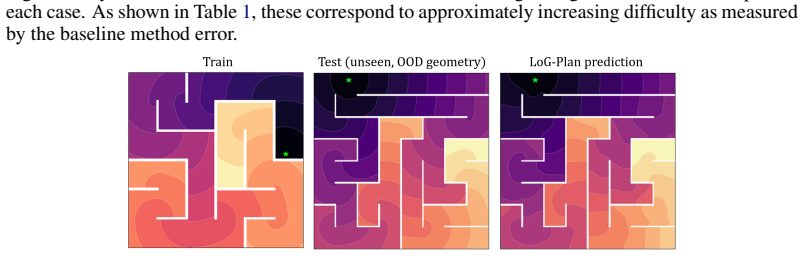
- Performance exceeds that of planners that directly predict the value function, with reported gains up to five times higher success rate.
Where Pith is reading between the lines
- The same feature-to-coefficient template could be reused for other planning problems whose correctness rests on an elliptic or variational structure.
- If the Laplacian features can be computed from partial observations, the method might extend to online replanning in partially known or changing environments.
- The linear-solvability property suggests the approach could serve as a building block for provably safe learned controllers in higher-dimensional configuration spaces.
Load-bearing premise
The learned mapping always outputs coefficients that keep the elliptic boundary-value problem well-posed and produce a globally consistent value function on each new domain.
What would settle it
A test environment in which the learned coefficients render the elliptic problem ill-posed or create a value function with a local minimum away from the goal, so that the resulting policy either collides or fails to reach the goal.
Figures






read the original abstract
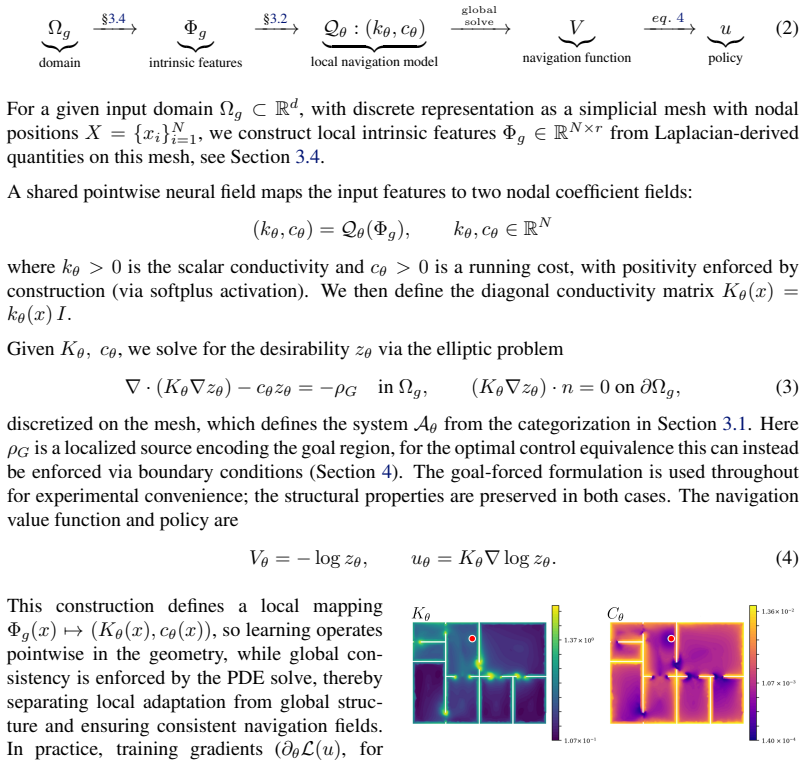
We introduce Neural Navigation Functions (Neural-NF), a learned reactive navigation function capable of zero-shot transfer across unseen environment geometries. Neural-NF places data-driven adaptation within a structured elliptic planner, where the navigation objective is learned while planner structure is preserved by construction. Specifically, intrinsic Laplacian-derived features are mapped to local PDE coefficients, and solving the resulting boundary value problem produces a globally consistent value function on each target domain. For every admissible learned model, the resulting policy is collision-free, provides monotonic descent and a global minimum at the goal by construction. This admits a linearly-solvable optimal-control interpretation for any parameter setting. Empirically, Neural-NF achieves strong zero-shot transfer across diverse geometries and outperforms learned planners that directly predict the value function by up to a $5\times$ improvement.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Neural Navigation Functions (Neural-NF), which embeds a learned mapping from intrinsic Laplacian-derived features to local PDE coefficients inside a structured elliptic boundary-value problem. Solving the resulting BVP on each target domain yields a value function whose induced policy is claimed to be collision-free, monotonically descending, and globally minimized at the goal for every admissible learned model; the construction is further asserted to admit a linearly-solvable optimal-control interpretation. Empirical evaluation reports up to 5× improvement in zero-shot transfer over planners that directly regress the value function.
Significance. If the admissibility conditions can be shown to be preserved by the learned mapping and the by-construction guarantees are rigorously established, the work would usefully combine the generalization benefits of data-driven adaptation with the safety and optimality properties of classical elliptic navigation functions. The explicit separation of learned coefficients from the planner structure is a methodological strength that could inform other hybrid planning architectures.
major comments (2)
- [Abstract] Abstract: The central claim that 'for every admissible learned model, the resulting policy is collision-free, provides monotonic descent and a global minimum at the goal by construction' is load-bearing, yet the abstract supplies neither the explicit admissibility conditions on the PDE coefficients nor any mechanism (regularization, projection, or architectural constraint) that guarantees the neural mapping produces coefficients keeping the elliptic BVP uniformly elliptic and globally consistent on unseen domains.
- [Abstract] Abstract (Neural-NF construction paragraph): Without a derivation or quantitative verification that the learned coefficients remain admissible on target geometries, it is impossible to confirm that the zero-shot transfer properties do not reduce to a fitted quantity rather than holding independently of the network weights.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the two major comments on the abstract point by point below, proposing targeted revisions where appropriate.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that 'for every admissible learned model, the resulting policy is collision-free, provides monotonic descent and a global minimum at the goal by construction' is load-bearing, yet the abstract supplies neither the explicit admissibility conditions on the PDE coefficients nor any mechanism (regularization, projection, or architectural constraint) that guarantees the neural mapping produces coefficients keeping the elliptic BVP uniformly elliptic and globally consistent on unseen domains.
Authors: We agree the abstract would be strengthened by briefly stating the admissibility conditions and enforcement mechanism. The full manuscript (Section 3.2) defines admissibility via uniform ellipticity requirements on the coefficients (diffusion coefficient bounded below by a positive constant, reaction term non-negative) together with boundary consistency. These are enforced by the network's final activation functions and a soft penalty term in the training loss. We will revise the abstract to include a concise clause referencing these conditions and the architectural constraint. revision: yes
-
Referee: [Abstract] Abstract (Neural-NF construction paragraph): Without a derivation or quantitative verification that the learned coefficients remain admissible on target geometries, it is impossible to confirm that the zero-shot transfer properties do not reduce to a fitted quantity rather than holding independently of the network weights.
Authors: Section 3 derives that the collision-free monotonic descent and global minimum properties follow directly from the elliptic BVP structure once admissibility holds, independent of the specific coefficient values or network weights. Section 5 reports quantitative verification: on held-out geometries we measure the fraction of domains where learned coefficients satisfy the ellipticity bounds and empirically confirm the induced policy satisfies descent. The zero-shot improvement is therefore attributable to the preserved planner structure. We will add a short clarifying phrase to the abstract. revision: yes
Circularity Check
No significant circularity; properties derived from elliptic BVP structure independent of learned coefficients
full rationale
The abstract states that collision-free monotonic descent and global minimum hold 'by construction' for every admissible learned model via the elliptic planner and BVP solution. This is a structural property of the PDE once coefficients are fixed and admissible, not a reduction of the output policy to the neural mapping inputs or a fitted quantity. No equations, self-citations, or renamings are exhibited that make the zero-shot claim equivalent to its inputs by definition. The admissibility condition is an assumption on the mapping rather than a self-referential definition. The derivation chain remains self-contained against the stated planner structure.
Axiom & Free-Parameter Ledger
free parameters (1)
- neural network weights for feature-to-coefficient mapping
axioms (1)
- domain assumption The elliptic boundary-value problem with the learned coefficients remains well-posed and yields a globally consistent value function on each target domain.
invented entities (1)
-
Neural Navigation Function (Neural-NF)
no independent evidence
Reference graph
Works this paper leans on
-
[1]
O. Khatib. Real-time obstacle avoidance for manipulators and mobile robots.The international journal of robotics research, 5(1):90–98, 1986
1986
-
[2]
Rimon.Exact robot navigation using artificial potential functions
E. Rimon.Exact robot navigation using artificial potential functions. Yale University, 1990
1990
- [3]
- [4]
-
[5]
R. Ni, A. H. Qureshi, et al. Physics-informed temporal difference metric learning for robot motion planning. InInternational Conference on Learning Representations, volume 2025, pages 30632–30649, 2025
2025
-
[6]
H. J. Kappen. Linear theory for control of nonlinear stochastic systems.Physical review letters, 95(20):200201, 2005
2005
-
[7]
E. Todorov. Compositionality of optimal control laws.Advances in neural information pro- cessing systems, 22, 2009
2009
-
[8]
Dvijotham and E
K. Dvijotham and E. Todorov. Linearly solvable optimal control.Reinforcement learning and approximate dynamic programming for feedback control, pages 119–141, 2012
2012
-
[9]
D. E. Koditschek and E. Rimon. Robot navigation functions on manifolds with boundary. Advances in applied mathematics, 11(4):412–442, 1990
1990
-
[10]
Wang and G
Y . Wang and G. S. Chirikjian. A new potential field method for robot path planning. In Proceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No. 00CH37065), volume 2, pages 977–982. IEEE, 2000
2000
-
[11]
D. C. Conner, A. A. Rizzi, and H. Choset. Composition of local potential functions for global robot control and navigation. InProceedings 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003)(Cat. No. 03CH37453), volume 4, pages 3546–
2003
-
[12]
Gingras, E
D. Gingras, E. Dupuis, G. Payre, and J. de Lafontaine. Path planning based on fluid mechanics for mobile robots using unstructured terrain models. In2010 IEEE International Conference on Robotics and Automation, pages 1978–1984. IEEE, 2010
1978
-
[13]
A. A. Masoud. Motion planning with gamma-harmonic potential fields.IEEE Transactions on Aerospace and Electronic Systems, 48(4):2786–2801, 2012
2012
-
[14]
Palm and D
R. Palm and D. Driankov. Fluid mechanics for path planning and obstacle avoidance of mobile robots. In2014 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO), volume 2, pages 231–238. IEEE, 2014. 9
2014
-
[15]
Takei, R
R. Takei, R. Tsai, H. Shen, and Y . Landa. A practical path-planning algorithm for a simple car: a hamilton-jacobi approach. InProceedings of the 2010 American control conference, pages 6175–6180. IEEE, 2010
2010
-
[16]
Theodorou, J
E. Theodorou, J. Buchli, and S. Schaal. A generalized path integral control approach to rein- forcement learning.The Journal of Machine Learning Research, 11:3137–3181, 2010
2010
-
[17]
J. Wang, T. Zhang, N. Ma, Z. Li, H. Ma, F. Meng, and M. Q.-H. Meng. A survey of learning- based robot motion planning.IET Cyber-Systems and Robotics, 3(4):302–314, 2021
2021
-
[18]
A. H. Qureshi, A. Simeonov, M. J. Bency, and M. C. Yip. Motion planning networks. In2019 International Conference on Robotics and Automation (ICRA), pages 2118–2124. IEEE, 2019
2019
-
[19]
Tamar, Y
A. Tamar, Y . Wu, G. Thomas, S. Levine, and P. Abbeel. Value iteration networks.Advances in neural information processing systems, 29, 2016
2016
-
[20]
W. H. Chen, Y . Liu, A. Buynitsky, and A. H. Qureshi. Online hierarchical policy learning using physics priors for robot navigation in unknown environments. In2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 2092–2099. IEEE, 2025
2092
-
[21]
X. Li, S. De Mello, X. Wang, M.-H. Yang, J. Kautz, and S. Liu. Learning continuous environ- ment fields via implicit functions.arXiv preprint arXiv:2111.13997, 2021
arXiv 2021
- [22]
-
[23]
Ni and A
R. Ni and A. H. Qureshi. Physics-informed neural motion planning on constraint manifolds. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 12179– 12185. IEEE, 2024
2024
-
[24]
H. Ren, R. Ni, and A. H. Qureshi. Physics-informed neural time fields for prehensile object manipulation. In2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 11327–11334. IEEE, 2025
2025
-
[25]
Y . Liu, A. Buynitsky, R. Ni, and A. H. Qureshi. Physics-informed neural motion planning via domain decomposition in large environments. In2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 11411–11418. IEEE, 2025
2025
-
[26]
X. Shen, H. Peng, Z. Yang, J. Xu, H. Bao, R. Hu, and Z. Cui. Pc-planner: Physics-constrained self-supervised learning for robust neural motion planning with shape-aware distance function. InSIGGRAPH Asia 2024 Conference Papers, pages 1–11, 2024
2024
-
[27]
A. K. Li, T. C. Silva, V . Edwards, V . Kumar, and M. A. Hsieh. Koopmotion: Learning almost divergence free koopman flow fields for motion planning.arXiv preprint arXiv:2509.09074, 2025
arXiv 2025
-
[28]
H. Viswanath, J. Lu, S. T. Bukhari, D. Conover, Z. Wang, and A. Bera. Physics informed viscous value representations.arXiv preprint arXiv:2602.23280, 2026
Pith/arXiv arXiv 2026
-
[29]
Ichter, J
B. Ichter, J. Harrison, and M. Pavone. Learning sampling distributions for robot motion plan- ning. In2018 IEEE International Conference on Robotics and Automation (ICRA), pages 7087–7094. IEEE, 2018
2018
-
[30]
Yonetani, T
R. Yonetani, T. Taniai, M. Barekatain, M. Nishimura, and A. Kanezaki. Path planning us- ing neural a* search. InInternational conference on machine learning, pages 12029–12039. PMLR, 2021
2021
-
[31]
Y . Hassidof, T. Jurgenson, and K. Solovey. Train-once plan-anywhere kinodynamic motion planning via diffusion trees.arXiv preprint arXiv:2508.21001, 2025. 10
arXiv 2025
-
[32]
Rousseas, C
P. Rousseas, C. Bechlioulis, and K. J. Kyriakopoulos. Harmonic-based optimal motion plan- ning in constrained workspaces using reinforcement learning.IEEE Robotics and Automation Letters, 6(2):2005–2011, 2021
2005
-
[33]
Rousseas, C
P. Rousseas, C. Bechlioulis, and K. Kyriakopoulos. Reactive optimal motion planning for a class of holonomic planar agents using reinforcement learning with provable guarantees. Frontiers in Robotics and AI, 10:1255696, 2024
2024
-
[34]
Amos and J
B. Amos and J. Z. Kolter. Optnet: Differentiable optimization as a layer in neural networks. International Conference on Machine Learning, 2017
2017
-
[35]
S. Bai, J. Z. Kolter, and V . Koltun. Deep equilibrium models.Advances in neural information processing systems, 32, 2019
2019
-
[36]
Blondel, Q
M. Blondel, Q. Berthet, M. Cuturi, R. Frostig, S. Hoyer, F. Llinares-L ´opez, F. Pedregosa, and J.-P. Vert. Efficient and modular implicit differentiation.Advances in neural information processing systems, 35:5230–5242, 2022
2022
-
[37]
A. M. Tartakovsky, C. O. Marrero, P. Perdikaris, G. D. Tartakovsky, and D. Barajas-Solano. Physics-informed deep neural networks for learning parameters and constitutive relationships in subsurface flow problems.Water Resources Research, 56(5):e2019WR026731, 2020
2020
-
[38]
bin Waheed, E
U. bin Waheed, E. Haghighat, T. Alkhalifah, C. Song, and Q. Hao. Pinneik: Eikonal solution using physics-informed neural networks.Computers & Geosciences, 155:104833, 2021
2021
-
[39]
D. N. Arnold.Finite element exterior calculus. SIAM, 2018
2018
-
[40]
Trask, A
N. Trask, A. Huang, and X. Hu. Enforcing exact physics in scientific machine learning: a data-driven exterior calculus on graphs.Journal of Computational Physics, 456:110969, 2022
2022
-
[41]
J. A. Actor, X. Hu, A. Huang, S. A. Roberts, and N. Trask. Data-driven whitney forms for structure-preserving control volume analysis.Journal of Computational Physics, 496:112520, 2024
2024
- [42]
-
[43]
B. D. Shaffer, S. Koohy, B. Kinch, M. A. Hsieh, and N. Trask. Structure-preserving learning improves geometry generalization in neural pdes.arXiv preprint arXiv:2602.02788, 2026
Pith/arXiv arXiv 2026
-
[44]
B. D. Shaffer, B. Kinch, M. A. Hsieh, and N. Trask. A meshfree exterior calculus for generaliz- able and data-efficient learning of physics from point clouds.arXiv preprint arXiv:2605.08436, 2026
Pith/arXiv arXiv 2026
-
[45]
B. Shaffer, V . Edwards, B. Kinch, N. Trask, and M. A. Hsieh. Multi-robot multi-source localization in complex flows with physics-preserving environment models.arXiv preprint arXiv:2509.14228, 2025
arXiv 2025
-
[46]
B. D. Shaffer, B. Kinch, J. Klobusicky, M. A. Hsieh, and N. Trask. Physics-informed sensor coverage through structure preserving machine learning.arXiv preprint arXiv:2509.10363, 2025
arXiv 2025
-
[47]
Sharp, S
N. Sharp, S. Attaiki, K. Crane, and M. Ovsjanikov. Diffusionnet: Discretization agnostic learning on surfaces.ACM Transactions on Graphics (ToG), 41(3):1–16, 2022
2022
-
[48]
J. Sun, M. Ovsjanikov, and L. Guibas. A concise and provably informative multi-scale sig- nature based on heat diffusion. InComputer graphics forum, volume 28, pages 1383–1392. Wiley Online Library, 2009
2009
-
[49]
L. C. Evans.Partial differential equations, volume 19. American mathematical society, 2022. 11
2022
-
[50]
M. C. Delfour and J.-P. Zol ´esio.Shapes and Geometries: Metrics, Analysis, Differential Cal- culus, and Optimization. Advances in Design and Control. SIAM, 2 edition, 2011
2011
-
[51]
Pfaff, M
T. Pfaff, M. Fortunato, A. Sanchez-Gonzalez, and P. Battaglia. Learning mesh-based simula- tion with graph networks. InInternational Conference on Learning Representations, 2020
2020
-
[52]
Z. Li, N. Kovachki, K. Azizzadenesheli, B. Liu, K. Bhattacharya, A. Stuart, and A. Anandku- mar. Neural operator: Graph kernel network for partial differential equations.arXiv preprint arXiv:2003.03485, 2020
Pith/arXiv arXiv 2003
-
[53]
A. Khan, A. Ribeiro, V . Kumar, and A. G. Francis. Graph neural networks for motion planning. arXiv preprint arXiv:2006.06248, 2020
arXiv 2006
-
[54]
T. Li, D. Ho, C. Li, D. Zhu, C. Wang, and M. Q.-H. Meng. Houseexpo: A large-scale 2d indoor layout dataset for learning-based algorithms on mobile robots. In2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 5839–5846. IEEE, 2020
2020
-
[55]
N. R. Sturtevant. Benchmarks for grid-based pathfinding.IEEE Transactions on Computa- tional Intelligence and AI in Games, 4(2):144–148, 2012
2012
-
[56]
Y . Canzani. Analysis on manifolds via the laplacian.Lecture Notes available at: http://www. math. harvard. edu/canzani/docs/Laplacian. pdf, pages 41–44, 2013
2013
-
[57]
T. Gustafsson and G. D. McBain. scikit-fem: A Python package for finite element assembly. Journal of Open Source Software, 5(52):2369, 2020. doi:10.21105/joss.02369
-
[58]
J. A. Sethian. Fast marching methods.SIAM review, 41(2):199–235, 1999. A Optimal control correspondence For completeness, we summarize the correspondence between the learned desirability PDE and linearly-solvable optimal control (LSOC) [6, 7] for the Dirichlet-enforced goal formulation. For any admissible coefficientsK θ ≻0andc θ ≥0, the policy (4) can be...
1999
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.