Multiscale Nudging: From Macroscopic Observations to Microscopic Dynamics
Pith reviewed 2026-06-27 21:35 UTC · model grok-4.3
The pith
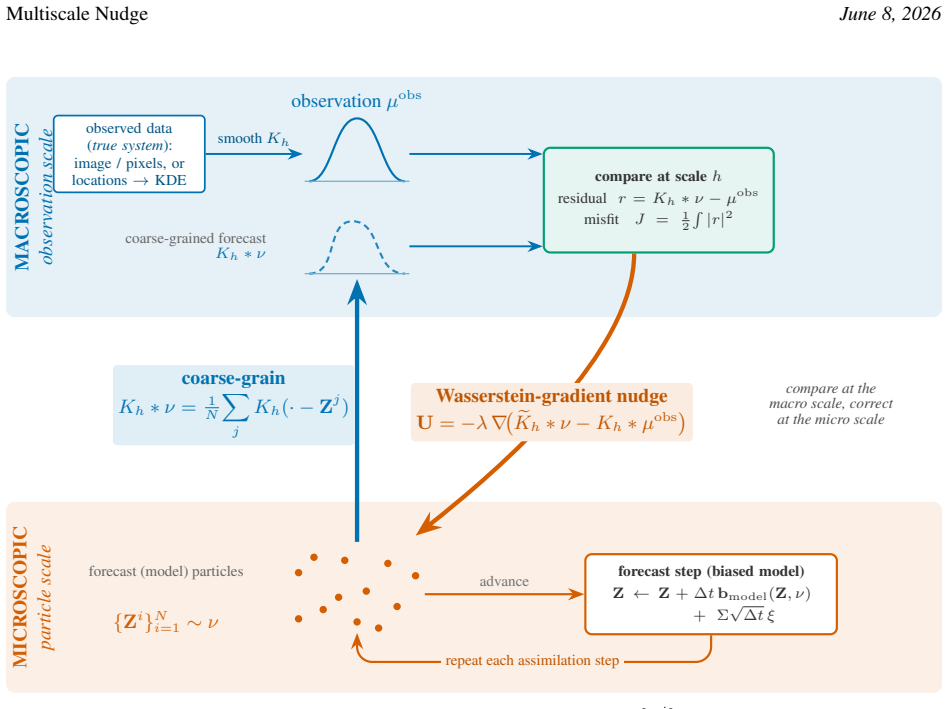
A nudging method uses Wasserstein gradients on smoothed measures to correct microscopic particle dynamics from macroscopic density observations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper establishes a measure-based nudging procedure in which the forecast-observation mismatch is expressed as a quadratic functional on probability measures after identical smoothing, whose Wasserstein gradient supplies a state-space transport velocity; this velocity yields an assimilated McKean-Vlasov equation whose well-posedness and propagation of chaos are proved, together with an L2-stability estimate that exhibits exponential decay to a bias floor controlled by model misspecification whenever exact smoothed observations and a kernel-scale observability condition are satisfied.
What carries the argument
The Wasserstein gradient of the quadratic discrepancy functional defined on smoothed probability measures, which produces a transport velocity that corrects the particle system without particle-to-particle correspondence.
If this is right
- The assimilated dynamics remain well-posed and the interacting particle approximation satisfies propagation of chaos.
- Under exact smoothed observations satisfying the observability condition, the L2 error decays exponentially to a bias floor determined by model misspecification.
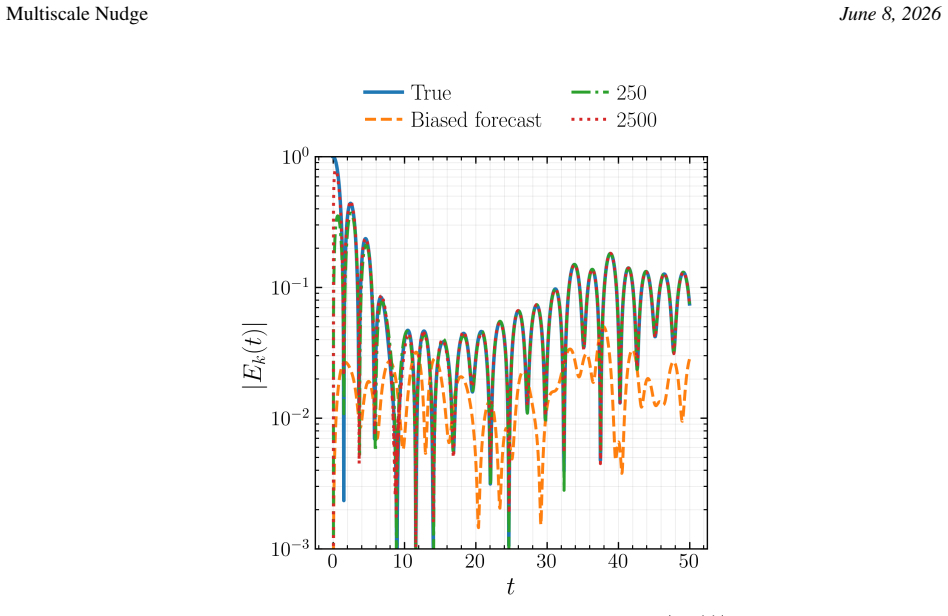
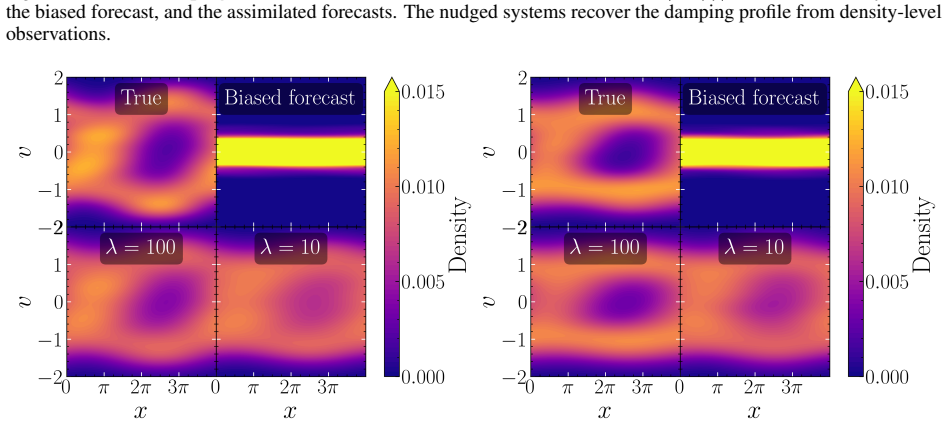
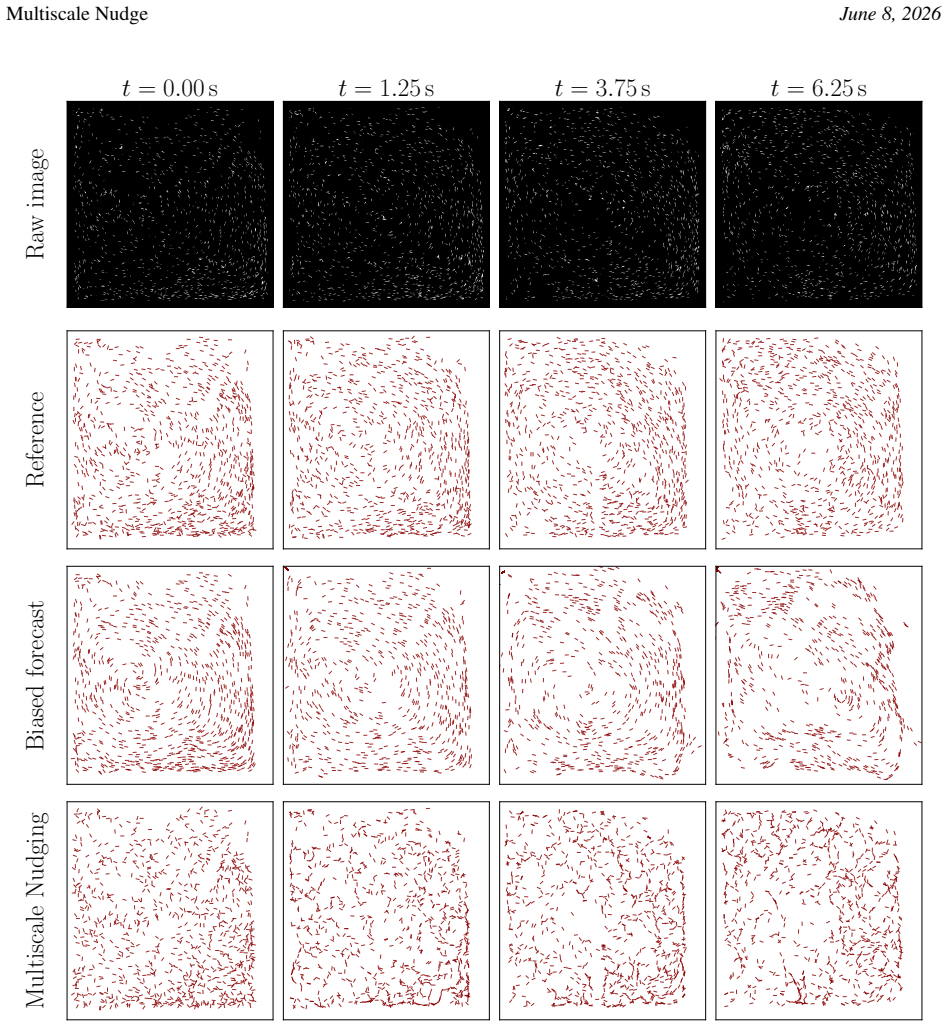
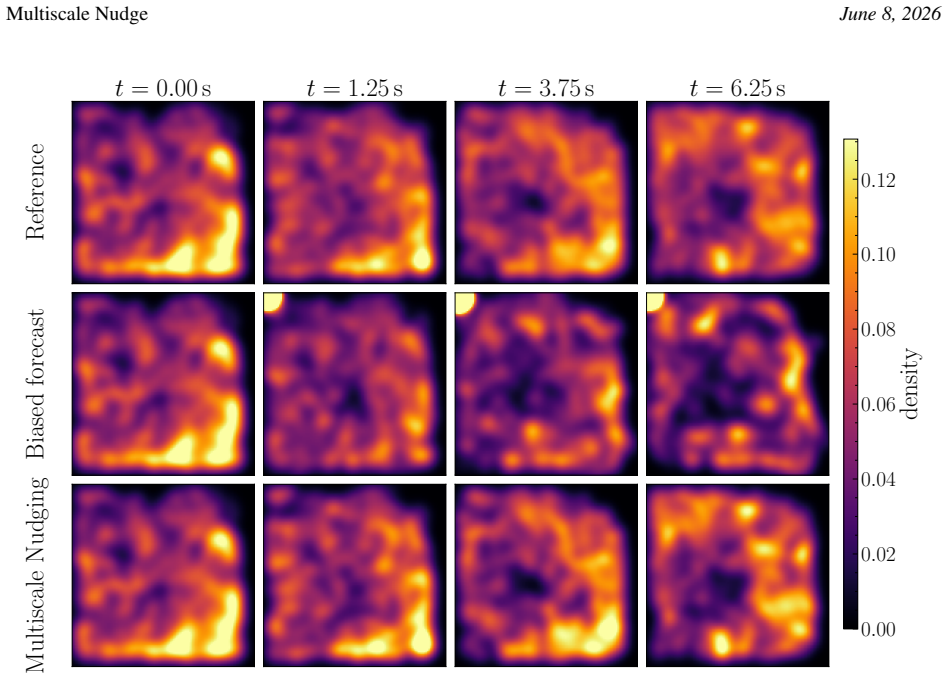
- The method recovers macroscopic structure from incomplete density-level observations on linear, bimodal, chaotic, kinetic, and collective-motion systems without constructing particle matchings or estimating covariances.
Where Pith is reading between the lines
- The same Wasserstein-transport construction could be tested on observation operators other than smoothing kernels provided an analogous observability condition can be verified.
- Because the correction acts directly on the particle velocities, the framework may combine with existing ensemble or variational assimilation schemes that already evolve mean-field particles.
- The bias floor arising from model misspecification suggests a natural diagnostic: persistent residual error after long-time nudging can be used to flag structural deficiencies in the underlying dynamics.
Load-bearing premise
The observability condition at the kernel scale must hold so the smoothed observations supply enough information to drive exponential decay in the stability estimate.
What would settle it
A numerical experiment on one of the tested systems in which the kernel-scale observability condition is deliberately violated and the L2 error between the nudged particles and the target density fails to exhibit exponential decay.
Figures
read the original abstract
We introduce a measure-based nudging framework for assimilating macroscopic observations into microscopic mean-field particle dynamics. The central difficulty is a representation mismatch: the forecast is a labeled particle system, while the observations specify only a smoothed, permutation-invariant density. To address this mismatch, we define the forecast-observation discrepancy as a quadratic functional on probability measures after applying the same smoothing operator used by the observation process. The Wasserstein gradient of this functional induces a transport velocity on state space, which yields a particle-level correction without constructing particle-to-particle matching, linearizing the dynamics, or estimating ensemble covariances. For a fixed observation scale, we prove well-posedness of the assimilated McKean-Vlasov dynamics and propagation of chaos for the interacting particle approximation. Under exact smoothed observations and an observability condition at the kernel scale, we establish an $L^2$-stability estimate showing exponential decay up to a bias floor controlled by model misspecification. Numerical experiments on linear, bimodal, chaotic, kinetic, and collective-motion systems demonstrate that the method can recover macroscopic structure from incomplete density-level observations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a measure-based nudging framework that assimilates macroscopic smoothed observations into microscopic McKean-Vlasov particle dynamics by defining a quadratic discrepancy functional on probability measures (after applying the observation smoothing operator) whose Wasserstein gradient supplies a transport velocity for particle correction. It claims proofs of well-posedness of the assimilated dynamics, propagation of chaos for the particle system, and an L²-stability estimate with exponential decay (up to a model-misspecification bias floor) under exact smoothed observations plus an observability condition at the kernel scale; numerical experiments on linear, bimodal, chaotic, kinetic, and collective-motion systems are presented to illustrate recovery of macroscopic structure.
Significance. If the stability result holds under the stated conditions, the framework supplies a parameter-free, covariance-free assimilation method that directly bridges density-level observations to labeled particle dynamics without linearization or explicit matching; the combination of rigorous well-posedness/propagation-of-chaos results with multiscale numerical tests on both simple and collective-motion systems would constitute a substantive contribution to mean-field data assimilation.
major comments (1)
- [Abstract] Abstract: the L²-stability estimate with exponential decay is asserted to hold under exact smoothed observations plus an observability condition at the kernel scale, yet neither the precise statement of this condition (e.g., a quantitative lower bound on the kernel or injectivity of the smoothed observation operator) nor any verification that it holds for the bimodal, chaotic, or collective-motion examples is supplied. Because the exponential decay claim is conditional on this observability requirement, its absence prevents assessment of whether the central stability result is actually established for the systems studied.
Simulated Author's Rebuttal
We thank the referee for the positive overall assessment and for identifying a clarity issue in the abstract. We agree that the observability condition requires a more explicit statement there and will revise accordingly. The condition itself is defined rigorously in the body of the paper; we address the comment point-by-point below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the L²-stability estimate with exponential decay is asserted to hold under exact smoothed observations plus an observability condition at the kernel scale, yet neither the precise statement of this condition (e.g., a quantitative lower bound on the kernel or injectivity of the smoothed observation operator) nor any verification that it holds for the bimodal, chaotic, or collective-motion examples is supplied. Because the exponential decay claim is conditional on this observability requirement, its absence prevents assessment of whether the central stability result is actually established for the systems studied.
Authors: We agree the abstract should reference the condition more explicitly and will revise it to read: 'Under exact smoothed observations and an observability condition at the kernel scale (a quantitative lower bound ensuring injectivity of the smoothed observation operator, stated precisely in Assumption 3.1), we establish an L²-stability estimate...' The precise formulation appears in Assumption 3.1 (a lower bound on ∫ K_ε(x-y) d(μ-ν)(y) ≥ c ||μ-ν|| for measures at the observation scale) and is used in Theorem 4.3 to obtain the exponential decay up to the model-misspecification bias. We acknowledge that explicit verification of the constant c for the bimodal, chaotic, and collective-motion examples is not supplied in the current text; the numerical experiments demonstrate macroscopic recovery consistent with the theory, but do not compute the observability constant directly. In revision we will add a short paragraph in Section 5 discussing that the condition holds by direct verification for the linear and bimodal cases with the chosen kernels, and is plausibly satisfied at the employed scales for the remaining examples as indicated by the observed exponential convergence rates. If the referee considers a numerical check of the constant necessary, we can include it in an appendix. revision: yes
Circularity Check
No significant circularity; derivation rests on independent mathematical proofs
full rationale
The paper's central results are well-posedness of the assimilated McKean-Vlasov dynamics, propagation of chaos, and an L²-stability estimate with exponential decay (under exact smoothed observations plus an observability condition at the kernel scale). These are established via mathematical analysis rather than by fitting parameters to data or by self-referential definitions. No step reduces a claimed prediction or uniqueness result to a fitted input, self-citation chain, or ansatz imported from prior work by the same authors. The observability condition is an explicit assumption invoked to close the stability proof; it is not derived from the result itself. The derivation chain is therefore self-contained against external benchmarks of analysis and does not exhibit any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
free parameters (1)
- observation scale
axioms (2)
- domain assumption Observability condition at the kernel scale
- domain assumption Matching smoothing operator between forecast and observation
Reference graph
Works this paper leans on
-
[1]
Springer, 2005
Jürgen Jost.Dynamical systems: examples of complex behaviour. Springer, 2005
2005
-
[2]
Springer, 2003
Stephen Wiggins.Introduction to applied nonlinear dynamical systems and chaos. Springer, 2003
2003
-
[3]
Foundations of kinetic theory
Mark Kac. Foundations of kinetic theory. InProc. Third Berkeley Symp. on Math. Stat. and Prob, volume 3, pages 171–197, 1956
1956
-
[4]
A class of Markov processes associated with nonlinear parabolic equations.Proceedings of the National Academy of Sciences, 56(6):1907–1911, 1966
Henry P McKean Jr. A class of Markov processes associated with nonlinear parabolic equations.Proceedings of the National Academy of Sciences, 56(6):1907–1911, 1966
1907
-
[5]
Strong well posedness of Mckean–Vlasov stochastic differential equations with Hölder drift.Stochastic Processes and their Applications, 130(1):79–107, 2020
PE Chaudru De Raynal. Strong well posedness of Mckean–Vlasov stochastic differential equations with Hölder drift.Stochastic Processes and their Applications, 130(1):79–107, 2020
2020
-
[6]
Distribution dependent SDEs with singular coefficients.Stochastic Processes and their Applications, 129(11):4747–4770, 2019
Xing Huang and Feng-Yu Wang. Distribution dependent SDEs with singular coefficients.Stochastic Processes and their Applications, 129(11):4747–4770, 2019
2019
-
[7]
Existence and uniqueness theorems for solutions of Mckean–Vlasov stochastic equations.Theory of Probability and Mathematical Statistics, 103:59–101, 2020
Yuliya Mishura and Alexander Veretennikov. Existence and uniqueness theorems for solutions of Mckean–Vlasov stochastic equations.Theory of Probability and Mathematical Statistics, 103:59–101, 2020
2020
-
[8]
Topics in propagation of chaos
Alain-Sol Sznitman. Topics in propagation of chaos. InEcole d’été de probabilités de Saint-Flour XIX—1989, pages 165–251. Springer, 2006
1989
-
[9]
Propagation of chaos: a review of models, methods and applications
Louis-Pierre Chaintron and Antoine Diez. Propagation of chaos: a review of models, methods and applications. ii. applications.arXiv preprint arXiv:2106.14812, 2021
-
[10]
Mean field limit for stochastic particle systems
Pierre-Emmanuel Jabin and Zhenfu Wang. Mean field limit for stochastic particle systems. InActive Particles, Volume 1: Advances in Theory, Models, and Applications, pages 379–402. Springer, 2017
2017
-
[11]
A mean-field stochastic control problem with partial observations.The Annals of Applied Probability, 27(5):3201–3245, 2017
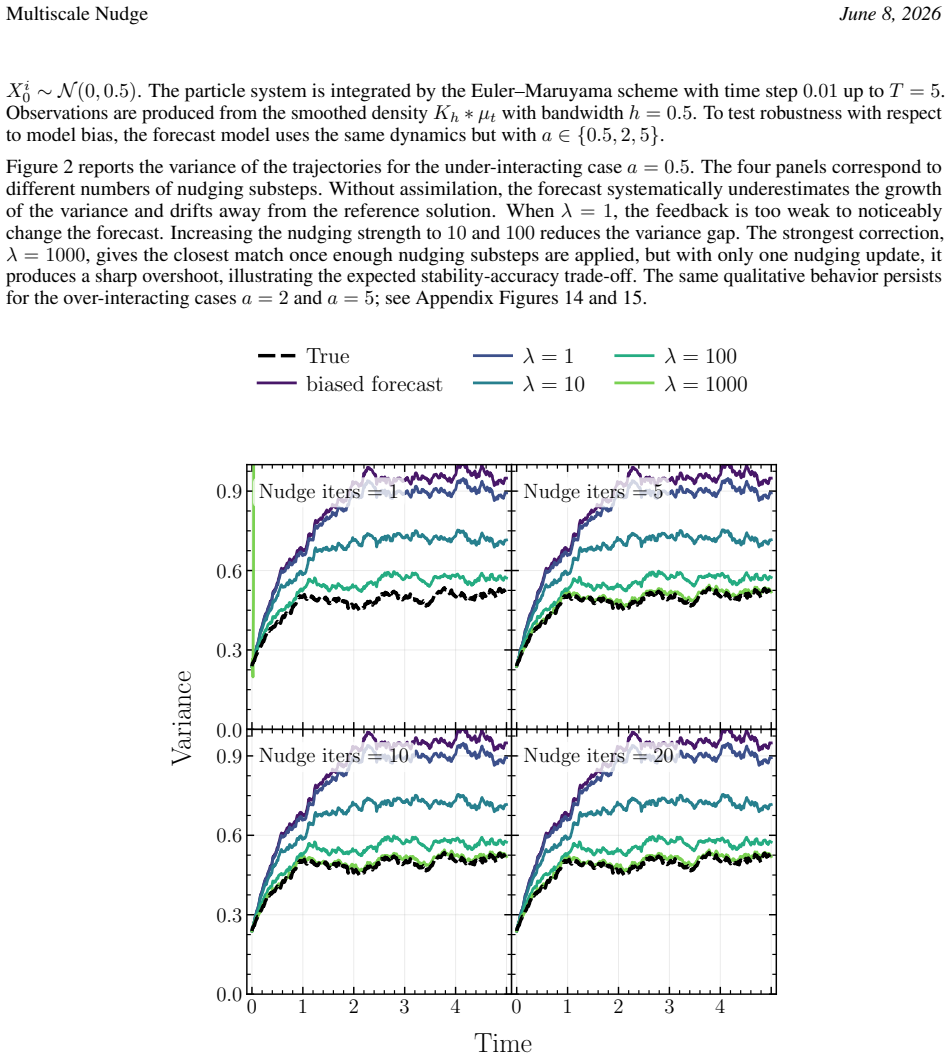
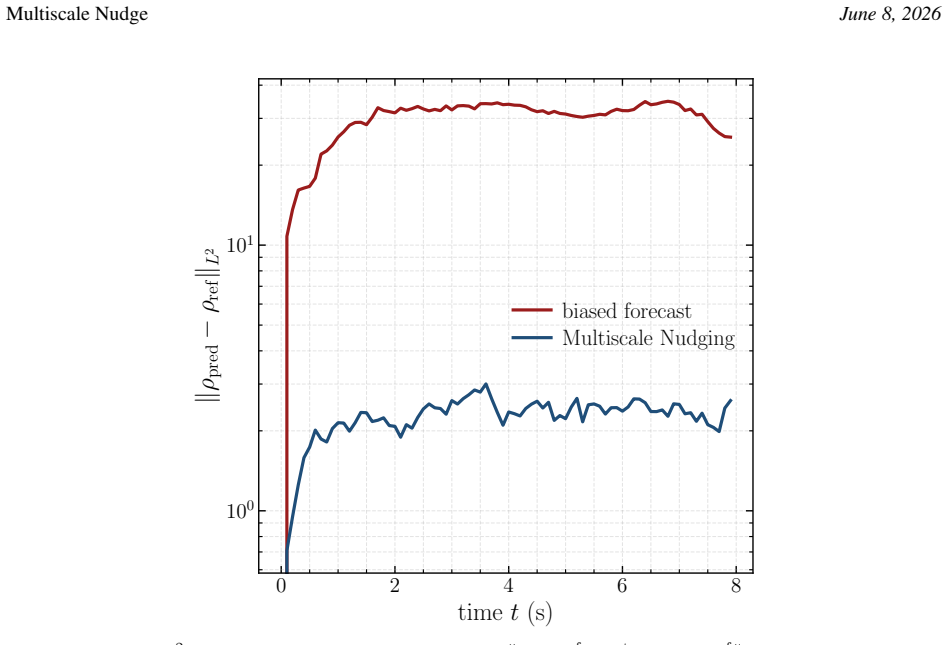
Rainer Buckdahn, Juan Li, and Jin Ma. A mean-field stochastic control problem with partial observations.The Annals of Applied Probability, 27(5):3201–3245, 2017. 20 Multiscale Nudge June 8, 2026 0 2 4 6 8 time t (s) 100 101 ∥ρpred−ρref∥L2 biased forecast Multiscale Nudging Figure 13:Density L2 error on the fish dataset.Dynamics of ∥Kh ∗ˆµforecast t −K h ∗...
2017
-
[12]
A mean field game inverse problem.Journal of Scientific Computing, 92(1):7, 2022
Lisang Ding, Wuchen Li, Stanley Osher, and Wotao Yin. A mean field game inverse problem.Journal of Scientific Computing, 92(1):7, 2022
2022
-
[13]
Stein variational gradient descent as gradient flow.Advances in neural information processing systems, 30, 2017
Qiang Liu. Stein variational gradient descent as gradient flow.Advances in neural information processing systems, 30, 2017
2017
-
[14]
José A Carrillo, Yifan Chen, Daniel Zhengyu Huang, Jiaoyang Huang, and Dongyi Wei. Fisher-Rao gradient flow: geodesic convexity and functional inequalities.arXiv preprint arXiv:2407.15693, 2024
-
[15]
Trainability and accuracy of artificial neural networks: An interacting particle system approach.Communications on Pure and Applied Mathematics, 75(9):1889–1935, 2022
Grant Rotskoff and Eric Vanden-Eijnden. Trainability and accuracy of artificial neural networks: An interacting particle system approach.Communications on Pure and Applied Mathematics, 75(9):1889–1935, 2022
1935
-
[16]
Nonparametric inference of interaction laws in systems of agents from trajectory data.Proceedings of the National Academy of Sciences, 116(29):14424–14433, 2019
Fei Lu, Ming Zhong, Sui Tang, and Mauro Maggioni. Nonparametric inference of interaction laws in systems of agents from trajectory data.Proceedings of the National Academy of Sciences, 116(29):14424–14433, 2019
2019
-
[17]
Learning interaction kernels in heterogeneous systems of agents from multiple trajectories.Journal of Machine Learning Research, 22(32):1–67, 2021
Fei Lu, Mauro Maggioni, and Sui Tang. Learning interaction kernels in heterogeneous systems of agents from multiple trajectories.Journal of Machine Learning Research, 22(32):1–67, 2021
2021
-
[18]
MVNN: A Measure-Valued Neural Network for Learning McKean-Vlasov Dynamics from Particle Data
Liyao Lyu, Xinyue Yu, and Hayden Schaeffer. MVNN: A measure-valued neural network for learning Mckean- Vlasov dynamics from particle data.arXiv preprint arXiv:2604.00333, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[19]
Data-driven prediction of general Hamiltonian dynamics via learning exactly- symplectic maps
Renyi Chen and Molei Tao. Data-driven prediction of general Hamiltonian dynamics via learning exactly- symplectic maps. InInternational conference on machine learning, pages 1717–1727. PMLR, 2021
2021
-
[20]
The discovery of dynamics via linear multistep methods and deep learning: Error estimation.SIAM Journal on Numerical Analysis, 60(4):2014–2045, 2022
Qiang Du, Yiqi Gu, Haizhao Yang, and Chao Zhou. The discovery of dynamics via linear multistep methods and deep learning: Error estimation.SIAM Journal on Numerical Analysis, 60(4):2014–2045, 2022
2014
-
[21]
Louis Sharrock, Nikolas Kantas, Panos Parpas, and Grigorios A Pavliotis. Parameter estimation for the Mckean- Vlasov stochastic differential equation.arXiv preprint arXiv:2106.13751, 2021
-
[22]
Bayesian deep operator learning for homogenized to fine-scale maps for multiscale PDE.Multiscale Modeling & Simulation, 22(3):956– 972, 2024
Zecheng Zhang, Christian Moya, Wing Tat Leung, Guang Lin, and Hayden Schaeffer. Bayesian deep operator learning for homogenized to fine-scale maps for multiscale PDE.Multiscale Modeling & Simulation, 22(3):956– 972, 2024
2024
-
[23]
Extracting structured dynamical systems using sparse optimization with very few samples.Multiscale Modeling & Simulation, 18(4):1435–1461, 2020
Hayden Schaeffer, Giang Tran, Rachel Ward, and Linan Zhang. Extracting structured dynamical systems using sparse optimization with very few samples.Multiscale Modeling & Simulation, 18(4):1435–1461, 2020. 21 Multiscale Nudge June 8, 2026
2020
-
[24]
Random feature models for learning interacting dynamical systems.Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 479(2275), 2023
Yuxuan Liu, Scott G McCalla, and Hayden Schaeffer. Random feature models for learning interacting dynamical systems.Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 479(2275), 2023
2023
-
[25]
Yubin Lu, Xiaofan Li, Chun Liu, Qi Tang, and Yiwei Wang. Learning generalized diffusions using an energetic variational approach.arXiv preprint arXiv:2412.04480, 2024
-
[26]
Hayden Schaeffer. Learning partial differential equations via data discovery and sparse optimization.Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 473(2197), 2017
2017
-
[27]
Sparse model selection via integral terms.Physical Review E, 96(2):023302, 2017
Hayden Schaeffer and Scott G McCalla. Sparse model selection via integral terms.Physical Review E, 96(2):023302, 2017
2017
-
[28]
Quantitative estimates of propagation of chaos for stochastic systems withW −1,∞ kernels.Inventiones mathematicae, 214(1):523–591, 2018
Pierre-Emmanuel Jabin and Zhenfu Wang. Quantitative estimates of propagation of chaos for stochastic systems withW −1,∞ kernels.Inventiones mathematicae, 214(1):523–591, 2018
2018
-
[29]
Probabilistic approach for granular media equations in the non-uniformly convex case.Probability theory and related fields, 140(1):19–40, 2008
Patrick Cattiaux, Arnaud Guillin, and Florent Malrieu. Probabilistic approach for granular media equations in the non-uniformly convex case.Probability theory and related fields, 140(1):19–40, 2008
2008
-
[30]
Multiscale methods for data assimilation in turbulent systems.Multiscale Modeling & Simulation, 13(2):691–713, 2015
Yoonsang Lee and Andrew J Majda. Multiscale methods for data assimilation in turbulent systems.Multiscale Modeling & Simulation, 13(2):691–713, 2015
2015
-
[31]
LEMDA: A Lagrangian-Eulerian multiscale data assimilation framework.Journal of Advances in Modeling Earth Systems, 17(2):e2024MS004259, 2025
Quanling Deng, Nan Chen, Samuel N Stechmann, and Jiuhua Hu. LEMDA: A Lagrangian-Eulerian multiscale data assimilation framework.Journal of Advances in Modeling Earth Systems, 17(2):e2024MS004259, 2025
2025
-
[32]
Test models for filtering with superparameterization.Multiscale Modeling & Simulation, 11(1):282–308, 2013
John Harlim and Andrew J Majda. Test models for filtering with superparameterization.Multiscale Modeling & Simulation, 11(1):282–308, 2013
2013
-
[33]
Particle-continuum multiscale modeling of sea ice floes
Quanling Deng, Samuel N Stechmann, and Nan Chen. Particle-continuum multiscale modeling of sea ice floes. Multiscale Modeling & Simulation, 22(1):230–255, 2024
2024
-
[34]
Kernel analog forecasting: Multiscale test problems.Multiscale Modeling & Simulation, 19(2):1011–1040, 2021
Dmitry Burov, Dimitrios Giannakis, Krithika Manohar, and Andrew Stuart. Kernel analog forecasting: Multiscale test problems.Multiscale Modeling & Simulation, 19(2):1011–1040, 2021
2021
-
[35]
Mean-field limits: from particle descriptions to macroscopic equations
José A Carrillo and Young-Pil Choi. Mean-field limits: from particle descriptions to macroscopic equations. Archive for Rational Mechanics and Analysis, 241(3):1529–1573, 2021
2021
-
[36]
Thierry Paul and Emmanuel Trélat. From microscopic to macroscopic scale equations: mean field, hydrodynamic and graph limits.arXiv preprint arXiv:2209.08832, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[37]
The ensemble Kalman filter: Theoretical formulation and practical implementation.Ocean dynamics, 53(4):343–367, 2003
Geir Evensen. The ensemble Kalman filter: Theoretical formulation and practical implementation.Ocean dynamics, 53(4):343–367, 2003
2003
-
[38]
Springer, 2009
Geir Evensen.Data assimilation: the ensemble Kalman filter. Springer, 2009
2009
-
[39]
Analysis methods for numerical weather prediction.Quarterly Journal of the Royal Meteoro- logical Society, 112(474):1177–1194, 1986
Andrew C Lorenc. Analysis methods for numerical weather prediction.Quarterly Journal of the Royal Meteoro- logical Society, 112(474):1177–1194, 1986
1986
-
[40]
A strategy for operational implementation of 4D- Var, using an incremental approach.Quarterly Journal of the Royal Meteorological Society, 120(519):1367–1387, 1994
PHILIPPE Courtier, J-N Thépaut, and Anthony Hollingsworth. A strategy for operational implementation of 4D- Var, using an incremental approach.Quarterly Journal of the Royal Meteorological Society, 120(519):1367–1387, 1994
1994
-
[41]
Springer, 2020
Nicolas Chopin, Omiros Papaspiliopoulos, et al.An introduction to sequential Monte Carlo, volume 4. Springer, 2020
2020
-
[42]
Continuous data assimilation using general interpolant observables.Journal of Nonlinear Science, 24(2):277–304, 2014
Abderrahim Azouani, Eric Olson, and Edriss S Titi. Continuous data assimilation using general interpolant observables.Journal of Nonlinear Science, 24(2):277–304, 2014
2014
-
[43]
Continuous data assimilation with stochastically noisy data
Hakima Bessaih, Eric Olson, and Edriss S Titi. Continuous data assimilation with stochastically noisy data. Nonlinearity, 28(3):729–753, 2015
2015
-
[44]
Model discovery on the fly using continuous data assimilation.Journal of Computational Physics, 537:114121, 2025
Joshua Newey, Jared P Whitehead, and Elizabeth Carlson. Model discovery on the fly using continuous data assimilation.Journal of Computational Physics, 537:114121, 2025
2025
-
[45]
Continuous data assimilation for hydrodynamics: consistent discretization and application to moment recovery.Journal of Computational Physics, 538:114199, 2025
Jingcheng Lu, Kunlun Qi, Li Wang, and Jeff Calder. Continuous data assimilation for hydrodynamics: consistent discretization and application to moment recovery.Journal of Computational Physics, 538:114199, 2025
2025
-
[46]
Inferring flow parameters and turbulent configuration with physics-informed data assimilation and spectral nudging.Physical Review Fluids, 3(10):104604, 2018
Patricio Clark Di Leoni, Andrea Mazzino, and Luca Biferale. Inferring flow parameters and turbulent configuration with physics-informed data assimilation and spectral nudging.Physical Review Fluids, 3(10):104604, 2018
2018
-
[47]
Data assimilation in large Prandtl Rayleigh–Bénard convection from thermal measurements.SIAM Journal on Applied Dynamical Systems, 19(1):510–540, 2020
Aseel Farhat, Nathan E Glatt-Holtz, Vincent R Martinez, Shane A McQuarrie, and Jared P Whitehead. Data assimilation in large Prandtl Rayleigh–Bénard convection from thermal measurements.SIAM Journal on Applied Dynamical Systems, 19(1):510–540, 2020
2020
-
[48]
Continuous data assimilation for the three-dimensional Navier–Stokes-αmodel.Asymptotic Analysis, 97(1-2):139–164, 2016
Débora AF Albanez, Helena J Nussenzveig Lopes, and Edriss S Titi. Continuous data assimilation for the three-dimensional Navier–Stokes-αmodel.Asymptotic Analysis, 97(1-2):139–164, 2016. 22 Multiscale Nudge June 8, 2026
2016
-
[49]
A data assimilation algorithm for the subcritical surface quasi-geostrophic equation.Advanced Nonlinear Studies, 17(1):167–192, 2017
Michael S Jolly, Vincent R Martinez, and Edriss S Titi. A data assimilation algorithm for the subcritical surface quasi-geostrophic equation.Advanced Nonlinear Studies, 17(1):167–192, 2017
2017
-
[50]
Feedback particle filter with mean-field coupling
Tao Yang, Prashant G Mehta, and Sean P Meyn. Feedback particle filter with mean-field coupling. In2011 50th IEEE conference on decision and control and European control conference, pages 7909–7916. IEEE, 2011
2011
-
[51]
Multilevel ensemble transform particle filtering.SIAM Journal on Scientific Computing, 38(3):A1317–A1338, 2016
Alastair Gregory, Colin J Cotter, and Sebastian Reich. Multilevel ensemble transform particle filtering.SIAM Journal on Scientific Computing, 38(3):A1317–A1338, 2016
2016
-
[52]
Exact particle flow for nonlinear filters
Mr Fred Daum, Jim Huang, and Arjang Noushin. Exact particle flow for nonlinear filters. InSignal processing, sensor fusion, and target recognition XIX, volume 7697, page 92. SPIE, 2010
2010
-
[53]
Sequential Monte Carlo with kernel embedded mappings: The mapping particle filter.Journal of Computational Physics, 396:400–415, 2019
Manuel Pulido and Peter Jan van Leeuwen. Sequential Monte Carlo with kernel embedded mappings: The mapping particle filter.Journal of Computational Physics, 396:400–415, 2019
2019
-
[54]
Ensemble Kalman methods: A mean-field perspective
Edoardo Calvello, Sebastian Reich, and Andrew M Stuart. Ensemble Kalman methods: A mean-field perspective. Acta Numerica, 34:123–291, 2025
2025
-
[55]
An ensemble score filter for tracking high-dimensional nonlinear dynamical systems.Computer Methods in Applied Mechanics and Engineering, 432:117447, 2024
Feng Bao, Zezhong Zhang, and Guannan Zhang. An ensemble score filter for tracking high-dimensional nonlinear dynamical systems.Computer Methods in Applied Mechanics and Engineering, 432:117447, 2024
2024
-
[56]
A score-based filter for nonlinear data assimilation.Journal of Computational Physics, 514:113207, 2024
Feng Bao, Zezhong Zhang, and Guannan Zhang. A score-based filter for nonlinear data assimilation.Journal of Computational Physics, 514:113207, 2024
2024
-
[57]
The variational formulation of the Fokker–Planck equation
Richard Jordan, David Kinderlehrer, and Felix Otto. The variational formulation of the Fokker–Planck equation. SIAM journal on mathematical analysis, 29(1):1–17, 1998
1998
-
[58]
Springer, 2005
Luigi Ambrosio, Nicola Gigli, and Giuseppe Savaré.Gradient flows: in metric spaces and in the space of probability measures. Springer, 2005
2005
-
[59]
Yifan Chen, Daniel Zhengyu Huang, Jiaoyang Huang, Sebastian Reich, and Andrew M Stuart. Gradient flows for sampling: Mean-field models, Gaussian approximations and affine invariance.arXiv preprint arXiv:2302.11024, 2023
-
[60]
Yifan Chen, Daniel Zhengyu Huang, Jiaoyang Huang, Sebastian Reich, and Andrew M Stuart. Sampling via gradient flows in the space of probability measures.arXiv preprint arXiv:2310.03597, 2023
-
[61]
Kinetic equilibration rates for granular media and related equations: entropy dissipation and mass transportation estimates.Revista Matematica Iberoamericana, 19(3):971–1018, 2003
José A Carrillo, Robert J McCann, and Cédric Villani. Kinetic equilibration rates for granular media and related equations: entropy dissipation and mass transportation estimates.Revista Matematica Iberoamericana, 19(3):971–1018, 2003
2003
-
[62]
Aggregation-diffusion equations: dynamics, asymptotics, and singular limits
José A Carrillo, Katy Craig, and Yao Yao. Aggregation-diffusion equations: dynamics, asymptotics, and singular limits. InActive Particles, Volume 2: Advances in Theory, Models, and Applications, pages 65–108. Springer, 2019
2019
-
[63]
Propagation of chaos: a review of models, methods and applications
Louis-Pierre Chaintron and Antoine Diez. Propagation of chaos: a review of models, methods and applications. I. models and methods.arXiv preprint arXiv:2203.00446, 2022
-
[64]
Michele Ballerini, Nicola Cabibbo, Raphael Candelier, Andrea Cavagna, Evaristo Cisbani, Irene Giardina, Vivien Lecomte, Alberto Orlandi, Giorgio Parisi, Andrea Procaccini, et al. Interaction ruling animal collective behavior depends on topological rather than metric distance: Evidence from a field study.Proceedings of the national academy of sciences, 105...
2008
-
[65]
Scale-free correlations in starling flocks.Proceedings of the National Academy of Sciences, 107(26):11865–11870, 2010
Andrea Cavagna, Alessio Cimarelli, Irene Giardina, Giorgio Parisi, Raffaele Santagati, Fabio Stefanini, and Massimiliano Viale. Scale-free correlations in starling flocks.Proceedings of the National Academy of Sciences, 107(26):11865–11870, 2010
2010
-
[66]
Collective motion and density fluctuations in bacterial colonies.Proceedings of the National Academy of Sciences, 107(31):13626–13630, 2010
He-Peng Zhang, Avraham Be’er, E-L Florin, and Harry L Swinney. Collective motion and density fluctuations in bacterial colonies.Proceedings of the National Academy of Sciences, 107(31):13626–13630, 2010
2010
-
[67]
TRex, a fast multi-animal tracking system with markerless identification, and 2d estimation of posture and visual fields.Elife, 10:e64000, 2021
Tristan Walter and Iain D Couzin. TRex, a fast multi-animal tracking system with markerless identification, and 2d estimation of posture and visual fields.Elife, 10:e64000, 2021
2021
-
[68]
ACCESS: Advancing innovation: NSF’s advanced cyberinfrastructure coordination ecosystem: Services & support
Timothy J Boerner, Stephen Deems, Thomas R Furlani, Shelley L Knuth, and John Towns. ACCESS: Advancing innovation: NSF’s advanced cyberinfrastructure coordination ecosystem: Services & support. InPractice and experience in advanced research computing 2023: Computing for the common good, pages 173–176. Association for Computing Machinery, Inc, 2023
2023
-
[69]
SIAM, 2016
René Carmona.Lectures on BSDEs, stochastic control, and stochastic differential games with financial applica- tions. SIAM, 2016
2016
-
[70]
V . S. Varadarajan. On the convergence of sample probability distributions.Sankhy ¯a: The Indian Journal of Statistics (1933-1960), 19(1/2):23–26, 1958. 23 Multiscale Nudge June 8, 2026
1933
-
[71]
∇ ˜Kh(¯Zi,N s − ¯Zk,N s )− ∇ ˜Kh ∗f t(¯Zi,N s ) ∇ ˜Kh(¯Zi,N s − ¯Zl,N s )− ∇ ˜Kh ∗f t(¯Zi,N s ) # ≤ λ2 N2 X k̸=l E
C. Villani.Optimal Transport: Old and New. Grundlehren der mathematischen Wissenschaften. Springer Berlin Heidelberg, 2008. A Proof of Lemma 3.1 Proof. We first prove the regularity statements. The periodized Gaussian K T h is C ∞, periodic, even, and has unit mass on Td. Moreover, all of its derivatives are obtained by periodizing derivatives of the Eucl...
2008
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.