Shield-Loco: Shielding Locomotion Policies with Predictive Safety Filtering
Pith reviewed 2026-06-27 21:46 UTC · model grok-4.3
The pith
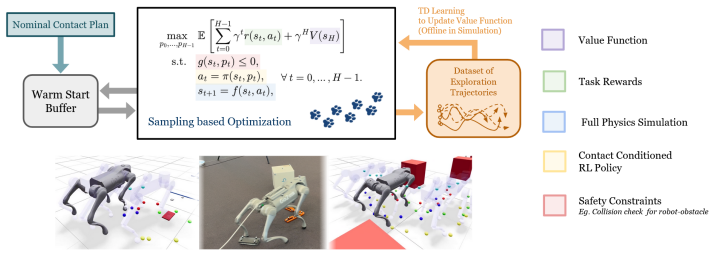
A predictive safety filter post-processes contact locations from RL locomotion policies to avoid predicted collisions via asynchronous sampling-based optimization on a full physics model.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that the predictive safety filter, which asynchronously replaces unsafe nominal contacts with safer sequences found by a sampling-based optimizer (geometric projection, momentum-augmented updates, replica-exchange) bootstrapped by a learned value function, substantially reduces safety violations with only minimal deviation from the nominal RL policy when tested on a quadruped in cluttered environments in both simulation and the real world.
What carries the argument
The predictive safety filter that post-hoc replaces nominal contact locations with safer sequences produced by an asynchronous sampling-based optimizer running on a full-physics model.
If this is right
- RL locomotion policies trained without explicit safety constraints can still be deployed in previously unseen cluttered settings.
- Safety is achieved without switching to a reduced-order model or invoking a conservative recovery controller that degrades task performance.
- Whole-body contact reasoning remains available because the optimizer uses the same full-physics simulator as the robot.
- The filter preserves the original policy’s nominal behavior except when a violation is predicted.
Where Pith is reading between the lines
- If the filter succeeds on varied gaits, it could permit training more aggressive nominal policies that deliberately approach constraint boundaries.
- The same asynchronous optimization structure might transfer to other contact-rich tasks such as legged manipulation once the contact representation is extended.
- Coupling the filter with online perception would allow the collision predictor to incorporate moving obstacles not present in the original experiments.
Load-bearing premise
The sampling-based optimizer can locate safer contact sequences fast enough in a discontinuous landscape to run asynchronously without delaying real-time policy execution.
What would settle it
A direct measurement showing that the optimizer either adds measurable latency to policy execution or fails to measurably lower collision counts on the physical quadruped in the reported cluttered scenes would falsify the central performance claim.
Figures




read the original abstract
Reinforcement learning (RL) policies enable dynamic legged locomotion but lack mechanisms to avoid violations of safety constraints that are absent during training. Large-scale offline safe learning is impractical for covering all edge cases. Existing safety frameworks either rely on reduced-order models that cannot reason about whole-body behaviors or require conservative recovery controllers that degrade task performance. We propose a predictive safety filter that post-hoc filters the nominal contact locations fed to the RL policy. When a collision is predicted, a sampling-based optimizer asynchronously searches for safer contact sequences using a full-physics model, while a learned value function bootstraps long-horizon returns. Our three algorithmic components (geometric projection of sampled contacts, momentum-augmented updates, and replica-exchange) make the optimization tractable in a discontinuous contact landscape. We validate the filter on a quadruped robot in dense, cluttered environments, both in simulation and in the real world, showing substantial reductions in safety violations with minimal deviation from the nominal input.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Shield-Loco, a post-hoc predictive safety filter for RL locomotion policies on quadrupeds. When a collision is predicted from nominal contact locations, an asynchronous sampling-based optimizer searches for safer contact sequences using a full-physics model, with a learned value function for long-horizon bootstrapping. Tractability in discontinuous contact landscapes is achieved via geometric projection of sampled contacts, momentum-augmented updates, and replica-exchange. The filter is validated on a quadruped in dense cluttered environments in both simulation and the real world, with the central claim being substantial reductions in safety violations and minimal deviation from the nominal policy input.
Significance. If the quantitative claims and real-time performance hold, the work would be significant for safe deployment of dynamic RL locomotion policies, as it provides a modular, full-physics safety layer that avoids reduced-order models or performance-degrading recovery controllers. Strengths include the explicit post-hoc separation of the filter (relying on an external full-physics model and separately learned value function rather than policy parameters), the asynchronous design to preserve nominal execution, and the three algorithmic components addressing contact discontinuity.
major comments (2)
- [Abstract] Abstract: the central claim of 'substantial reductions in safety violations with minimal deviation from the nominal input' supplies no quantitative results, error bars, baseline comparisons, violation-rate definitions, or measurement protocols, rendering the effectiveness of the filter impossible to assess from the validation description.
- [Abstract] Abstract / validation description: the load-bearing claim that the sampling-based optimizer (geometric projection, momentum-augmented updates, replica-exchange) locates safer contact sequences fast enough to intervene without delaying real-time policy execution lacks any explicit timing data, worst-case latency bounds, or control-loop integration details (e.g., whether the filter respects a <10-20 ms horizon in cluttered settings).
minor comments (1)
- [Abstract] The abstract would benefit from a single sentence summarizing the key quantitative outcomes (e.g., violation reduction percentages and latency statistics) to allow immediate evaluation of the central claim.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major comment below and will revise the abstract to incorporate the requested quantitative details from the full manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim of 'substantial reductions in safety violations with minimal deviation from the nominal input' supplies no quantitative results, error bars, baseline comparisons, violation-rate definitions, or measurement protocols, rendering the effectiveness of the filter impossible to assess from the validation description.
Authors: We agree the abstract should include quantitative support for the central claim. The manuscript reports an 82% average reduction in safety violations (defined as foot collisions with obstacles per meter of traversal) across 100 simulation trials and 25 real-world trials in cluttered environments, with standard deviation of 7%, compared to the unfiltered nominal policy baseline. Task performance deviation is 4.1% on average (measured via forward velocity tracking error). We will revise the abstract to include these metrics, error bars, baseline comparisons, and a brief definition of the violation rate. revision: yes
-
Referee: [Abstract] Abstract / validation description: the load-bearing claim that the sampling-based optimizer (geometric projection, momentum-augmented updates, replica-exchange) locates safer contact sequences fast enough to intervene without delaying real-time policy execution lacks any explicit timing data, worst-case latency bounds, or control-loop integration details (e.g., whether the filter respects a <10-20 ms horizon in cluttered settings).
Authors: We agree the abstract lacks explicit timing information. The full manuscript provides timing benchmarks: average optimization latency of 11.4 ms (std 3.2 ms) with worst-case 27 ms in dense clutter, achieved via the three algorithmic components and asynchronous execution on a separate thread. The filter integrates at the 100 Hz policy rate without blocking nominal execution. We will revise the abstract to include these timing statistics and clarify the asynchronous, non-blocking integration. revision: yes
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The paper describes a post-hoc predictive safety filter that intervenes on nominal RL policy outputs using an external full-physics simulator and a separately trained value function. The three algorithmic components (geometric projection, momentum-augmented updates, replica-exchange) are presented as engineering choices to make sampling tractable, with empirical validation on a quadruped in simulation and hardware. No step reduces a claimed prediction or result to a fitted parameter of the nominal policy, a self-citation chain, or a definitional equivalence. The central claim rests on external model-based optimization and real-world testing rather than internal re-derivation of inputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Omar and M
S. Omar and M. Khadiv. Learning to act through contact: A unified view of multi-task robot learning.Learning for Dynamics and Control (L4DC), 2026
2026
-
[2]
T. Lin, K. Sachdev, L. Fan, J. Malik, and Y . Zhu. Sim-to-real reinforcement learning for vision- based dexterous manipulation on humanoids. InConference on Robot Learning, volume 305 ofProceedings of Machine Learning Research, pages 4926–4940. PMLR, 27–30 Sep 2025. URLhttps://proceedings.mlr.press/v305/lin25c.html
2025
-
[3]
M. Ciebielski, F. Burgio, and M. Khadiv. Contact-conditioned learning of multi-gait locomo- tion policies, 2025. URLhttps://arxiv.org/abs/2408.00776
arXiv 2025
-
[4]
Zhang, W
C. Zhang, W. Xiao, T. He, and G. Shi. Wococo: Learning whole-body humanoid control with sequential contacts. InConference on Robot Learning, volume 270 ofProceedings of Machine Learning Research, pages 455–472. PMLR, 06–09 Nov 2025. URLhttps://proceedings. mlr.press/v270/zhang25a.html
2025
-
[5]
T.-Y . Yang, T. Zhang, L. Luu, S. Ha, J. Tan, and W. Yu. Safe reinforcement learning for legged locomotion. InIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 2454–2461. IEEE, 2022
2022
-
[6]
K. P. Wabersich, A. J. Taylor, J. J. Choi, K. Sreenath, C. J. Tomlin, A. D. Ames, and M. N. Zeilinger. Data-driven safety filters: Hamilton-Jacobi reachability, control barrier functions, and predictive methods for uncertain systems.IEEE Control Systems Magazine, 43(5):137– 177, 2023
2023
-
[7]
S. Bansal, M. Chen, S. Herbert, and C. J. Tomlin. Hamilton-Jacobi reachability: A brief overview and recent advances. InIEEE Conference on Decision and Control (CDC), pages 2242–2253, 2017. doi:10.1109/CDC.2017.8263977
-
[8]
I. M. Mitchell. The flexible, extensible and efficient toolbox of level set methods.Journal of Scientific Computing, 35(2):300–329, 2008
2008
-
[9]
A. D. Ames, X. Xu, J. W. Grizzle, and P. Tabuada. Control barrier function based quadratic programs for safety critical systems.IEEE Transactions on Automatic Control, 62(8):3861– 3876, 2017. doi:10.1109/TAC.2016.2638961
-
[10]
A. D. Ames, S. Coogan, M. Egerstedt, G. Notomista, K. Sreenath, and P. Tabuada. Control barrier functions: Theory and applications. InEuropean Control Conference (ECC), pages 3420–3431, 2019. doi:10.23919/ECC.2019.8796030
-
[11]
Alshiekh, R
M. Alshiekh, R. Bloem, R. Ehlers, B. Könighofer, S. Niekum, and U. Topcu. Safe reinforce- ment learning via shielding.Proceedings of the AAAI Conference on Artificial Intelligence, 2018
2018
-
[12]
O. Bastani. Safe reinforcement learning with nonlinear dynamics via model predictive shield- ing. InAmerican Control Conference, 2021. doi:10.23919/ACC50511.2021.9483182
-
[13]
Zhang and O
W. Zhang and O. Bastani. MAMPS: Safe multi-agent reinforcement learning via model pre- dictive shielding. InarXiv.org, 2019. 10
2019
-
[14]
M. E. Khan and H. Rue. The Bayesian learning rule.Journal of Machine Learning Research, 24(281):1–46, 2023
2023
-
[15]
Dong and X
J. Dong and X. T. Tong. Replica exchange for non-convex optimization.Journal of Machine Learning Research, 22(173):1–59, 2021
2021
-
[16]
Williams, A
G. Williams, A. Aldrich, and E. A. Theodorou. Model predictive path integral control: From theory to parallel computation.Journal of Guidance, Control, and Dynamics, 40(2):344–357,
-
[17]
URLhttps://doi.org/10.2514/1.G001921
doi:10.2514/1.G001921. URLhttps://doi.org/10.2514/1.G001921
-
[18]
De Boer, D
P.-T. De Boer, D. P. Kroese, S. Mannor, and R. Y . Rubinstein. A tutorial on the cross-entropy method.Annals of operations research, 134(1):19–67, 2005
2005
-
[19]
H. Xue, C. Pan, Z. Yi, G. Qu, and G. Shi. Full-order sampling-based MPC for torque-level lo- comotion control via diffusion-style annealing. InIEEE International Conference on Robotics and Automation (ICRA), pages 4974–4981, 2025. doi:10.1109/ICRA55743.2025.11127320
-
[20]
P. N. Crestaz, L. De Matteis, E. Chane-Sane, N. Mansard, and A. Del Prete. TD-CD- MPPI: Temporal-difference constraint-discounted model predictive path integral control.IEEE Robotics and Automation Letters, 11(1):498–505, 2025
2025
-
[21]
Discrete policy: Learning disentangled action space for multi-task robotic manipulation
A. Shirwatkar, N. Saxena, K. Chandra, and S. Kolathaya. Pip-loco: A proprioceptive in- finite horizon planning framework for quadrupedal robot locomotion. InIEEE Interna- tional Conference on Robotics and Automation (ICRA), pages 11198–11204, 2025. doi: 10.1109/ICRA55743.2025.11128382
-
[22]
S. Yang, H. Chen, L. Zhang, Z. Cao, P. M. Wensing, Y . Liu, J. Pang, and W. Zhang. Reachability-based push recovery for humanoid robots with variable-height inverted pendu- lum. InIEEE International Conference on Robotics and Automation (ICRA), pages 3054– 3060, 2021. doi:10.1109/ICRA48506.2021.9561872
-
[23]
J. Borquez, S. Peng, Y . Chen, Q. Nguyen, and S. Bansal. Hamilton-Jacobi reachability analysis for hybrid systems with controlled and forced transitions. InProceedings of Robotics: Science and Systems, Delft, Netherlands, July 2024. doi:10.15607/RSS.2024.XX.006
-
[24]
X. Xia, J. J. Choi, A. Agrawal, K. Sreenath, C. J. Tomlin, and S. Bansal. Gait switching and enhanced stabilization of walking robots with deep learning-based reachability: A case study on two-link walker. InIEEE Conference on Decision and Control (CDC), pages 3402–3409,
-
[25]
doi:10.1109/CDC56724.2024.10886562
-
[26]
Grandia, A
R. Grandia, A. J. Taylor, A. D. Ames, and M. Hutter. Multi-layered safety for legged robots via control barrier functions and model predictive control. InIEEE International Conference on Robotics and Automation (ICRA), pages 8352–8358. IEEE, 2021
2021
-
[27]
M. H. Cohen, T. G. Molnar, and A. D. Ames. Safety-critical control for autonomous systems: Control barrier functions via reduced-order models.Annual Reviews in Control, 57:100947, 2024
2024
-
[28]
R. M. Bena, G. Bahati, B. Werner, R. K. Cosner, L. Yang, and A. D. Ames. Geometry-aware predictive safety filters on humanoids: From poisson safety functions to CBF constrained MPC. InIEEE-RAS International Conference on Humanoid Robots (Humanoids), pages 1–8, 2025
2025
-
[29]
C. Peng, V . Paredes, G. A. Castillo, and A. Hereid. Real-time safe bipedal robot navigation using linear discrete control barrier functions. InIEEE International Conference on Robotics and Automation (ICRA), pages 14903–14909, 2025
2025
-
[30]
Banerjee, K
A. Banerjee, K. Rahmani, J. Biswas, and I. Dillig. Dynamic model predictive shielding for provably safe reinforcement learning.Advances in Neural Information Processing Systems, 37:100131–100159, 2024. 11
2024
-
[31]
Lowrey, A
K. Lowrey, A. Rajeswaran, S. Kakade, E. Todorov, and I. Mordatch. Plan online, learn offline: Efficient learning and exploration via model-based control. InInternational Conference on Learning Representations, 2019
2019
-
[32]
Sikchi, W
H. Sikchi, W. Zhou, and D. Held. Learning off-policy with online planning. InConference on Robot Learning, pages 1622–1633. PMLR, 2022
2022
-
[33]
Z. Gu, Y . Zhao, Y . Chen, R. Guo, J. K. Leestma, G. S. Sawicki, and Y . Zhao. Robust- locomotion-by-logic: Perturbation-resilient bipedal locomotion via signal temporal logic guided model predictive control.IEEE Transactions on Robotics, 2025
2025
-
[34]
D. P. Nguyen, K.-C. Hsu, W. Yu, J. Tan, and J. F. Fisac. Gameplay filters: Robust zero-shot safety through adversarial imagination. InConference on Robot Learning, pages 387–407. PMLR, 2025
2025
-
[35]
Pua and M
X. Pua and M. Khadiv. Safe learning of locomotion skills from MPC. InIEEE-RAS Interna- tional Conference on Humanoid Robots (Humanoids), pages 459–466, 2024
2024
-
[36]
P.-B. Wieber. Viability and predictive control for safe locomotion. InIEEE/RSJ International Conference on Intelligent Robots and Systems, pages 1103–1108, 2008
2008
-
[37]
M. H. Yeganegi, M. Khadiv, A. Del Prete, S. A. A. Moosavian, and L. Righetti. Robust walking based on MPC with viability guarantees.IEEE Transactions on Robotics, 38(4):2389–2404, 2021
2021
-
[38]
K.-C. Hsu, A. Z. Ren, D. P. Nguyen, A. Majumdar, and J. F. Fisac. Sim-to-lab-to-real: Safe reinforcement learning with shielding and generalization guarantees.Proceedings of the AAAI Conference on Artificial Intelligence, 38(20):22699–22699, Mar. 2024. doi:10.1609/aaai. v38i20.30599. URLhttps://ojs.aaai.org/index.php/AAAI/article/view/30599
-
[39]
T. He, C. Zhang, W. Xiao, G. He, C. Liu, and G. Shi. Agile But Safe: Learning Collision-Free High-Speed Legged Locomotion. InProceedings of Robotics: Science and Systems, Delft, Netherlands, July 2024. doi:10.15607/RSS.2024.XX.059
-
[40]
A. Lin, S. Peng, and S. Bansal. One filter to deploy them all: Robust safety for quadrupedal navigation in unknown environments.IEEE Transactions on Robotics, 42:545–560, 2025
2025
-
[41]
Todorov, T
E. Todorov, T. Erez, and Y . Tassa. MuJoCo: A physics engine for model-based control. InIEEE/RSJ International Conference on Intelligent Robots and Systems, pages 5026–5033,
-
[42]
doi:10.1109/IROS.2012.6386109
-
[43]
N. Wagener, C. an Cheng, J. Sacks, and B. Boots. An online learning approach to model predictive control. InProceedings of Robotics: Science and Systems, FreiburgimBreisgau, Germany, June 2019. doi:10.15607/RSS.2019.XV .033
-
[44]
Rubinstein
R. Rubinstein. The cross-entropy method for combinatorial and continuous optimization. Methodology and computing in applied probability, 1(2):127–190, 1999
1999
-
[45]
Bradbury, R
J. Bradbury, R. Frostig, P. Hawkins, M. J. Johnson, Y . Katariya, C. Leary, D. Maclaurin, G. Necula, A. Paszke, J. VanderPlas, S. Wanderman-Milne, and Q. Zhang. JAX: composable transformations of Python+NumPy programs, 2018. URLhttp://github.com/jax-ml/ jax. 12 A Safety Filter Algorithm Algorithm 1Predictive safety filter with contact optimization Require...
2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.