Visuotactile and Explicitly Force-Controlled Robotic Ultrasound for Abdominal Volumetric Reconstruction
Pith reviewed 2026-06-28 01:23 UTC · model grok-4.3
The pith
A robotic system replays expert motions with stereo vision and force control to match expert abdominal ultrasound quality and acquire 3D volumes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
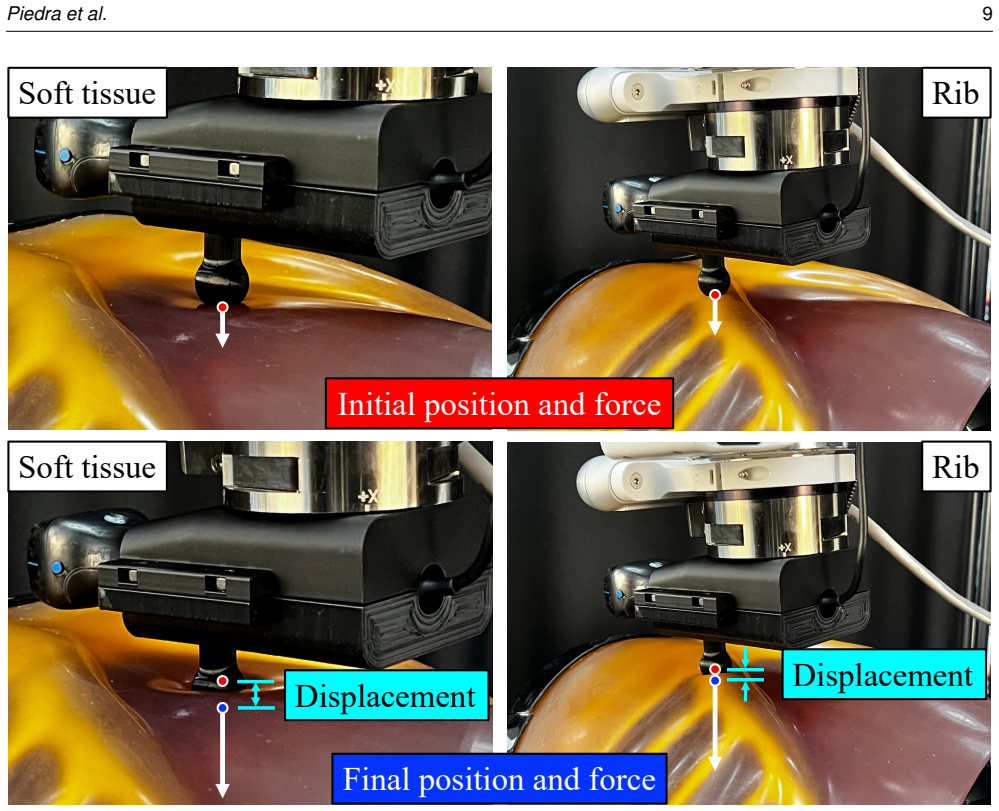
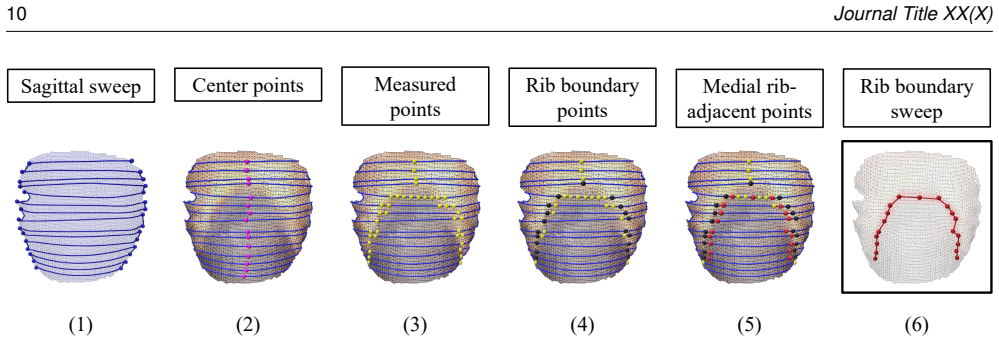
The paper establishes that expert freehand motion and force data, combined with stereo vision for three-dimensional topography maps refined by stiffness measurements at key points to delineate the rib cage, enable a torque-controlled seven degree-of-freedom manipulator to execute adaptive scanning paths with closed-loop force control, achieving high-quality imaging comparable to expert scans and enabling three-dimensional volume acquisition.
What carries the argument
Replayed expert scan paths integrated with stereo vision topography and stiffness-based rib boundary detection, executed under explicit force control on a compliant robotic arm to maintain probe contact on patient-specific surfaces.
If this is right
- The system adapts to patient-specific topographies using vision and stiffness data.
- Image quality matches that of expert manual scans.
- Three-dimensional volumetric data can be acquired, which enhances diagnostic potential.
- The robot can perform scans that surpass expert capabilities in volume capture.
Where Pith is reading between the lines
- Extending the approach to other anatomical regions could broaden robotic ultrasound applications.
- Real-time adjustment based on acquired ultrasound images might further improve scan quality.
- Long-term use could standardize ultrasound procedures across different clinical settings.
- Validation across more varied body types would strengthen evidence for clinical use.
Load-bearing premise
Replaying recorded expert freehand motion and force data combined with vision and stiffness maps produces clinically equivalent scans on varied patient anatomies without further calibration or safety measures.
What would settle it
Direct comparison of diagnostic outcomes from robotic versus multiple expert human scans on the same diverse patient group, where inferior or unsafe robotic results would disprove the claim.
Figures
















read the original abstract
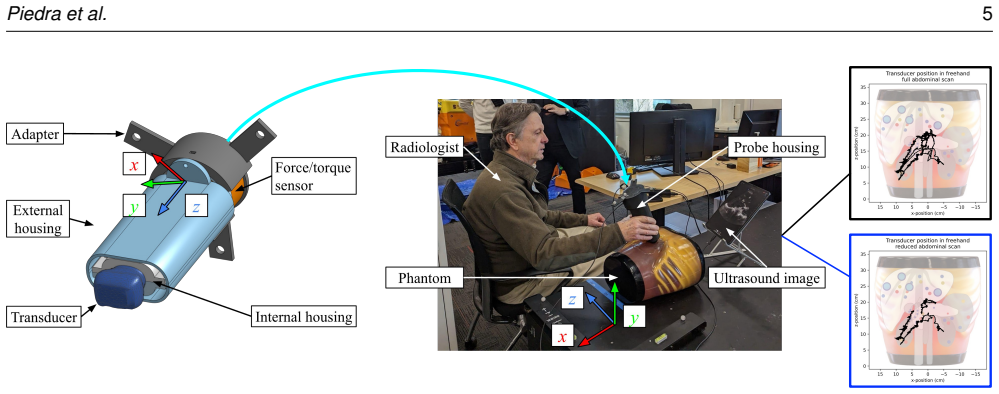
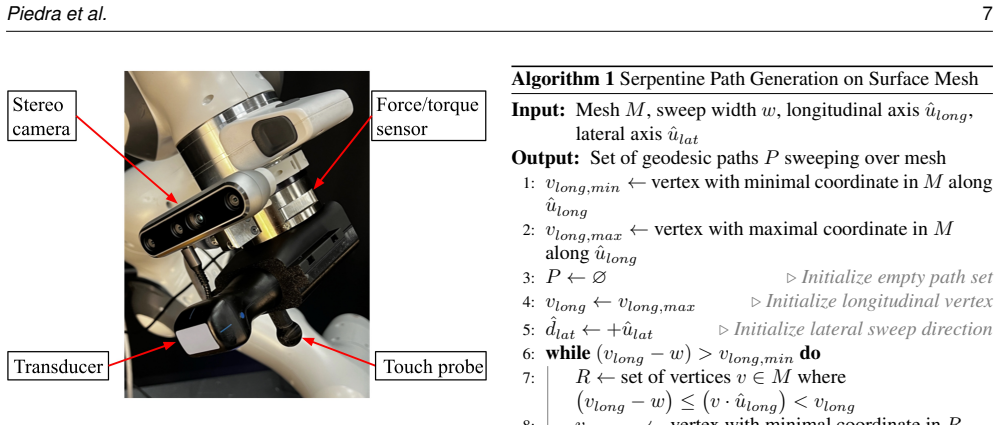
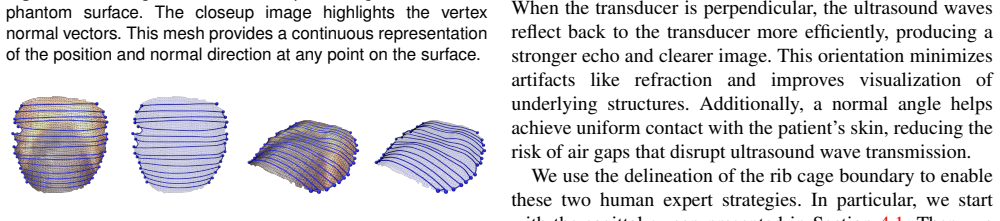
In this paper, we present a robotic ultrasound acquisition system that integrates stereo vision, touch-based feedback, and expert-informed strategies to perform autonomous and adaptive abdominal scans. The system records freehand motion and force data from expert radiologists, creating a framework to capture transducer motion, applied forces, and anatomical scanning strategies. This expert data is replayed to replicate characteristic scans with the robot, forming a foundation for further autonomous capabilities. Using stereo vision, the system generates three-dimensional topography maps of the patient's abdomen, which are refined through stiffness measurements at key points to delineate the rib cage boundary. These combined techniques enable the robot to execute two distinct scanning paths: an upward-angled sweep beneath the rib cage to visualize structures near the upper abdomen and a perpendicular sweep across soft tissue regions. A compliant, torque-controlled seven degree-of-freedom robotic manipulator is controlled to maintain consistent probe contact through closed-loop force control over the varied anatomical surfaces. Physical experiments demonstrate that the system achieves high-quality imaging comparable to expert scans while dynamically adapting to patient-specific topographies. Furthermore, the robotic system surpasses expert capabilities by enabling three-dimensional volume acquisition, which enhances diagnostic potential and provides volumetric data for advanced analyses. This work highlights the integration of expert knowledge into autonomous robotic systems and underscores the potential of combining perception-based autonomy with physical reasoning for enhanced diagnostic performance.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper describes a robotic ultrasound system for abdominal scanning that records and replays expert freehand motion/force trajectories, uses stereo vision to build 3D topography maps, incorporates discrete stiffness measurements to delineate the rib cage, selects between two fixed scanning paths (upward-angled beneath ribs or perpendicular soft-tissue), and employs closed-loop torque control on a 7-DoF manipulator to maintain contact force. Physical experiments are asserted to demonstrate image quality comparable to experts plus the ability to acquire 3D volumes that surpass expert freehand capabilities.
Significance. If the experimental validation holds with quantitative support, the hybrid expert-replay plus perception-based path selection and force control could provide a practical route to consistent, adaptive robotic ultrasound that enables volumetric reconstruction not feasible in standard freehand practice.
major comments (2)
- [Abstract] Abstract: the central claim that 'physical experiments demonstrate that the system achieves high-quality imaging comparable to expert scans' supplies no quantitative image-quality metrics, statistical comparisons, error bars, patient numbers, or exclusion criteria. Without these, the performance assertions rest on unverified statements.
- [Methods] Methods / scanning-path description: adaptation is limited to binary selection between two fixed replayed trajectories based on rib-cage boundary from stereo topography plus discrete stiffness points; no mechanism is stated for continuously warping the expert trajectory or force profile to the measured surface geometry. This directly affects the 'dynamically adapting to patient-specific topographies' claim.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below and indicate where revisions will be made.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that 'physical experiments demonstrate that the system achieves high-quality imaging comparable to expert scans' supplies no quantitative image-quality metrics, statistical comparisons, error bars, patient numbers, or exclusion criteria. Without these, the performance assertions rest on unverified statements.
Authors: We agree the abstract lacks quantitative detail. The experimental results section reports image-quality metrics, statistical comparisons to expert scans, standard deviations, and the number of subjects and scans performed. We will revise the abstract to include these quantitative elements and patient details. revision: yes
-
Referee: [Methods] Methods / scanning-path description: adaptation is limited to binary selection between two fixed replayed trajectories based on rib-cage boundary from stereo topography plus discrete stiffness points; no mechanism is stated for continuously warping the expert trajectory or force profile to the measured surface geometry. This directly affects the 'dynamically adapting to patient-specific topographies' claim.
Authors: The system adapts by using stereo topography and stiffness data to select between the two expert trajectories and then applies closed-loop torque control to maintain contact force and orientation on the actual surface. This provides real-time dynamic response to geometry without continuous trajectory warping. We will revise the methods section to clarify the exact adaptation mechanism and adjust the wording of the 'dynamically adapting' claim to match the implemented approach. revision: partial
Circularity Check
No circularity: experimental system demonstration
full rationale
The paper describes a robotic ultrasound acquisition system that records and replays expert freehand motion/force data, uses stereo vision and stiffness measurements for path selection (two fixed scanning paths), and employs closed-loop torque control for contact force. No mathematical derivations, equations, fitted parameters, predictions, or self-citations appear in the abstract or described content. Central claims rest on physical experiments comparing image quality to expert scans, with no load-bearing steps that reduce by construction to inputs or prior self-work. This is a standard experimental demonstration whose validity depends on external trials rather than internal definitions.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
A Unified Approach for Motion and Force Control of Robot Manipulators: The Operational Space Formulation , volume =
Oussama Khatib , doi =. A Unified Approach for Motion and Force Control of Robot Manipulators: The Operational Space Formulation , volume =. IEEE Journal on Robotics and Automation , pages =
-
[2]
Local Autonomy-Based Haptic-Robot Interaction With Dual-Proxy Model , year =
Mikael Jorda and Margot Vulliez and Oussama Khatib , doi =. Local Autonomy-Based Haptic-Robot Interaction With Dual-Proxy Model , year =. IEEE Transactions on Robotics , keywords =
-
[3]
Optimization of ultrasound image quality via visual servoing , volume =
Pierre Chatelain and Alexandre Krupa and Nassir Navab , doi =. Optimization of ultrasound image quality via visual servoing , volume =. Proceedings - IEEE International Conference on Robotics and Automation , pages =
-
[4]
Contreras Ortiz and Tsuicheng Chiu and Martin D
Sonia H. Contreras Ortiz and Tsuicheng Chiu and Martin D. Fox , doi =. Ultrasound image enhancement: A review , volume =. Biomedical Signal Processing and Control , keywords =
-
[5]
Interface design and control strategies for a robot assisted ultrasonic examination system , volume =
François Conti and Jaeheung Park and Oussama Khatib , doi =. Interface design and control strategies for a robot assisted ultrasonic examination system , volume =. Springer Tracts in Advanced Robotics , pages =
-
[6]
Salcudean and Wen Hong Zhu and Mohammad Reza Sirouspour and Simon P
Purang Abolmaesumi and Septimiu E. Salcudean and Wen Hong Zhu and Mohammad Reza Sirouspour and Simon P. DiMaio , doi =. Image-guided control of a robot for medical ultrasound , volume =. IEEE Transactions on Robotics and Automation , keywords =
-
[7]
A Review on Real-Time 3D Ultrasound Imaging Technology , volume =
Qinghua Huang and Zhaozheng Zeng , doi =. A Review on Real-Time 3D Ultrasound Imaging Technology , volume =. BioMed Research International , pmid =
-
[8]
Blake and Toril A
Ole Vegard Solberg and Frank Lindseth and Hans Torp and Richard E. Blake and Toril A. Nagelhus Hernes , doi =. Freehand 3D Ultrasound Reconstruction Algorithms—A Review , volume =. Ultrasound in Medicine & Biology , keywords =
-
[9]
Non-rigid registration of 3D ultrasound for neurosurgery using automatic feature detection and matching , volume =
Inês Machado and Matthew Toews and Jie Luo and Prashin Unadkat and Walid Essayed and Elizabeth George and Pedro Teodoro and Herculano Carvalho and Jorge Martins and Polina Golland and Steve Pieper and Sarah Frisken and Alexandra Golby and William Wells , doi =. Non-rigid registration of 3D ultrasound for neurosurgery using automatic feature detection and ...
-
[10]
Levinson , doi =
Fai Yeung and Stephen F. Levinson , doi =. Feature-adaptive motion tracking of ultrasound image sequences using a deformable mesh , volume =. IEEE Transactions on Medical Imaging , keywords =
-
[11]
Sebastian Grassia , doi =
F. Sebastian Grassia , doi =. Practical Parameterization of Rotations Using the Exponential Map , volume =. Journal of Graphics Tools , pages =
-
[12]
On-Line Trajectory Generation in Robotic Systems: Basic Concepts for Instantaneous Reactions to Unforeseen (Sensor) Events , volume =
Torsten Kröger , doi =. On-Line Trajectory Generation in Robotic Systems: Basic Concepts for Instantaneous Reactions to Unforeseen (Sensor) Events , volume =. Springer Tracts in Advanced Robotics , pages =
-
[13]
Pieper and Kirby G
Ron Kikinis and Steve D. Pieper and Kirby G. Vosburgh , doi =. 3D Slicer: A Platform for Subject-Specific Image Analysis, Visualization, and Clinical Support , year =. Intraoperative Imaging and Image-Guided Therapy , pages =
-
[14]
Approximate partitioned method of snapshots for POD , volume =
Zhu Wang and Brian McBee and Traian Iliescu , doi =. Approximate partitioned method of snapshots for POD , volume =. Journal of Computational and Applied Mathematics , keywords =
-
[15]
Resolving the sign ambiguity in the singular value decomposition
Rasmus Bro and Evrim Acar and Tamara Gibson Kolda , city =. Resolving the sign ambiguity in the singular value decomposition. , year =. doi:10.2172/920802 , institution =
-
[16]
Kunisch and S
K. Kunisch and S. Volkwein , doi =. Control of the Burgers equation by a reduced-order approach using proper orthogonal decomposition , volume =. Journal of Optimization Theory and Applications , keywords =
-
[17]
Senthilkumar and M
V. Senthilkumar and M. Ezhilarasi , doi =. An efficient multi-RVM classification-based ultrasound lung image retrieval approach , volume =. International Journal of Biomedical Engineering and Technology , keywords =
-
[18]
Nearest neighbor retrieval using distance-based hashing , year =
Vassilis Athitsos and Michalis Potamias and Panagiotis Papapetrou and George Kollios , doi =. Nearest neighbor retrieval using distance-based hashing , year =. Proceedings - International Conference on Data Engineering , pages =
-
[19]
Gradient response maps for real-time detection of textureless objects , volume =
Stefan Hinterstoisser and Cedric Cagniart and Slobodan Ilic and Peter Sturm and Nassir Navab and Pascal Fua and Vincent Lepetit , doi =. Gradient response maps for real-time detection of textureless objects , volume =. IEEE Transactions on Pattern Analysis and Machine Intelligence , keywords =
-
[20]
Badino and D
H. Badino and D. Huber and Y. Park and T. Kanade , doi =. Fast and accurate computation of surface normals from range images , year =. Proceedings - IEEE International Conference on Robotics and Automation , pages =
-
[21]
Hugh B Morgenbesser and Mandayam A Srinivasan and Hugh Brian Morgenbesser , title =
-
[22]
Reconstruction and Representation of 3D Objects with Radial Basis Functions , year =
J C Carr and ½¾ R K Beatson and J B Cherrie and ½ T J Mitchell and ½¾ W R Fright and ½ B C Mccallum and ½ T R Evans , isbn =. Reconstruction and Representation of 3D Objects with Radial Basis Functions , year =
-
[23]
Kobbelt , doi =
Mark Pauly and Markus Gross and Leif P. Kobbelt , doi =. Efficient simplification of point-sampled surfaces , year =. Proceedings of the IEEE Visualization Conference , pages =
-
[24]
You Can Find Geodesic Paths in Triangle Meshes by Just Flipping Edges , volume =
Nicholas Sharp and Keenan Crane , doi =. You Can Find Geodesic Paths in Triangle Meshes by Just Flipping Edges , volume =. ACM Trans. Graph , keywords =
-
[25]
Hugues Hoppe and Tony Derose and Tom Duchamp and John Mcdonald and Werner Stuetzle , keywords =
-
[26]
Intrinsic shape signatures: A shape descriptor for 3D object recognition , year =
Zhong Yu , doi =. Intrinsic shape signatures: A shape descriptor for 3D object recognition , year =. 2009 IEEE 12th International Conference on Computer Vision Workshops, ICCV Workshops 2009 , pages =
2009
-
[27]
As-Rigid-As-Possible Surface Modeling , year =
Olga Sorkine and Marc Alexa and T U Berlin , journal =. As-Rigid-As-Possible Surface Modeling , year =
-
[28]
Poisson Surface Reconstruction , year =
Michael Kazhdan and Matthew Bolitho and Hugues Hoppe , journal =. Poisson Surface Reconstruction , year =
-
[29]
Real-Time Vision-Based Stiffness Mapping † , volume =
Angela Faragasso and João Bimbo and Agostino Stilli and Helge Arne Wurdemann and Kaspar Althoefer and Hajime Asama , doi =. Real-Time Vision-Based Stiffness Mapping † , volume =. Sensors 2018, Vol. 18, Page 1347 , keywords =
2018
-
[30]
C. W. Kennedy and J. P. Desai , doi =. A vision-based approach for estimating contact forces: Applications to robot-assisted surgery , volume =. Applied Bionics and Biomechanics , month =
-
[31]
Shape-Reconstruction-Based Force Sensing Method for Continuum Surgical Robots with Large Deformation , volume =
Han Yuan and Philip Wai Yan Chiu and Zheng Li , doi =. Shape-Reconstruction-Based Force Sensing Method for Continuum Surgical Robots with Large Deformation , volume =. IEEE Robotics and Automation Letters , keywords =
-
[32]
Contact impedance estimation for robotic systems , volume =
Nicola Diolaiti and Claudio Melchiorri and Stefano Stramigioli , doi =. Contact impedance estimation for robotic systems , volume =. IEEE Transactions on Robotics , keywords =
-
[33]
Coutinho and R
F. Coutinho and R. Cortesão , doi =. Online stiffness estimation for robotic tasks with force observers , volume =. Control Engineering Practice , keywords =
-
[34]
Hand-Eye Calibration Using Dual Quaternions , volume =
Konstantinos Daniilidis , doi =. Hand-Eye Calibration Using Dual Quaternions , volume =. http://dx.doi.org/10.1177/02783649922066213 , month =
-
[35]
Alba Perez and J. M. McCarthy , doi =. Dual Quaternion Synthesis of Constrained Robotic Systems , volume =. Journal of Mechanical Design , keywords =
-
[36]
Recent advances in point-of-care ultrasound using the imfusion suite for real-time image analysis , volume =
Oliver Zettinig and Mehrdad Salehi and Raphael Prevost and Wolfgang Wein , doi =. Recent advances in point-of-care ultrasound using the imfusion suite for real-time image analysis , volume =. Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics) , pages =
-
[37]
Salcudean and Nassir Navab , doi =
Zhongliang Jiang and Septimiu E. Salcudean and Nassir Navab , doi =. Robotic ultrasound imaging: State-of-the-art and future perspectives , volume =. Medical Image Analysis , keywords =
-
[38]
Autonomous ultrasound scanning robotic system based on human posture recognition and image servo control: an application for cardiac imaging , volume =
Xiuhong Tang and Hongbo Wang and Jingjing Luo and Jinlei Jiang and Fan Nian and Lizhe Qi and Lingfeng Sang and Zhongxue Gan , doi =. Autonomous ultrasound scanning robotic system based on human posture recognition and image servo control: an application for cardiac imaging , volume =. Frontiers in robotics and AI , keywords =
-
[39]
Open3D: A Modern Library for 3D Data Processing , year =
Qian-Yi Zhou and Jaesik Park and Vladlen Koltun , month =. Open3D: A Modern Library for 3D Data Processing , year =
-
[40]
Compliant Joint Based Robotic Ultrasound Scanning System for Imaging Human Spine , volume =
Yunjiang Wang and Tianjian Liu and Xinben Hu and Keji Yang and Yongjian Zhu and Haoran Jin , doi =. Compliant Joint Based Robotic Ultrasound Scanning System for Imaging Human Spine , volume =. IEEE Robotics and Automation Letters , keywords =
-
[41]
Machine Learning in Robotic Ultrasound Imaging: Challenges and Perspectives , volume =
Yuan Bi and Zhongliang Jiang and Felix Duelmer and Dianye Huang and Nassir Navab , doi =. Machine Learning in Robotic Ultrasound Imaging: Challenges and Perspectives , volume =. Annu. Rev. Control. Robotics Auton. Syst. , keywords =
-
[42]
Meng , doi =
Keyu Li and Yangxin Xu and Max Q.H. Meng , doi =. An Overview of Systems and Techniques for Autonomous Robotic Ultrasound Acquisitions , volume =. IEEE Transactions on Medical Robotics and Bionics , keywords =
-
[43]
Remote Ultrasound Scan Procedures with Medical Robots: Towards New Perspectives between Medicine and Engineering , volume =
Maide Bucolo and Gea Bucolo and Arturo Buscarino and Agata Fiumara and Luigi Fortuna and Salvina Gagliano , doi =. Remote Ultrasound Scan Procedures with Medical Robots: Towards New Perspectives between Medicine and Engineering , volume =. Applied Bionics and Biomechanics , publisher =
-
[44]
Christoforou and Andreas S
Sotiris Avgousti and Eftychios G. Christoforou and Andreas S. Panayides and Sotos Voskarides and Cyril Novales and Laurence Nouaille and Constantinos S. Pattichis and Pierre Vieyres , doi =. Medical telerobotic systems: current status and future trends , volume =. BioMedical Engineering OnLine , keywords =
-
[45]
Compliance Control for Robot Manipulation in Contact with a Varied Environment Based on a New Joint Torque Controller , volume =
Yunfei Dong and Tianyu Ren and Dan Wu and Ken Chen , doi =. Compliance Control for Robot Manipulation in Contact with a Varied Environment Based on a New Joint Torque Controller , volume =. Journal of Intelligent and Robotic Systems , keywords =
-
[46]
Rodriguez-Andina and Huijun Gao , doi =
Yongqing Fu and Weiyang Lin and Xinghu Yu and Juan J. Rodriguez-Andina and Huijun Gao , doi =. Robot-Assisted Teleoperation Ultrasound System Based on Fusion of Augmented Reality and Predictive Force , volume =. IEEE Transactions on Industrial Electronics , keywords =
-
[47]
Design and Quantitative Assessment of Teleoperation-Based Human–Robot Collaboration Method for Robot-Assisted Sonography , year =
Weiyong Si and Ning Wang and Chenguang Yang , doi =. Design and Quantitative Assessment of Teleoperation-Based Human–Robot Collaboration Method for Robot-Assisted Sonography , year =. IEEE Transactions on Automation Science and Engineering , keywords =
-
[48]
Development of a Robotic Ultrasound System to Assist Ultrasound Examination of Pregnant Women , volume =
Maria Bamaarouf and Flavien Paccot and Laurent Sarry and Hélène Chanal , doi =. Development of a Robotic Ultrasound System to Assist Ultrasound Examination of Pregnant Women , volume =. IEEE Transactions on Medical Robotics and Bionics , keywords =
-
[49]
Saha and S
Deepak Raina and Ziming Zhao and Richard Voyles and Juan Wachs and Subir K. Saha and S. H. Chandrashekhara , doi =. UltraGelBot: Autonomous Gel Dispenser for Robotic Ultrasound , year =. ArXiv , pages =
-
[50]
Zhang , doi =
Wen Yi Kuo and Xihan Ma and Dhirajsinh Deshmukh and Haichong K. Zhang , doi =. Automatic Contact Force-regulated End-effector Using Pneumatic Actuator for Safe Robotic Ultrasound Imaging , year =. International Symposium on Medical Robotics , publisher =
-
[51]
Shyam and Aparna Purayath and S
A. Shyam and Aparna Purayath and S. Keerthivasan and S. M. Akash and Aswathaman Govindaraju and Manojkumar Lakshmanan and Mohanasankar Sivaprakasam , doi =. Immersive Virtual Reality Platform for Robot-Assisted Antenatal Ultrasound Scanning , year =. IEEE International Symposium on Robot and Human Interactive Communication , pages =
-
[52]
Computed-Torque Control for Robotic-Assisted Tele-Echography Based on Perceived Stiffness Estimation , volume =
Luis Santos and Rui Cortesao , doi =. Computed-Torque Control for Robotic-Assisted Tele-Echography Based on Perceived Stiffness Estimation , volume =. IEEE Transactions on Automation Science and Engineering , keywords =
-
[53]
Medical Robotics for Ultrasound Imaging: Current Systems and Future Trends , volume =
Felix von Haxthausen and Sven Böttger and Daniel Wulff and Jannis Hagenah and Verónica García-Vázquez and Svenja Ipsen , doi =. Medical Robotics for Ultrasound Imaging: Current Systems and Future Trends , volume =. Current robotics reports , keywords =
-
[54]
Design and Calibration of a Joint Torque Sensor for Robot Compliance Control , volume =
Bing Fu and Ganwei Cai , doi =. Design and Calibration of a Joint Torque Sensor for Robot Compliance Control , volume =. IEEE Sensors Journal , keywords =
-
[55]
Pacific Symposium on Biocomputing , title =
Grant Duffy and Kai Christensen and David Ouyang , doi =. Pacific Symposium on Biocomputing , title =
-
[56]
Salinaro and Patricia J
Julia R. Salinaro and Patricia J. McNally and Joao R. Nickenig Vissoci and Sarah C. Ellestad and Brian Nelson and Joshua S. Broder , doi =. Journal of Maternal-Fetal and Neonatal Medicine , title =
-
[57]
Satvika Bharadwaj and Komal Shah and Yifan Zhao and Aparna Harindranath and Arun George and Kajoli Krishnan and Manish Arora , doi =. Semi-blinded freehand 3D ultrasound with novice users from Indian Institute of Science, National Institute of Advanced Studies, Cranfield University and St.John's Medical College Hospital , year =
-
[58]
Torres and Bruno Oliveira and João Gomes-Fonseca and L
Simao Valente and Pedro Morais and Helena R. Torres and Bruno Oliveira and João Gomes-Fonseca and L. R. Buschle and A. Fritz and Jorge Correia-Pinto and Estevão Lima and João L. Vilaça , doi =. Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS , title =
-
[59]
Brooke Jeffrey and Oussama Khatib , doi =
Adrian Piedra and R. Brooke Jeffrey and Oussama Khatib , doi =. Robotic Ultrasound Imaging with Haptic Guidance and Human Expert Strategies , volume =. Springer Proceedings in Advanced Robotics , pages =
-
[60]
Proceedings - International Conference on Data Engineering : 327--336doi:10.1109/ICDE.2008.4497441
Athitsos V, Potamias M, Papapetrou P and Kollios G (2008) Nearest neighbor retrieval using distance-based hashing. Proceedings - International Conference on Data Engineering : 327--336doi:10.1109/ICDE.2008.4497441
-
[61]
IEEE Transactions on Medical Robotics and Bionics 6: 796--805
Bamaarouf M, Paccot F, Sarry L and Chanal H (2024) Development of a robotic ultrasound system to assist ultrasound examination of pregnant women. IEEE Transactions on Medical Robotics and Bionics 6: 796--805. doi:10.1109/TMRB.2024.3387047
-
[62]
Bharadwaj S, Shah K, Zhao Y, Harindranath A, George A, Krishnan K and Arora M (2022) Semi-blinded freehand 3d ultrasound with novice users from indian institute of science, national institute of advanced studies, cranfield university and st.john's medical college hospital. doi:10.1117/12.2610969
-
[63]
Bi Y, Jiang Z, Duelmer F, Huang D and Navab N (2024) Machine learning in robotic ultrasound imaging: Challenges and perspectives. Annu. Rev. Control. Robotics Auton. Syst. 7: 335--357. doi:10.1146/ANNUREV-CONTROL-091523-100042
-
[64]
Proceedings - IEEE International Conference on Robotics and Automation 2015-June: 5997--6002
Chatelain P, Krupa A and Navab N (2015) Optimization of ultrasound image quality via visual servoing. Proceedings - IEEE International Conference on Robotics and Automation 2015-June: 5997--6002. doi:10.1109/ICRA.2015.7140040
-
[65]
Springer Tracts in Advanced Robotics 79: 97--113
Conti F, Park J and Khatib O (2014) Interface design and control strategies for a robot assisted ultrasonic examination system. Springer Tracts in Advanced Robotics 79: 97--113. doi:10.1007/978-3-642-28572-1_7/COVER
-
[66]
In: Pacific Symposium on Biocomputing
Duffy G, Christensen K and Ouyang D (2024) Leveraging 3d echocardiograms to evaluate ai model performance in predicting cardiac function on out-of-distribution data. In: Pacific Symposium on Biocomputing. doi:10.1142/9789811286421_0004
-
[67]
IEEE Sensors Journal 21: 21378--21389
Fu B and Cai G (2021) Design and calibration of a joint torque sensor for robot compliance control. IEEE Sensors Journal 21: 21378--21389. doi:10.1109/JSEN.2021.3104351
-
[68]
IEEE Transactions on Industrial Electronics 70: 7449--7456
Fu Y, Lin W, Yu X, Rodriguez-Andina JJ and Gao H (2023) Robot-assisted teleoperation ultrasound system based on fusion of augmented reality and predictive force. IEEE Transactions on Industrial Electronics 70: 7449--7456. doi:10.1109/TIE.2022.3201322
-
[69]
BioMed Research International 2017
Huang Q and Zeng Z (2017) A review on real-time 3d ultrasound imaging technology. BioMed Research International 2017. doi:10.1155/2017/6027029
-
[70]
Medical Image Analysis 89: 102878
Jiang Z, Salcudean SE and Navab N (2023) Robotic ultrasound imaging: State-of-the-art and future perspectives. Medical Image Analysis 89: 102878. doi:10.1016/J.MEDIA.2023.102878
-
[71]
IEEE Transactions on Robotics pp
Jorda M, Vulliez M and Khatib O (2022) Local autonomy-based haptic-robot interaction with dual-proxy model. IEEE Transactions on Robotics doi:10.1109/TRO.2022.3160053
-
[72]
Eurographics Symposium on Geometry Processing
Kazhdan M, Bolitho M and Hoppe H (2006) Poisson surface reconstruction. Eurographics Symposium on Geometry Processing
2006
-
[73]
IEEE Journal on Robotics and Automation 3: 43--53
Khatib O (1987) A unified approach for motion and force control of robot manipulators: The operational space formulation. IEEE Journal on Robotics and Automation 3: 43--53. doi:10.1109/JRA.1987.1087068
-
[74]
Springer Tracts in Advanced Robotics 58: 1--230
Kröger T (2010) On-line trajectory generation in robotic systems: Basic concepts for instantaneous reactions to unforeseen (sensor) events. Springer Tracts in Advanced Robotics 58: 1--230. doi:10.1007/978-3-642-05175-3_1
-
[75]
Journal of Optimization Theory and Applications 102: 345--371
Kunisch K and Volkwein S (1999) Control of the burgers equation by a reduced-order approach using proper orthogonal decomposition. Journal of Optimization Theory and Applications 102: 345--371. doi:10.1023/A:1021732508059/METRICS
-
[76]
International Symposium on Medical Robotics doi:10.1109/ISMR57123.2023.10130200
Kuo WY, Ma X, Deshmukh D and Zhang HK (2023) Automatic contact force-regulated end-effector using pneumatic actuator for safe robotic ultrasound imaging. International Symposium on Medical Robotics doi:10.1109/ISMR57123.2023.10130200
-
[77]
IEEE Transactions on Medical Robotics and Bionics 3: 510--524
Li K, Xu Y and Meng MQ (2021) An overview of systems and techniques for autonomous robotic ultrasound acquisitions. IEEE Transactions on Medical Robotics and Bionics 3: 510--524. doi:10.1109/TMRB.2021.3072190
-
[78]
Machado I, Toews M, Luo J, Unadkat P, Essayed W, George E, Teodoro P, Carvalho H, Martins J, Golland P, Pieper S, Frisken S, Golby A and Wells W (2018) Non-rigid registration of 3d ultrasound for neurosurgery using automatic feature detection and matching. International journal of computer assisted radiology and surgery 13: 1525. doi:10.1007/S11548-018-1786-7
-
[79]
In: Springer Proceedings in Advanced Robotics, volume 30
Piedra A, Jeffrey RB and Khatib O (2024) Robotic ultrasound imaging with haptic guidance and human expert strategies. In: Springer Proceedings in Advanced Robotics, volume 30. Springer Nature, pp. 53--65. doi:10.1007/978-3-031-63596-0_6
-
[80]
ArXiv : 119--120doi:10.31256/HSMR2024.60
Raina D, Zhao Z, Voyles R, Wachs J, Saha SK and Chandrashekhara SH (2024) Ultragelbot: Autonomous gel dispenser for robotic ultrasound. ArXiv : 119--120doi:10.31256/HSMR2024.60
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.