Emergent swimming strategies of a smart three-bead swimmer
Pith reviewed 2026-06-27 22:39 UTC · model grok-4.3
The pith
A three-bead microswimmer learns five swimming gaits with neural networks of under ten nodes and weights.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
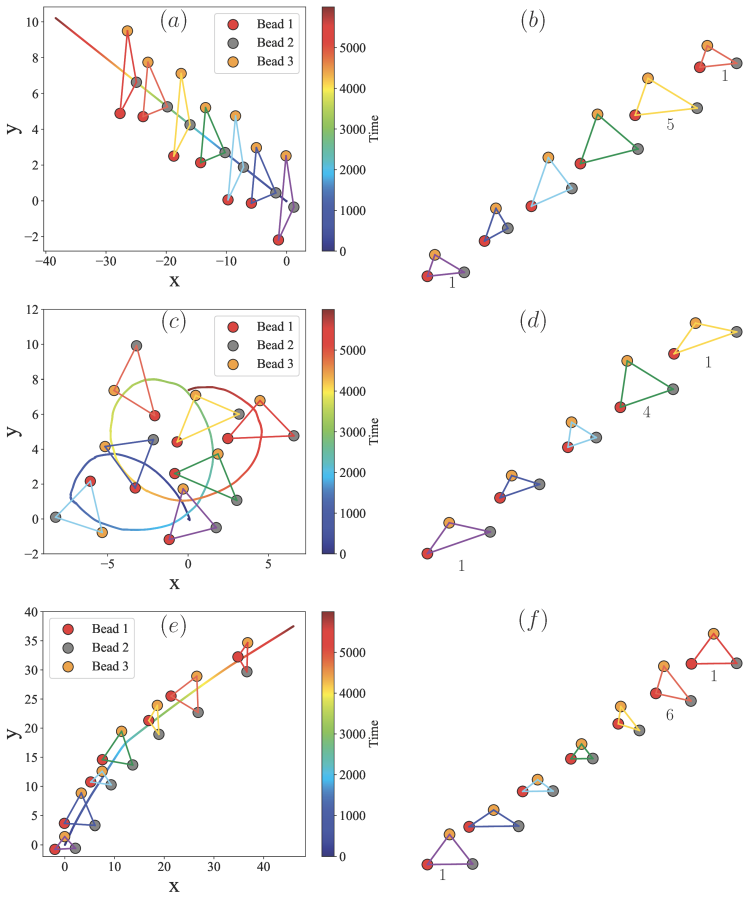
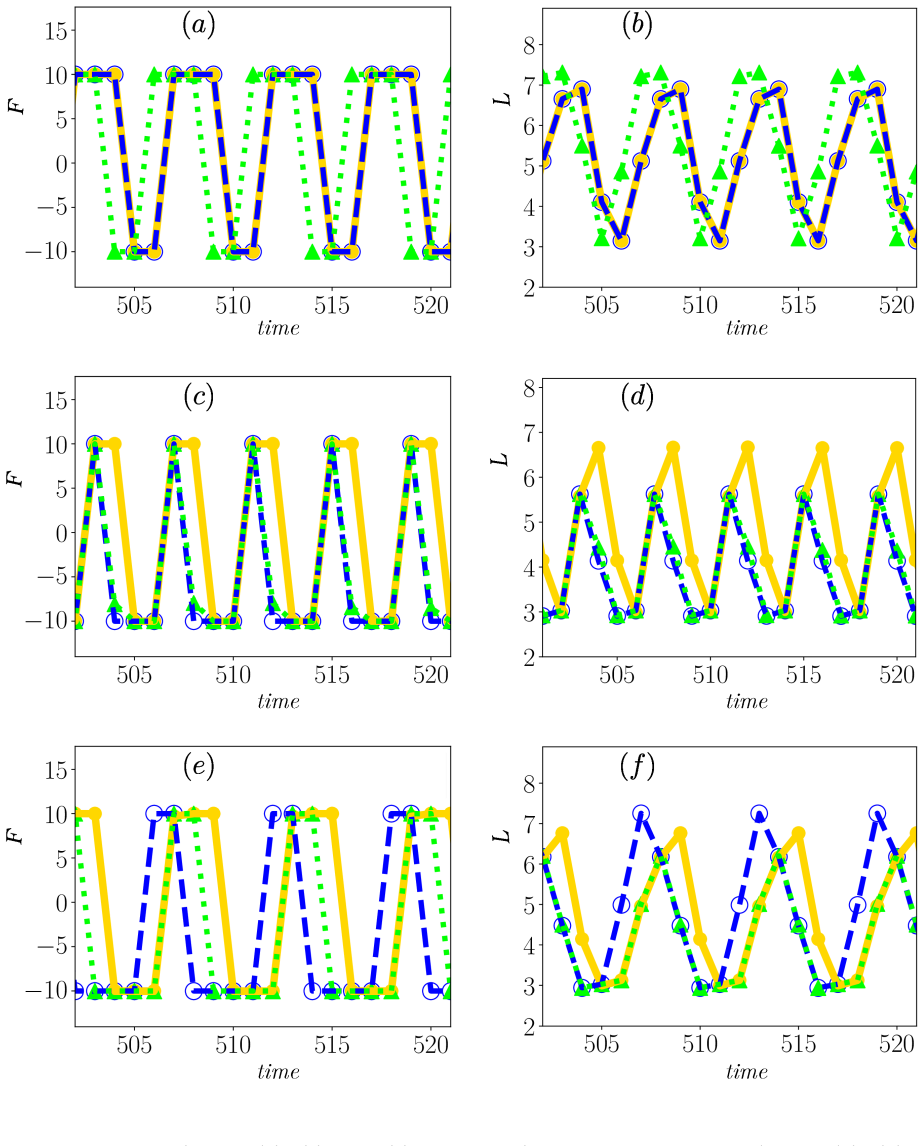
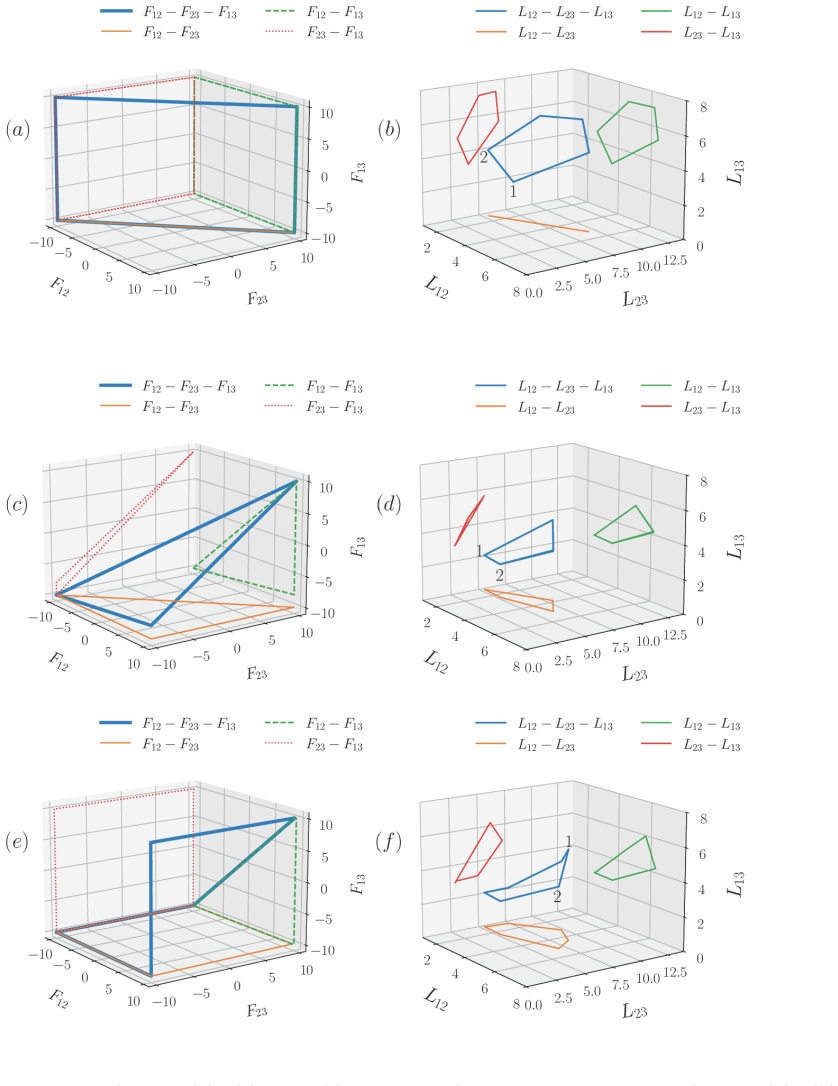
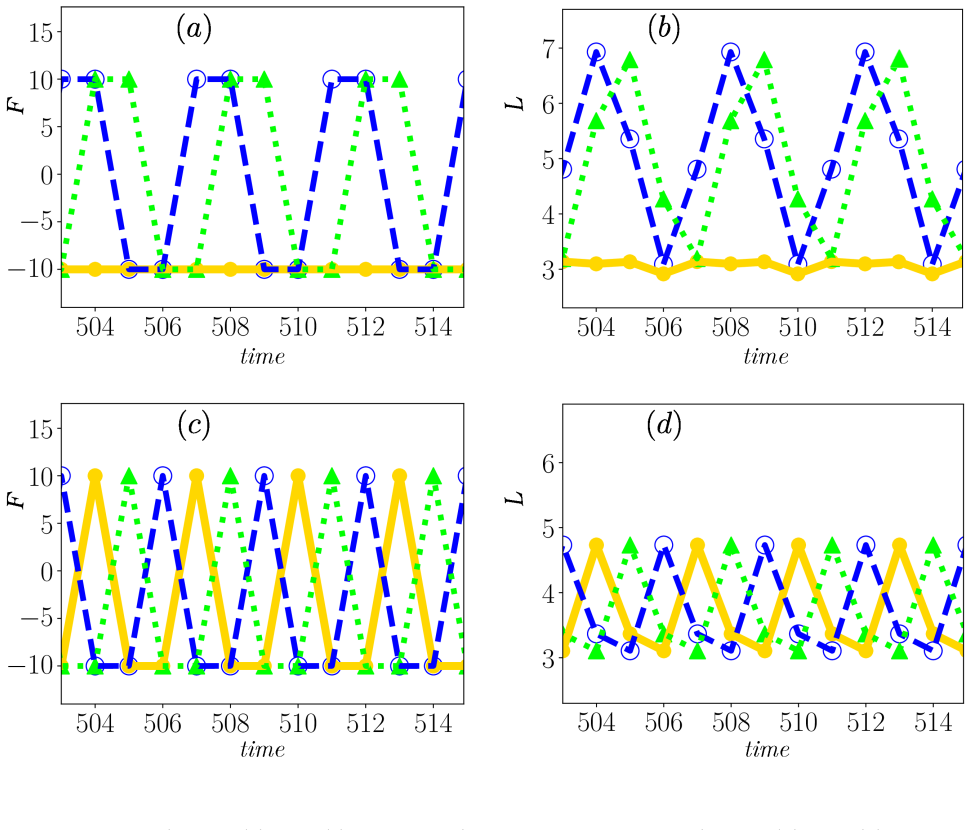
In a two-dimensional hydrodynamic model of a three-bead swimmer, reinforcement learning via neuroevolution produces five characteristic gaits. Three gaits yield directed locomotion of varying efficiency and two gaits produce rotational, inefficient motion. All five gaits are achieved by very simple neural networks containing fewer than ten nodes and weights, indicating that low-Reynolds-number swimming can be performed efficiently and robustly with only minimal computational power.
What carries the argument
Neuroevolution of minimal neural-network controllers for a three-bead low-Reynolds-number swimmer model.
If this is right
- Artificial microswimmers can be made autonomous with very low onboard computation.
- Experimental designs can use simple controllers instead of complex ones for efficient swimming.
- The same minimal models may be applied to understand locomotion in microorganisms such as Chlamydomonas reinhardtii.
Where Pith is reading between the lines
- If the 2D gaits survive in 3D viscous fluids, the approach could guide fabrication of real microswimmers.
- The rotational gaits might serve as built-in reorientation mechanisms in navigation tasks.
- Minimal network size suggests energy savings when the controllers are realized in hardware.
Load-bearing premise
The two-dimensional three-bead hydrodynamic model plus the chosen reward function in the reinforcement learning setup are sufficient to produce strategies that remain effective when transferred to three-dimensional physical experiments or real biological fluids.
What would settle it
Transferring the learned neural controllers to a physical three-bead device in a viscous fluid and checking whether the predicted directed or rotational motions appear.
Figures



read the original abstract
Low-Reynolds-number microswimmers have recently attracted much interest for their ubiquity in biology and their applications in biotechnology and medicine. However, a key obstacle for the design and deployment of artificial microswimmers lies in their autonomy: to successfully perform tasks in any real-world scenario, these swimmers need to be able to interact with and adapt to their environment without external control. Here, we train a simple two-dimensional model microswimmer (consisting of three-bead) to learn autonomous swimming strategies via Reinforcement Learning, focusing on neuroevolution techniques to derive controller architectures with minimal complexity. We identify five different, characteristic swimming gaits: three of these gaits lead to directed locomotion with varying grades of efficiency and two gaits result in a rotational, inefficient movement. Remarkably, all of these gaits can be achieved by very simple neural networks (with less than ten nodes and weights), showing that low-Reynolds-number swimming can be achieved efficiently and robustly while requiring only minimal computational power. These results are of particular interest to the experimental design of artificial microswimmers and may have implications for modeling biological microorganisms such as Chlamydomonas reinhardtii.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper trains a two-dimensional three-bead microswimmer via reinforcement learning and neuroevolution to discover autonomous swimming strategies. It reports the emergence of five characteristic gaits (three directed with varying efficiency, two rotational and inefficient), all realizable by neural networks with fewer than ten nodes and weights, and claims this demonstrates efficient, robust low-Re swimming with minimal computational power, with implications for artificial microswimmer design and biological modeling such as Chlamydomonas reinhardtii.
Significance. If the results hold under scrutiny, the demonstration that minimal-complexity controllers suffice for directed locomotion in the model would be useful for experimental microswimmer engineering and could inform reduced-order models of biological swimmers.
major comments (2)
- [Abstract and §3 (Results)] Abstract and §3 (Results): the central claim that the gaits are achieved 'efficiently and robustly' with '<10 nodes and weights' is presented without any quantitative performance metrics (e.g., mean speed, efficiency, or success rate across runs), baseline comparisons to hand-designed controllers, sensitivity tests on reward parameters, or error bars; this absence makes it impossible to judge whether the reported simplicity is load-bearing or an artifact of the specific training setup.
- [§2 (Model)] §2 (Model): the hydrodynamic interactions are computed in two dimensions, where the mobility tensor exhibits logarithmic far-field decay; this differs qualitatively from the 1/r Stokeslet decay in three-dimensional Stokes flow, so the phase relations, stroke timing, and minimal controller complexity found here may not transfer, yet the manuscript provides no 3D control simulations, no comparison to existing three-bead 3D results, and no experimental transfer test to support the robustness claim for real low-Re swimming.
minor comments (1)
- [Abstract] Abstract: the phrase 'varying grades of efficiency' is used without defining the efficiency metric or providing numerical values for the three directed gaits.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below and indicate planned revisions where appropriate.
read point-by-point responses
-
Referee: [Abstract and §3 (Results)] Abstract and §3 (Results): the central claim that the gaits are achieved 'efficiently and robustly' with '<10 nodes and weights' is presented without any quantitative performance metrics (e.g., mean speed, efficiency, or success rate across runs), baseline comparisons to hand-designed controllers, sensitivity tests on reward parameters, or error bars; this absence makes it impossible to judge whether the reported simplicity is load-bearing or an artifact of the specific training setup.
Authors: We agree that quantitative metrics are needed to support the claims of efficiency and robustness. In the revised manuscript we will add mean swimming speeds and hydrodynamic efficiencies for each of the five gaits, success rates and standard deviations across at least ten independent neuroevolution runs, and a direct comparison of net displacement per cycle against a simple hand-designed three-bead controller with fixed phase lag. A short sensitivity study on the two main reward weights will also be included in the supplementary material. These additions will demonstrate that the minimal-controller result is reproducible and not an artifact of the chosen training protocol. revision: yes
-
Referee: [§2 (Model)] §2 (Model): the hydrodynamic interactions are computed in two dimensions, where the mobility tensor exhibits logarithmic far-field decay; this differs qualitatively from the 1/r Stokeslet decay in three-dimensional Stokes flow, so the phase relations, stroke timing, and minimal controller complexity found here may not transfer, yet the manuscript provides no 3D control simulations, no comparison to existing three-bead 3D results, and no experimental transfer test to support the robustness claim for real low-Re swimming.
Authors: The work is explicitly framed as a two-dimensional model study chosen to enable exhaustive neuroevolution searches at modest computational cost. While we acknowledge that 2D logarithmic hydrodynamics differ from 3D Stokes flow, the central finding—that directed low-Re locomotion can be realized by neural networks with fewer than ten parameters—remains a general proof-of-principle that does not rely on the precise far-field decay. We will revise the discussion section to state the 2D limitation more explicitly and to moderate claims about immediate transfer to three-dimensional or biological systems. Full 3D neuroevolution and experimental validation lie outside the scope of the present manuscript. revision: partial
Circularity Check
No circularity; results emerge from independent RL training process
full rationale
The paper trains neural network controllers via reinforcement learning on a 2D three-bead Stokes model to produce swimming gaits. The reported gaits and the finding that networks with fewer than ten nodes/weights suffice are direct outputs of the training runs, not quantities defined by or fitted to the same data in a self-referential loop. No equations, self-citations, or ansatzes are quoted that reduce the central claims to inputs by construction. The derivation chain is therefore self-contained against external benchmarks such as the RL simulator itself.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption A two-dimensional three-bead hydrodynamic model captures the essential physics needed to discover functional swimming strategies.
Reference graph
Works this paper leans on
-
[1]
Purcell, E. M. Life at low Reynolds number.Am. J. Phys.45, 3-11 (1977)
1977
-
[2]
Desai, N., Shaik, V. A. and Ardekani, A. M. Hydrodynamics-mediated trapping of micro- swimmers near drops.Soft matter14(2), 264-278 (2018)
2018
-
[3]
and Pedley, T
Magar, V., Goto, T. and Pedley, T. J. Nutrient uptake by a self-propelled steady squirmer. Q. J. Mech. Appl. Math.,56(1), 65-91 (2003)
2003
-
[4]
The mechanics and statistics of active matter.Annu
Ramaswamy, S. The mechanics and statistics of active matter.Annu. Rev. Condens. Matter Phys.1(1), 323-345 (2010)
2010
-
[5]
Waggett, R. J. and Buskey, E. J. Calanoid copepod escape behavior in response to a visual predator.Mar. Biol.150, 599-607 (2007)
2007
-
[6]
The mechanics of amphibian locomotion.J
Barclay, O.R. The mechanics of amphibian locomotion.J. Exp. Biol.23(2), 177-203 (1946)
1946
-
[7]
and Seymour, J
Stocker, R. and Seymour, J. R. Ecology and physics of bacterial chemotaxis in the ocean. Microbiol. Mol. Biol.,76(4), 792-812 (2012)
2012
-
[8]
Elgeti, J., Winkler, R. G. and Gompper, G. Physics of microswimmers—single particle motion and collective behavior: a review.Rep. Prog. Phys.78(5), 056601 (2015)
2015
-
[9]
L., Fermigier, M., Stone, H
Dreyfus, R., Baudry, J., Roper, M. L., Fermigier, M., Stone, H. A. and Bibette, J. Microscopic artificial swimmers.Nature437(7060), 862-865 (2005)
2005
-
[10]
S., Gao, W., Wang, J
Pak, O. S., Gao, W., Wang, J. and Lauga, E. High-speed propulsion of flexible nanowire motors: Theory and experiments.Soft Matter7(18), 8169-8181 (2011)
2011
-
[11]
M., Gompper, G
Alvarez, L., Friedrich, B. M., Gompper, G. and Kaupp, U. B. The computational sperm cell. Trends Cell Biol.24(3), 198-207 (2014)
2014
-
[12]
Elgeti, J., Kaupp, U. B. and Gompper, G. Hydrodynamics of sperm cells near surfaces.Bio- phys. J.99(4), 1018-1026 (2010)
2010
-
[13]
Berg, H. C. E. coli in Motion (Springer Science and Business Media, New York, 2008)
2008
-
[14]
and Baroud, C
Hamel, A., Fisch, C., Combettes, L., Dupuis-Williams, P. and Baroud, C. N. Transitions between three swimming gaits in Paramecium escape.Proc. Natl. Acad. Sci. U.S. A.108(18), 25 7290-7295 (2011)
2011
-
[15]
Blake, J. R. and Sleigh, M. A. Mechanics of ciliary locomotion.Biol. Rev.49(1), 85-125 (1974)
1974
-
[16]
Taylor, G. I. Analysis of the swimming of microscopic organisms.Proc. R. Soc. A: Math. Phys. Eng. Sci.209(1099), 447-461 (1951)
1951
-
[17]
Lighthill, M. J. On the squirming motion of nearly spherical deformable bodies through liquids at very small Reynolds numbers.Commun. Pure Appl. Math.5(2), 109-118 (1952)
1952
-
[18]
Blake, J. R. A spherical envelope approach to ciliary propulsion.J. Fluid Mech.46(1), 199-208 (1971)
1971
-
[19]
and Golestanian, R
Najafi, A. and Golestanian, R. Simple swimmer at low Reynolds number: Three linked spheres. Phys. Rev. E69(6), 062901 (2004)
2004
-
[20]
Johnson, R. E. and Brokaw, C. J. Flagellar hydrodynamics. A comparison between resistive- force theory and slender-body theory.Biophys. J.25(1), 113-127 (1979)
1979
-
[21]
and He, X
Zhao, Y., Xuan, C., Qian, X., Alsaid, Y., Hua, M., Jin, L. and He, X. Soft phototactic swimmer based on self-sustained hydrogel oscillator.Sci. Robot.4(33), eaax7112 (2019)
2019
-
[22]
and Pan, G
Luo, Y., Xiao, Q., Zhu, Q. and Pan, G. Jet propulsion of a squid-inspired swimmer in the presence of background flow.Phys. Fluids.33(3), 031909 (2021)
2021
-
[23]
C., Bae, J., Kim, H., Choi, H., Song, S
Choi, Y., Park, C., Lee, A. C., Bae, J., Kim, H., Choi, H., Song, S. W., Jeong, Y., Choi, J., Lee, H. and Kwon, S. Photopatterned microswimmers with programmable motion without external stimuli.Nat. Commun.12(1), 4724 (2021)
2021
-
[24]
and Thiffeault, J
Chen, H. and Thiffeault, J. L. Shape matters: a Brownian microswimmer in a channel.J. Fluid Mech.916, A15 (2021)
2021
-
[25]
and Komura, S
Era, K., Koyano, Y., Hosaka, Y., Yasuda, K., Kitahata, H. and Komura, S. Autonomous elastic microswimmer.Europhys. Lett.133(3), 34001 (2021)
2021
-
[26]
and Newhall, K
Daftari, K. and Newhall, K. A. Self-avoidant memory effects on enhanced diffusion in a stochastic model of environmentally responsive swimming droplets.Phys. Rev. E105(2), 024609 (2022)
2022
-
[27]
and Celani, A
Borra, F., Biferale, L., Cencini, M. and Celani, A. Reinforcement learning for pursuit and evasion of microswimmers at low Reynolds number.Phys. Rev. Fluids7(2), 023103 (2022)
2022
-
[28]
Kuramoto model with run-and-tumble dynamics.Phys
Frydel, D. Kuramoto model with run-and-tumble dynamics.Phys. Rev. E104(2), 024203 (2021). 26
2021
-
[29]
S., Farutin, A
Rizvi, M. S., Farutin, A. and Misbah, C. Three-bead steering microswimmers.Phys. Rev. E 97(2), 023102 (2018)
2018
-
[30]
and Sen, A
Patra, D., Sengupta, S., Duan, W., Zhang, H., Pavlick, R. and Sen, A. Intelligent, self-powered, drug delivery systems.Nanoscale,5(4), 1273-1283 (2013)
2013
-
[31]
and Fischer, P
Walker, D., K¨ asdorf, B.T., Jeong, H.H., Lieleg, O. and Fischer, P. Enzymatically active biomimetic micropropellers for the penetration of mucin gels.Sci. Adv.,1(11), e1500501- e1500501 (2015)
2015
-
[32]
Small8, 460–467 (2012)
Gao, W.et al.Cargo-towing fuel-free magnetic nanoswimmers for targeted drug delivery. Small8, 460–467 (2012)
2012
-
[33]
and Gracias, D.H
Ghosh, A., Yoon, C., Ongaro, F., Scheggi, S., Selaru, F.M., Misra, S. and Gracias, D.H. Stimuli-responsive soft untethered grippers for drug delivery and robotic surgery.Front. Mech. Eng.,3, 7 (2017)
2017
-
[34]
and Abbott, J.J
Nelson, B.J., Kaliakatsos, I.K. and Abbott, J.J. Microrobots for minimally invasive medicine. Annu. Rev. Biomed. Eng.,12(1), 55-85 (2010)
2010
-
[35]
and Couraud, P.-O
Nassif, X., Bourdoulous, S., Eug` ene, E. and Couraud, P.-O. How do extracellular pathogens cross the blood–brain barrier?Trends Microbiol.,10, 227–232 (2002)
2002
-
[36]
Mirbagheri, S. A. and Fu, H. C. Helicobacter pylori couples motility and diffusion to actively create a heterogeneous complex medium in gastric mucus.Phys. Rev. Lett.116, 198101 (2016)
2016
-
[37]
and Volpe, G
Cichos, F., Gustavsson, K., Mehlig, B. and Volpe, G. Machine learning for active matter.Nat. Mach. Intell.2, 94–103 (2020)
2020
-
[38]
Tsang, A. C. H., Demir, E., Ding, Y. and Pak, O. S. Roads to smart artificial microswimmers. Adv. Intell. Syst.2, 1900137 (2020)
2020
-
[39]
and Tsang, A.C., Learning to cooperate for low-Reynolds-number swimming: a model problem for gait coordination.Sci
Liu, Y., Zou, Z., Pak, O.S. and Tsang, A.C., Learning to cooperate for low-Reynolds-number swimming: a model problem for gait coordination.Sci. Rep.,13(1), 9397 (2023)
2023
-
[40]
and Tsang, A.C., Learning to Navigate in Chemical Fields Without A Map at Low Reynolds Numbers.Adv
Liu, Y., Pak, O.S. and Tsang, A.C., Learning to Navigate in Chemical Fields Without A Map at Low Reynolds Numbers.Adv. Sci.,12(41), e10092 (2025)
2025
-
[41]
and Zhu, L., Chemotactic navigation in robotic swim- mers via reset-free hierarchical reinforcement learning.Nat
Xiong, T., Liu, Z., Wang, Y., Ong, C.J. and Zhu, L., Chemotactic navigation in robotic swim- mers via reset-free hierarchical reinforcement learning.Nat. Commun.,16(1), 5441 (2025)
2025
-
[42]
and Tsang, A.C., Reinforcement learning selects multimodal locomotion strategies for bioinspired microswimmers.Soft Matter,21(12), 2363 (2025)
Liu, Y., Wang, Z. and Tsang, A.C., Reinforcement learning selects multimodal locomotion strategies for bioinspired microswimmers.Soft Matter,21(12), 2363 (2025). 27
2025
-
[43]
and Young, Y.N., Mechanical rotation at low Reynolds number via reinforcement learning.Phys
Liu, Y., Zou, Z., Tsang, A.C.H., Pak, O.S. and Young, Y.N., Mechanical rotation at low Reynolds number via reinforcement learning.Phys. Fluids,33(6) (2021)
2021
-
[44]
Mohamed, O., Tsang, A. C. H, Reinforcement learning of biomimetic navigation: a model problem for sperm chemotaxis.Eur. Phys. J. E,47, 59 (2024)
2024
-
[45]
and Komura, S., Emergence of odd elasticity in a mi- croswimmer using deep reinforcement learning.Phys
Lin, L.S., Yasuda, K., Ishimoto, K. and Komura, S., Emergence of odd elasticity in a mi- croswimmer using deep reinforcement learning.Phys. Rev. Res.,6(3), 033016 (2024)
2024
-
[46]
and Man, Y., Navigation of a three-link microswimmer via deep reinforcement learning.Phys
Lai, Y., Heydari, S., Pak, O.S. and Man, Y., Navigation of a three-link microswimmer via deep reinforcement learning.Phys. Rev. Fluids.,10(6), 064103 (2025)
2025
-
[47]
and Choi, H., Autonomous 3D positional control of a magnetic microrobot using reinforcement learning.Nat
Abbasi, S.A., Ahmed, A., Noh, S., Gharamaleki, N.L., Kim, S., Chowdhury, A.M.B., Kim, J.Y., Pan´ e, S., Nelson, B.J. and Choi, H., Autonomous 3D positional control of a magnetic microrobot using reinforcement learning.Nat. Mach. Intell.,6(1), 92 (2024)
2024
-
[48]
and Liebchen, B., Optimal active particle navigation meets machine learning.Europhys
Nasiri, M., L¨ owen, H. and Liebchen, B., Optimal active particle navigation meets machine learning.Europhys. Lett.,142(1), 17001 (2023)
2023
-
[49]
and Pak, O.S., Reinforcement learning of a multi-link swimmer at low Reynolds numbers.Phys
Qin, K., Zou, Z., Zhu, L. and Pak, O.S., Reinforcement learning of a multi-link swimmer at low Reynolds numbers.Phys. Fluids,35(3) (2023)
2023
-
[50]
and Liu, W., An efficient deep reinforcement method for smart particle navi- gation in complex flows.New J
Lu, X., Liu, J. and Liu, W., An efficient deep reinforcement method for smart particle navi- gation in complex flows.New J. Phys., (2026)
2026
-
[51]
and Tsang, A.C
Zou, Z., Liu, Y., Young, Y.N., Pak, O.S. and Tsang, A.C. Gait switching and targeted navi- gation of microswimmers via deep reinforcement learning.Commun. Phys.,5(1), 158 (2022)
2022
-
[52]
and Kirkegaard, J.B
Alonso, A. and Kirkegaard, J.B. Learning optimal integration of spatial and temporal infor- mation in noisy chemotaxis.PNAS nexus,3(7), pgae235 (2024)
2024
-
[53]
Intelligent Navigation of a Magnetic Microrobot with Model-Free Deep Reinforcement Learning in a Real-World Environment.Micromachines,15, 112 (2024)
Salehi, A.; Hosseinpour, S.; Tabatabaei, N.; Soltani Firouz, M.; Yu, T. Intelligent Navigation of a Magnetic Microrobot with Model-Free Deep Reinforcement Learning in a Real-World Environment.Micromachines,15, 112 (2024)
2024
-
[54]
& Schulman, J
Cobbe, K., Klimov, O., Hesse, C., Kim, T. & Schulman, J. Quantifying generalization in reinforcement learning.Proc. 36th Int. Conf. Mach. Learn.97, 1282–1289 (2019)
2019
-
[55]
& Meger, D
Henderson, P., Islam, R., Bachman, P., Pineau, J., Precup, D. & Meger, D. Deep reinforcement learning that matters.Proc. AAAI Conf. Artif. Intell.32, 3207–3214 (2018)
2018
-
[56]
and Z¨ ottl, A
Hartl, B., H¨ ubl, M., Kahl, G. and Z¨ ottl, A. Microswimmers learning chemotaxis with genetic algorithms.Proc. Natl. Acad. Sci. U.S. A.118(19), e2019683118 (2021). 28
2021
-
[57]
Three-sphere low-Reynolds-number swimmer with a cargo container.Eur
Golestanian, R. Three-sphere low-Reynolds-number swimmer with a cargo container.Eur. Phys. J. E.25, 1-4 (2008)
2008
-
[58]
Stanley, K. O. and Miikkulainen, R. Evolving neural networks through augmenting topologies. Evol. Comput.10(2), 99-127 (2002)
2002
-
[59]
S., Farutin, A
Rizvi, M. S., Farutin, A. and Misbah, C. Size and shape affect swimming of a triangular bead-spring microswimmer.Phys. Rev. E98(4), 043104 (2018)
2018
-
[60]
S., Nait-Ouhra, A., Farutin, A., Peyla, P., Rafai, S
Rizvi, M. S., Nait-Ouhra, A., Farutin, A., Peyla, P., Rafai, S. and Misbah, C. Rheological signature of microswimmer phase-locking under flow.Phys. Rev. Fluids4(10), 103302 (2019)
2019
-
[61]
Evolutionary algorithms in theory and practice: evolution strategies, evolutionary programming, genetic algorithms (Oxford university press, 1996)
Back, T. Evolutionary algorithms in theory and practice: evolution strategies, evolutionary programming, genetic algorithms (Oxford university press, 1996)
1996
-
[62]
Eiben, A. E. and Smith, J. E. Introduction to evolutionary computing (springer, 2015)
2015
-
[63]
Propulsion at low Reynolds number.J
Najafi, A., and Golestanian, R. Propulsion at low Reynolds number.J. Condens. Matter Phys. 17(14), S1203 (2005)
2005
-
[64]
and Mikhailov, A
Iima, M. and Mikhailov, A. S. Propulsion hydrodynamics of a butterfly micro-swimmer.Eu- rophys. Lett.85(4), 44001 (2009)
2009
-
[65]
and Bartolo, D
Lauga, E. and Bartolo, D. No many-scallop theorem: Collective locomotion of reciprocal swimmers.Phys. Rev. E Stat. Nonlin. Soft Matter.78(3), 030901 (2008)
2008
-
[66]
M., Kenneth, O., Gat, O., and Avron, J
Leshansky, A. M., Kenneth, O., Gat, O., and Avron, J. E., A frictionless microswimmer.New J. Phys.9(5), 145 (2007)
2007
-
[67]
Active Matter and Artificial Intelligence
Volpe, G., Cichos, F., & Volpe, G. Active Matter and Artificial Intelligence. In bookActive Colloids: From Fundamentals to Frontiers(Royal Society of Chemistry, 2024)
2024
-
[68]
& and Bian, X
Mo, C., Li, G. & and Bian, X. Challenges and attempts to make intelligent microswimmers Front. Phys.11, (2023)
2023
-
[69]
C., Quah, T
Takatori, S. C., Quah, T. & Rawlings, J. B. Feedback Control of Active MatterAnnu. Rev. Condens. Matter Phys.16, 319-341 (2025)
2025
-
[70]
Collective intelligence: A unifying concept for integrating biology across scales and substrates.Commun
McMillen, P., and Levin, M. Collective intelligence: A unifying concept for integrating biology across scales and substrates.Commun. Biol.7, 378 (2024)
2024
-
[71]
& Risi, S
Pontes-Filho, S., Walker, K., Najarro, E., Nichele, S. & Risi, S. A unified substrate for body–brain co-evolution. In *ICLR workshop on Cells2Societies* (2022)
2022
-
[72]
& Efros, A.A
Pathak, D., Lu, C., Darrell, T., Isola, P. & Efros, A.A. Learning to control self-assembling morphologies: a study of generalization via modularity. InProc. 33rd Int. Conf. Neural 29 Inf. Process. Syst., 206 (Curran Associates, Red Hook, NY, 2019). Available at:https: //pathak22.github.io/modular-assemblies/
2019
-
[73]
Sudhakaran, S., Grbic, D., Li, S., Katona, A., Najarro, E., Glanois, C. & Risi, S. Growing 3D Artefacts and Functional Machines with Neural Cellular Automata.Artificial Life Conference Proceedings: ALIFE 2021, 108 (2021). DOI: 10.1162/isal a 00451
-
[74]
Morphological change in machines accelerates the evolution of robust behavior
Bongard, J. Morphological change in machines accelerates the evolution of robust behavior. Proc. Natl Acad. Sci. USA108, 1234-1239 (2011). DOI: 10.1073/pnas.1015390108
-
[75]
Brodbeck, L., Hauser, S. & Iida, F. Morphological evolution of physical robots through model-free phenotype development.PLoS ONE10, e0128444 (2015). DOI: 10.1371/jour- nal.pone.0128444
-
[76]
Lungarella, M., Metta, G., Pfeifer, R. & Sandini, G. Developmental robotics: a survey.Con- nection Science15, 151–190 (2003). DOI: 10.1080/09540090310001655110
-
[77]
Neuroevolution of decentralized decision-making in N -bead swimmers leads to scalable and robust collective locomotion.Commun
Hartl, B., Levin, M., and Z¨ ottl, A. Neuroevolution of decentralized decision-making in N -bead swimmers leads to scalable and robust collective locomotion.Commun. Phys.8, 194 (2025)
2025
-
[78]
Kriegman, S., Blackiston, D., Levin, M. & Bongard, J. A scalable pipeline for design- ing reconfigurable organisms.Proc. Natl Acad. Sci. USA117, 1853–1859 (2020). DOI: 10.1073/pnas.1910837117
-
[79]
Kriegman, S., Blackiston, D.J., Levin, M. & Bongard, J. Kinematic self-replication in reconfigurable organisms.Proc. Natl Acad. Sci. USA118, e2112672118 (2021). DOI: 10.1073/pnas.2112672118
-
[80]
Gumuskaya, G.et al.Motile living biobots self-construct from adult human somatic progenitor seed cells.Adv. Sci.11, 2303575 (2024). DOI: 10.1002/advs.202303575
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.